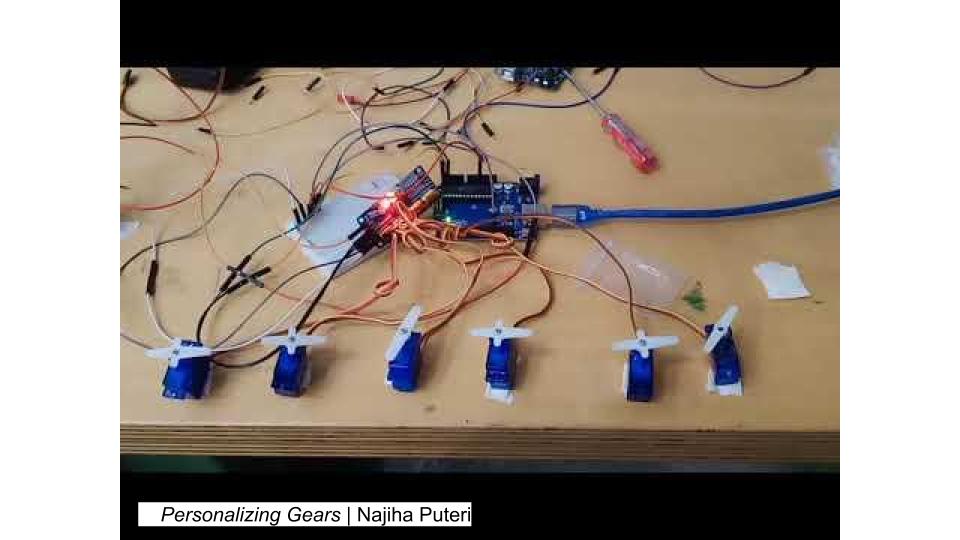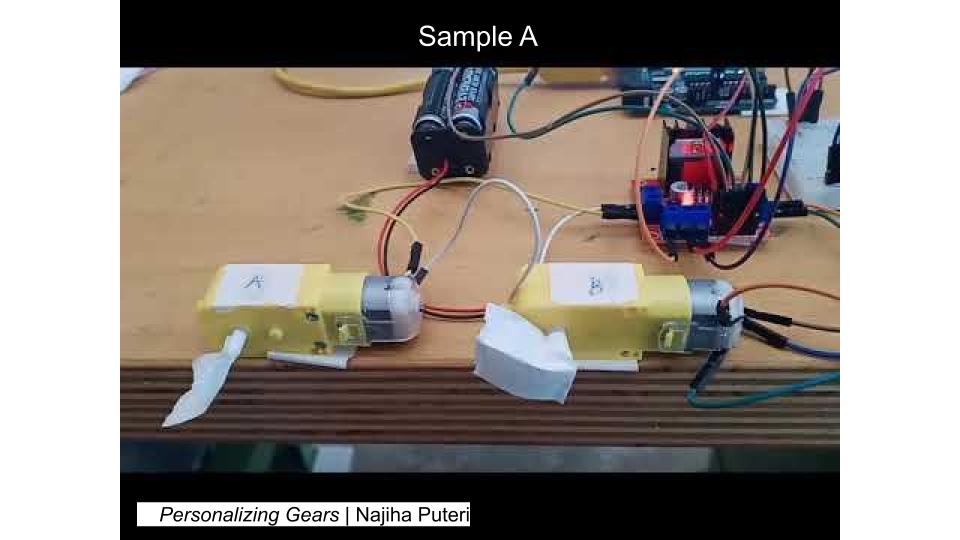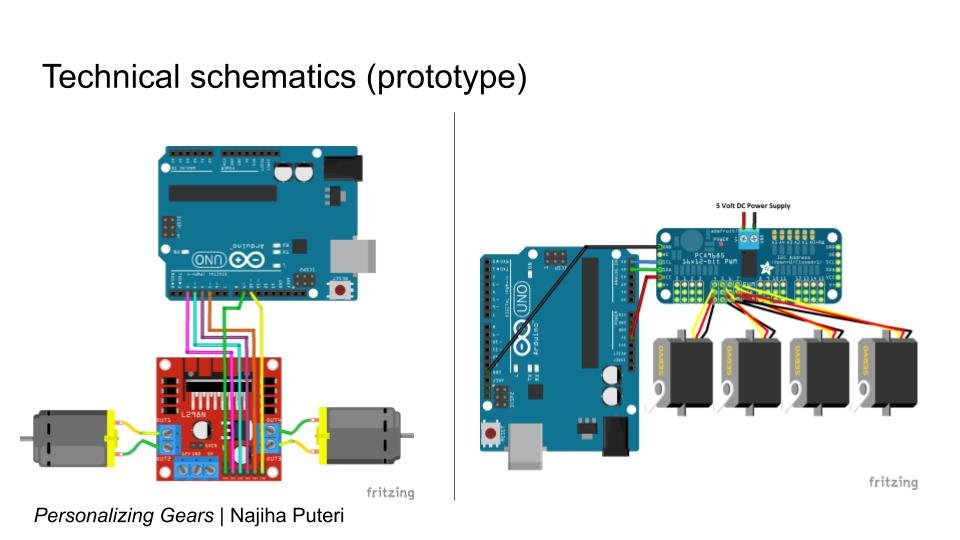


Building up on previous consultation, I had to make some changes. I switched circuit boards from using 16 Channel Servo Shield and Servo Motors, to L298N and DC Gear Motors. This was because there use of gear motors was more flexible in its movement and speed, where it can move beyond 180degress clockwise and anti-clockwise. The flexibility and range of values I play around would keep my input of data more varied and accurate to what type of movement I want to make as much as possible.
