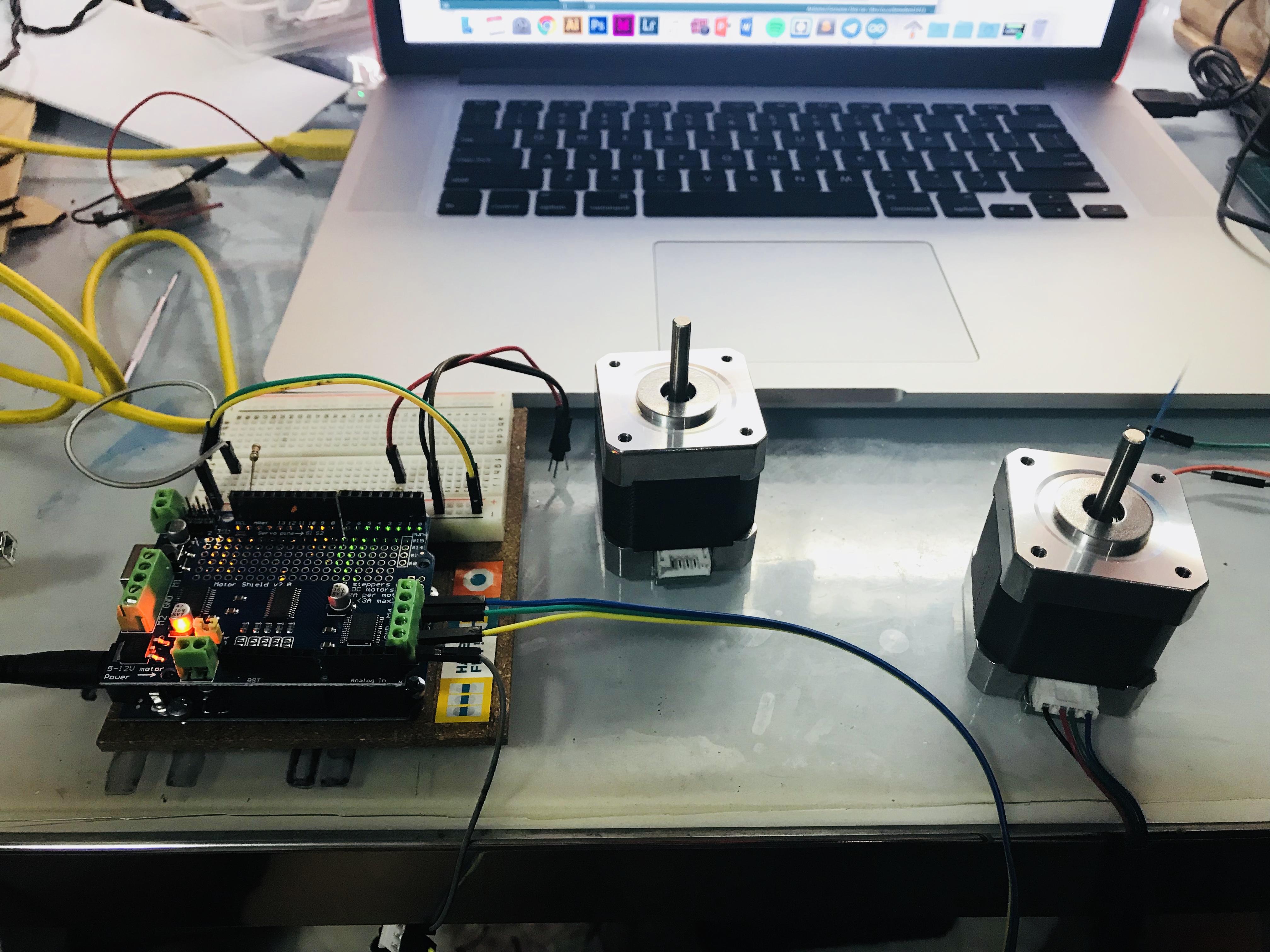
In this project, I have explored stepper motor using motor shield. This motor shield is a similar one with ada fruit v2 that can power up 2 stepper motor or 4 servo motor.
Initially the 12V external power was connect though the Arduino port, however the Arduino and motor shield get really hot after it runs for 5 mins. There was once it even become smoky and I quickly stops the power.
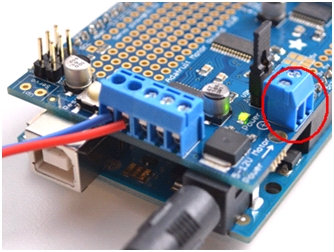
After reading online, a safer way was to power the motor directly from the motor shield board. As for my motor, each of them needed 1.65Am and 12V but adding two motor together I would need 3.3Am.

I bought this at Sim Lim for the external power adaptor! After a few rounds of trial and error my motors still did not work properly and I realise that the motor shield only provides maximum 3Am for the motors.
However, I tried to wire up the installation in order to calibrate the movement and try if the motor are able to move up the umbrella.

