
For the prototype, there was too much friction in the linkage system for lifting the muff covers. For the next design, the motors lift the muff covers directly using the motor instead of using a linkage system. This is to decrease the friction and complex calculations needed to create the linkage system. I tested it with other people wearing it and found that it works occasionally as the friction created moved the centre of gravity of the movement which caused the motor to be unable to lift the muff covers.
For the upcoming goals, I will be adding a visor to cover sight and a ultrasonic sensor holder to the headset. In order to create the visor I focus on two major problems. First, what the measurements of a average head? Second, how many motors do I need in order to lift the visor with only using a power bank with a output of 5 V and 2 A?

I tried to measure the distance between the centre the headset to the front of my nose but I failed due to parallax errors.
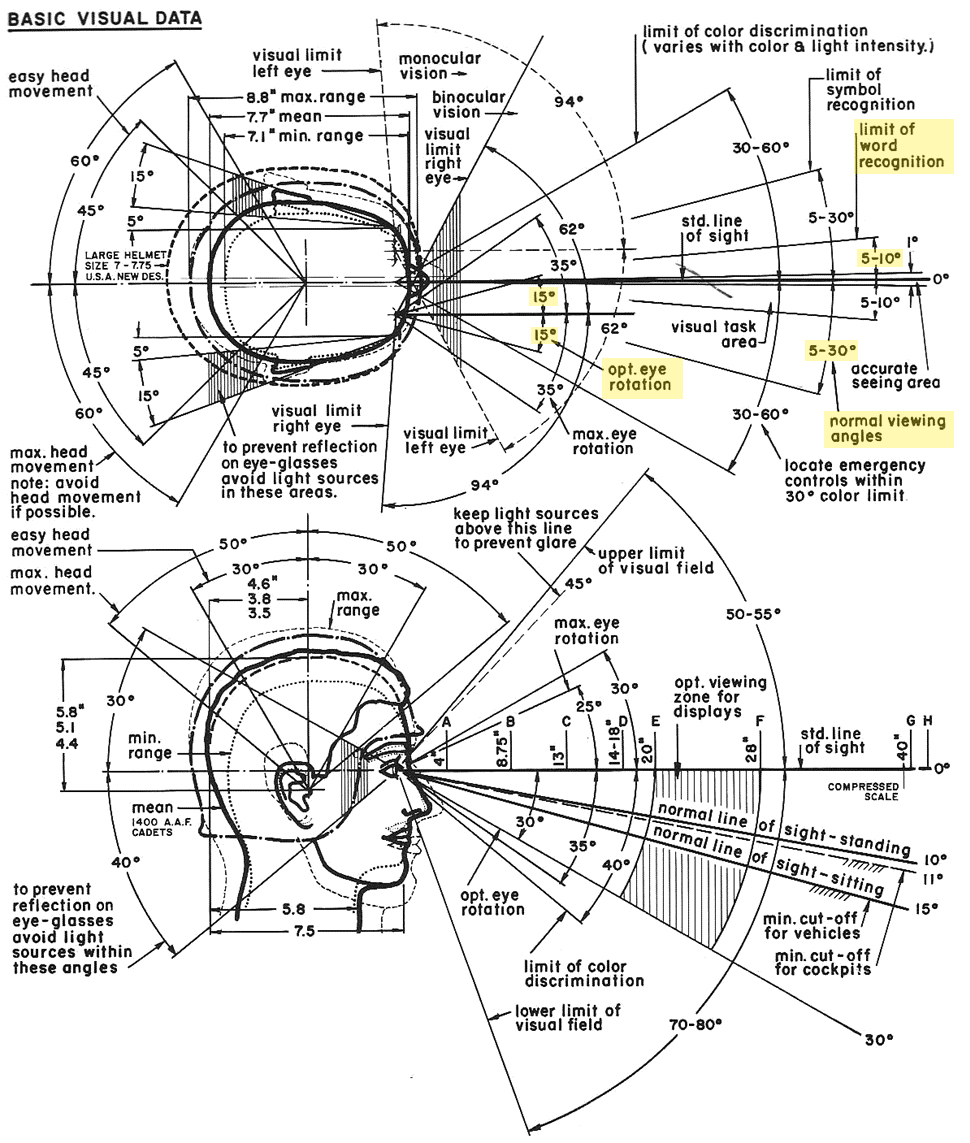
Then I decided to look up a average head size chart for the ergonomics I need. I was quite surprised that the total length from the centre of the head to front of the head is close to 10 cm. Deducting the length of the headset(1.5 cm), and adding the offset from our eye(3 cm), I need to make a arm that has a length of 11.5 cm away from the motor. This means that the motor can only lift extremely light weight which poses a problem for design the visor.