Using L298n helps to control two motors in their movement and direction.The circuit diagram below depicts a full sketch (with inaccuracy in the L293D)


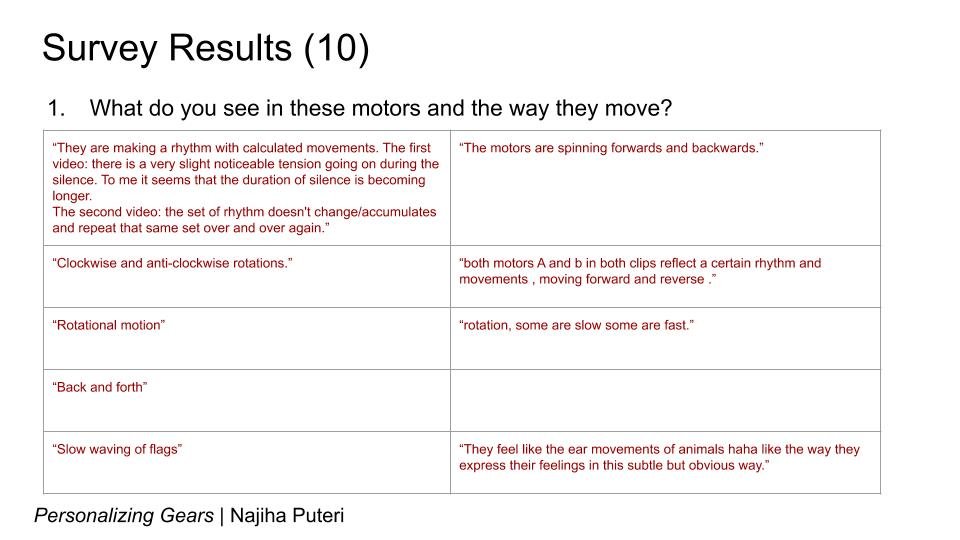
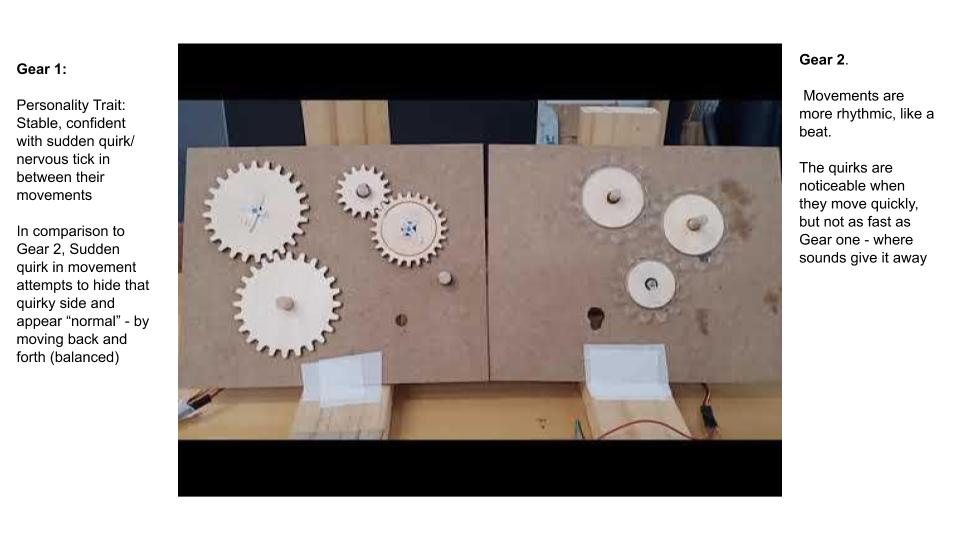
I haven’t really explored much with the way motors move, but I made this sample of movements and played around with the delays and pauses. I created layers of code where there is a build of pauses after each set of movements. The pauses gets longer and longer at the end of the set. Each set creates a type of rhythm that appears predictable. But the pauses at end are delayed after each round, creating some sense of anticipation.