The installation too longer then I expected as there were many problem during this process. Considering the length of the wiring and where to position the motors.
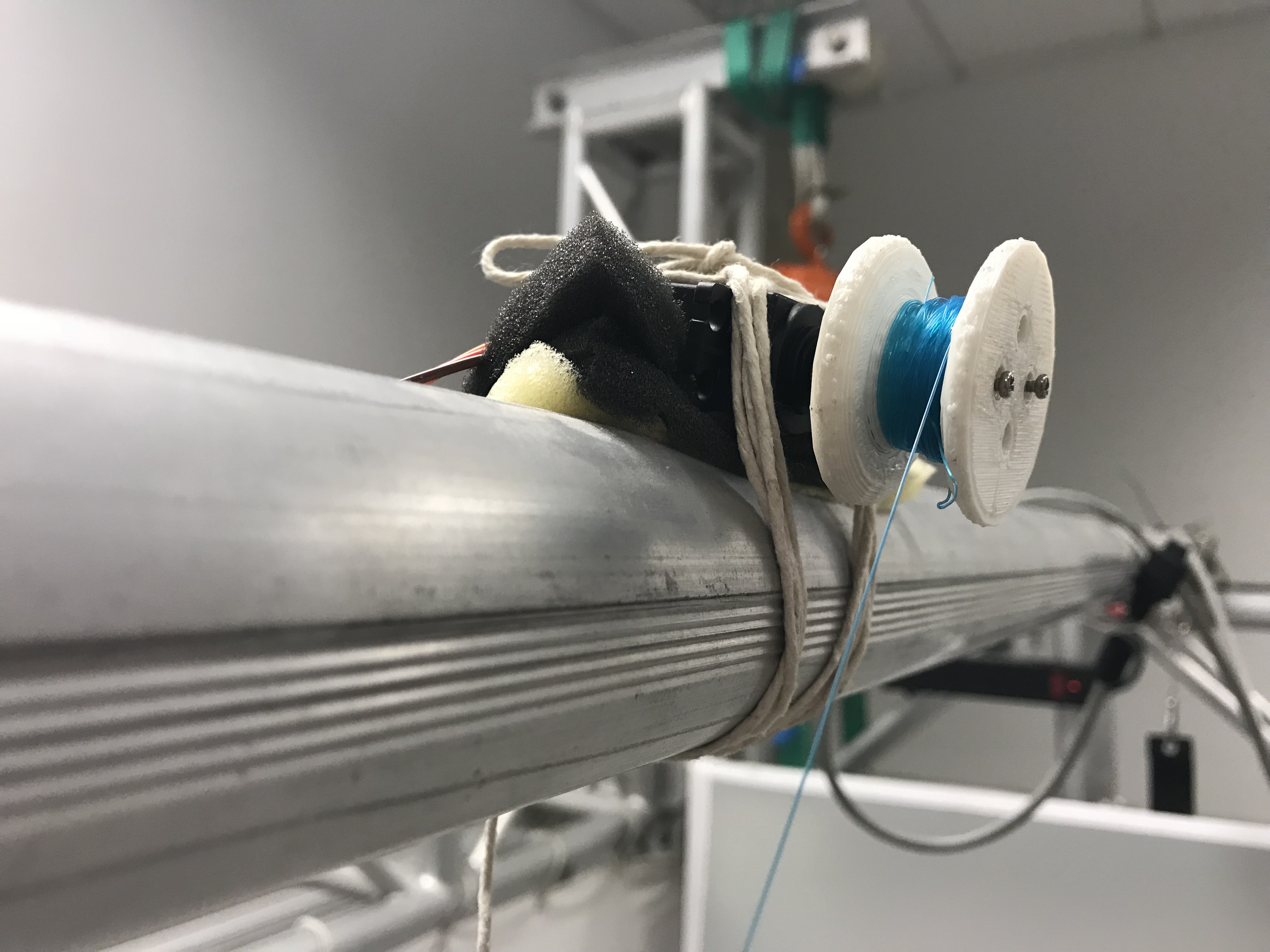
The motor creates loud vibrating sound when I did not put any sponge below. After adding sponge it helps to reduce the friction between the metal and motor but still there is some noise.
In this video it shows the problem with my motor where there is a 1 sec interval. The motor move very slowly and it is always jerking. It get better after I changed the code but it still move very slowly. Unfortunately and fortunately I short circuit and got my motor shield burn. I have to go back to my first option of servo motor.
Surprisingly, servo motor works well and able to hold my umbrella! After setting it up and calibrating the sequence is shown in the above video. When calibrating the code, I did it in step by step. I mark its initial position on the floor and start to code from there. Every time I upload a position, I would blank out the previous one and re-upload again.

The delay helps to tell the motor about the duration and it will continue spinning until what the delay stated. After the whole process, there is also a return code for the umbrella to return to initial position.
I also try it with the detection, however the shadow of the umbrella would block what is intended so, I decided to go without the detection. Moreover in this trial run the spot light did not help the umbrella to stand out but blended into the background more. After that I tried offing the lights and put an spot light LED in to the umbrella for glowing effect which I feel it work very well!

In over experience, although what I have did for the stepper motor might not been used for the final construction but I have learnt a lot from it. This project gives me a strong sense of satisfaction after I have overcome many obstacles and burn 2 Arduino. I am really glad that everything still when well! 🙂