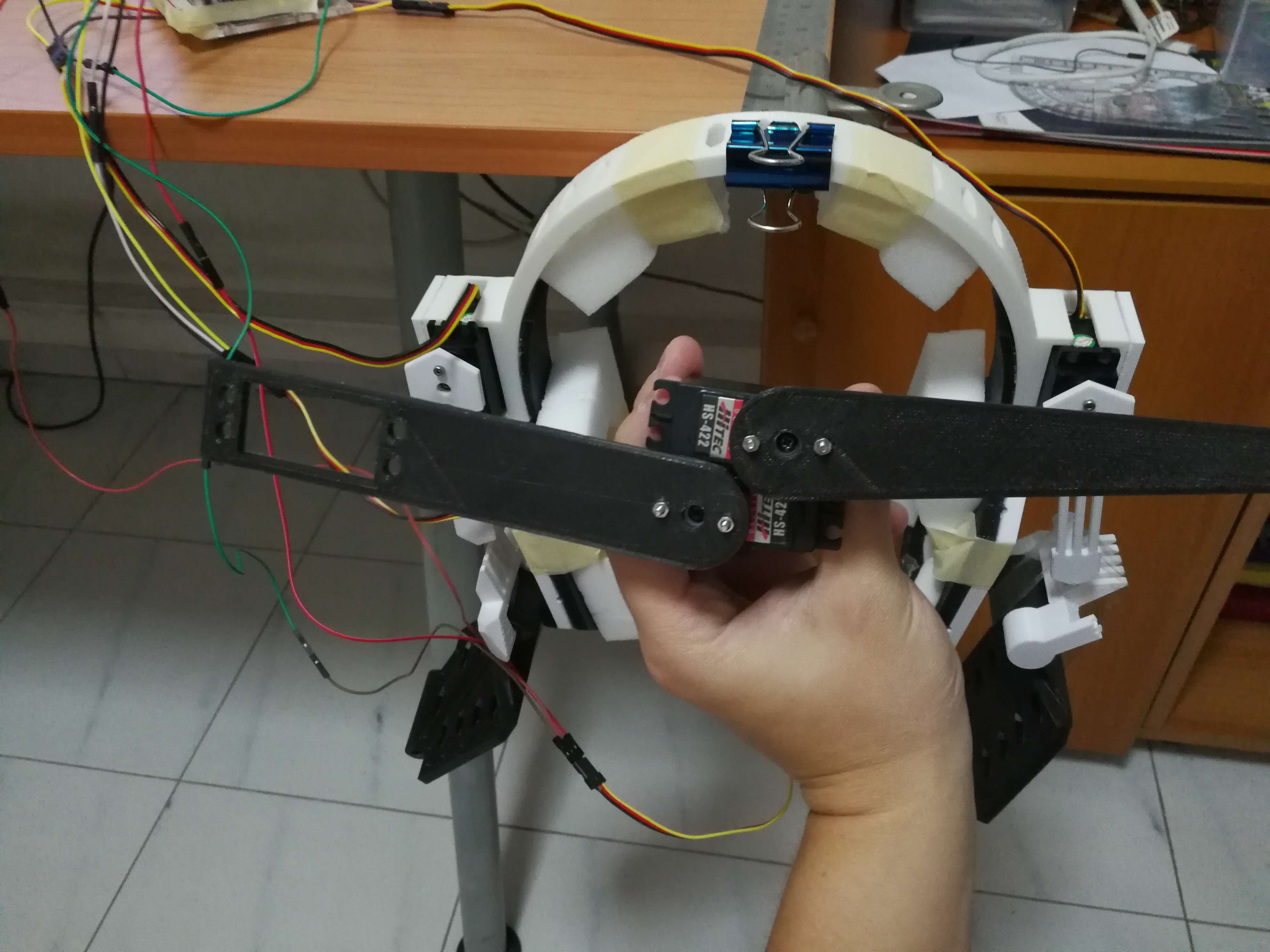
I decided to test how much load the motors can carry only using a power bank. Here are some of the components for the test.
- 2x Hitec HS-322 motors (lifting) a load of 70-90 grams with arm length of 9 cm (for the ear muffs, should be even lighter, but testing with heavier weight allows me to have buffer)
- 1x Hitec HS-322 motor (lifting) a load of 70-90 grams with arm length of 14 cm (for the visor)
- 2x Hitec HS-422 motor (panning) a load of 70-90 grams with arm length of 14 cm (for visor)

Panning means the motor is in above position. Panning uses less power to move a part with same load as compared to lifting it.
Here is a list of combinations that is possible to work:
- 2x Hitec HS-322 motors (lifting) + 1x Hitec HS-322 motor (lifting)
- 2x Hitec HS-322 motors (lifting) + 2x Hitec HS-422 motor (panning)
- 4x Hitec HS-422 motor (panning a load of 70-90 grams with arm length of 9 cm)
Here is list of combinations that is not possible work:
- 4x Hitec HS-322 motors (lifting)
From this findings, I would probably go with the setting of 2x Hitec HS-322 motors (lifting) + 1x Hitec HS-322 motor (lifting).
The reason why I didn’t choose the panning set up:
Panning takes up more space for the movement as it is moving in a rotational manner. This means the arm of the visor will be way longer, maybe 20cm? If there are two motors panning, it will make the entire head set much heavier and the centre of gravity for the head set is also shifted towards to front of the head as all the weight will be gathered there.
For my next goal, I will try to create a design where by the motor is very near the front of the head to decrease the distance of the load from the pivot point of the motor so that there will be lesser power needed to lift it (visor).