I think I have a lot more to explore in terms of their movements as of now.
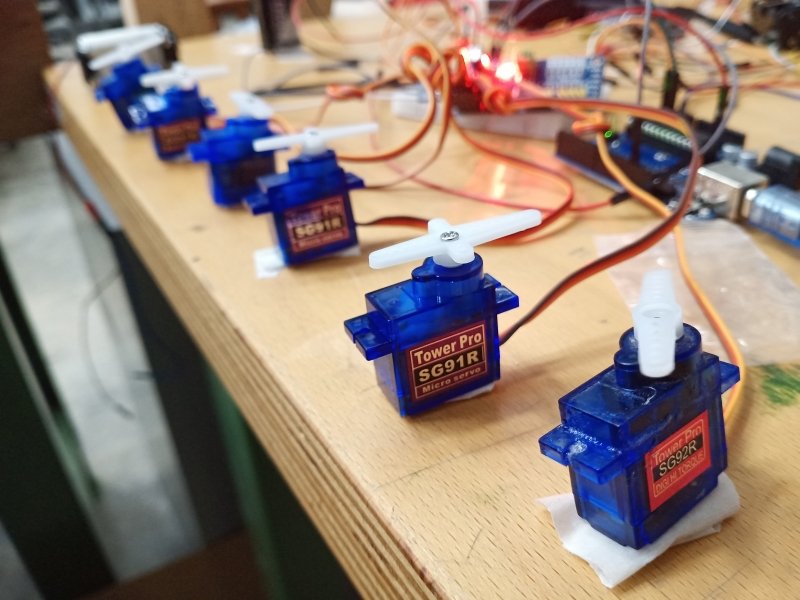
I discovered a useful device to power multiple servos at same time easily. It came from this tutorial.
This was a far better option as compared to using simple Arduino- breadboard jumper wires-battery method to power servo. This was because I see my project using multiple if not, more than 10 servos at once, given installation including some interactivity and movement. However, I will keep my options open in using the types of materials to use.
The 16 Channel Servo Shield was a better alternative to powering multiple servos. It is a device with built in 3 pin male jumpers for servo wires to be slot in. As described, it can power 16 servos at once, within one device so this makes things efficient in technical part of the project.
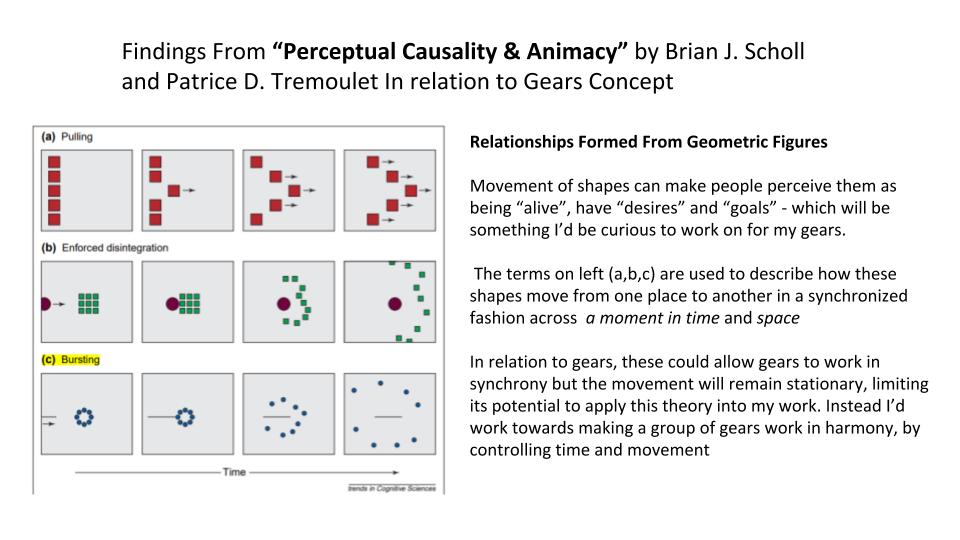
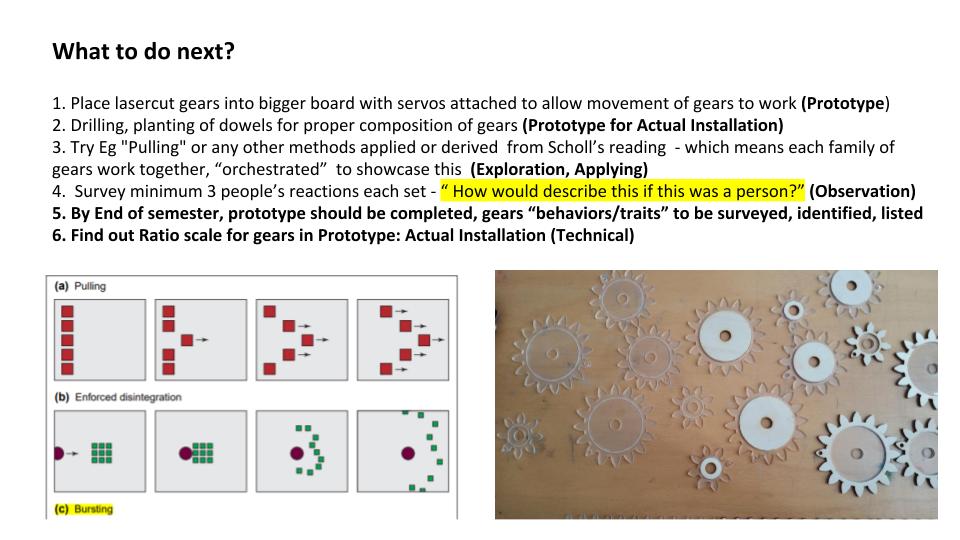
Aside from the technical side, I did not made any application of theories of ” – which included but will likely do them soon. Here is the reference from the book recommended to me. Guesstimating to do
a)Pulling, b) Enforced disintegration c) Bursting as seen below.
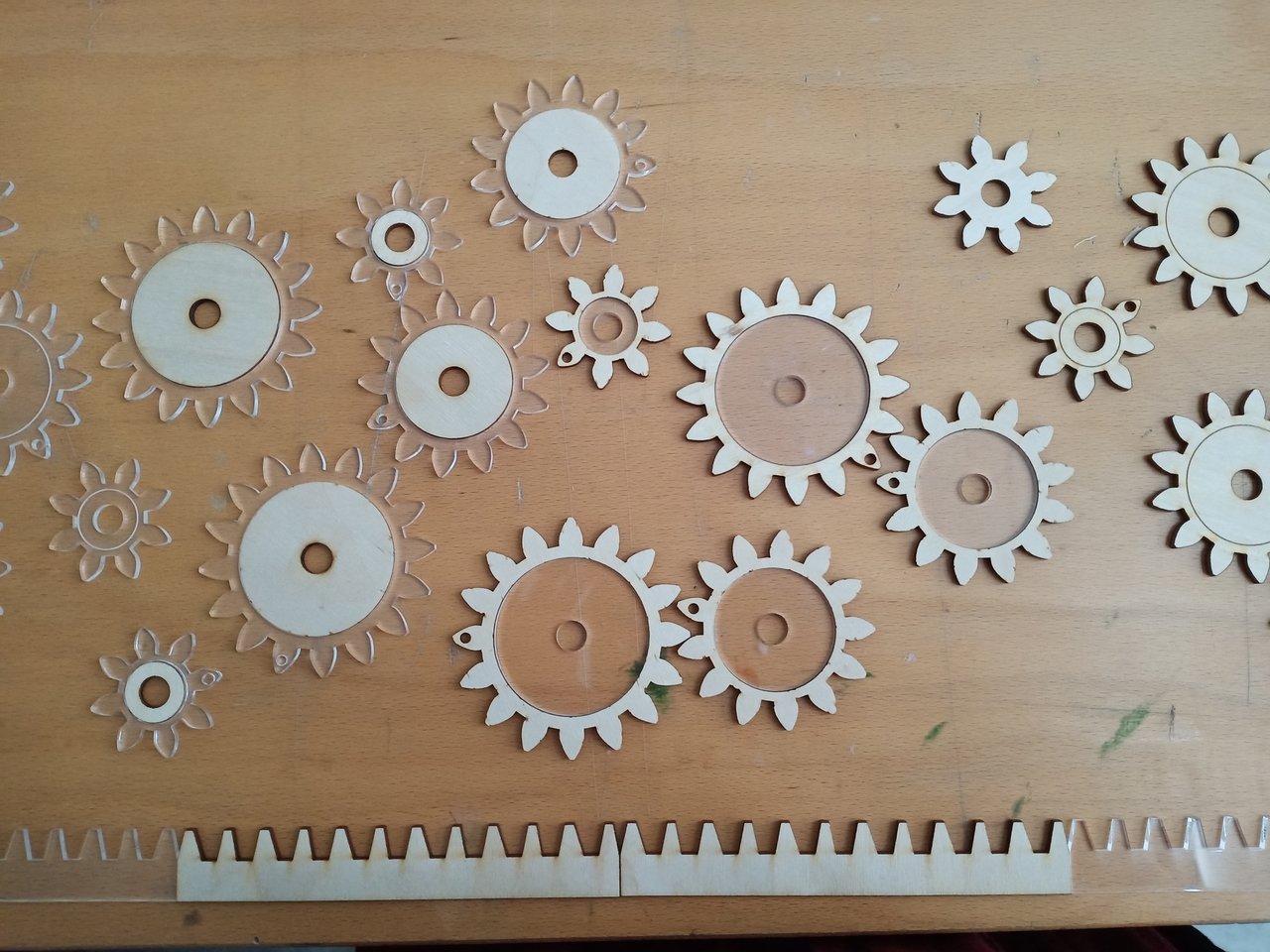
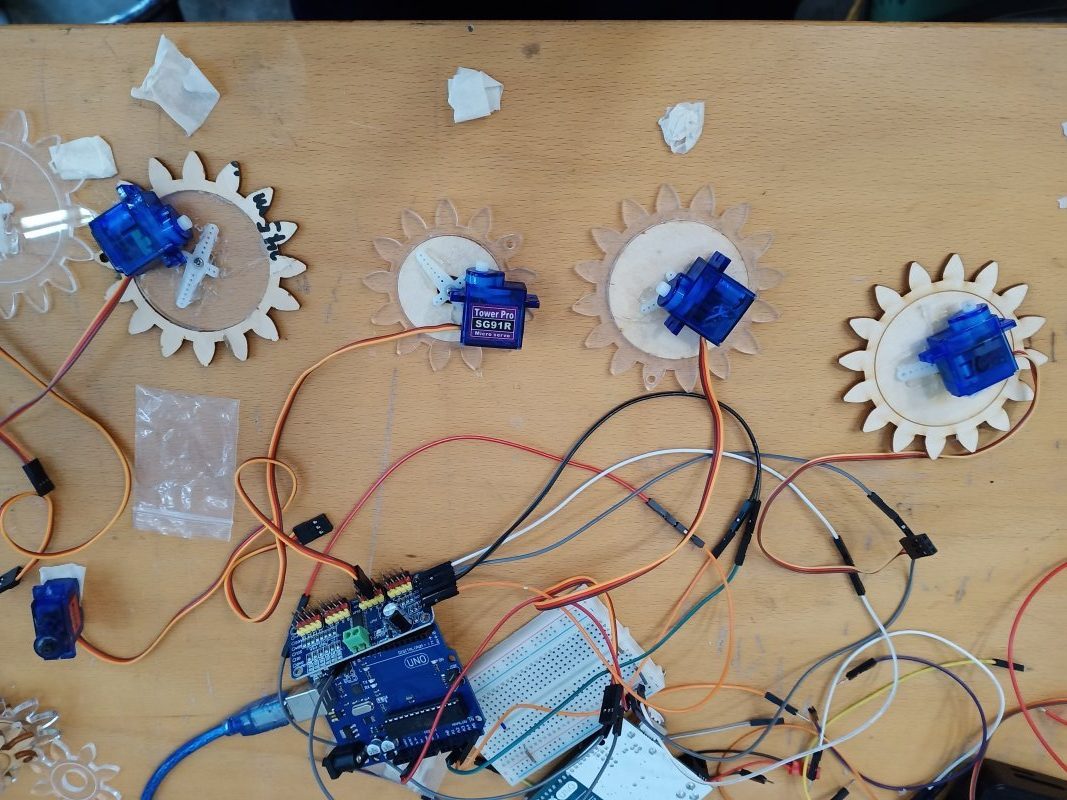
Arthur Ganson’s works are some works I’m supposed to refer to, but still working on experimenting different ways gears could ‘express’ themselves. I’m not so fond of working outside of simple mechanisms of gears. For the current board that you are seeing right now, you see some bent wires connected to a section of the gear tooth (lasercut).
The small hole in the tooth for some gears was there to observe how many rounds it makes when it connected with servo. Instead, I just attached some wire found and tried to make some “connections” – between one entity and the other. This part is seen in the last clip (below). These are just shots of how I build the servos, prepared the boards and planting of gears, and saw how servos coded differently ( in terms of delay) for each video, they move differently too.
Currently, there were some technical challenges in powering these servos to play at the same time with gears attached, and I am still working on this before proceeding to play around with movements of gears, with reference to the Scholl’s experiments. The movement of gears was meant to be explored in the coming weeks, so I’m hoping to with lesser assignment piling up, there will be more time for this.
In conclusion, I’m way behind schedule in terms of experimentation! But, I’m quite hopeful I can at least find the time to further refine my process of working around with gears in the coming days.
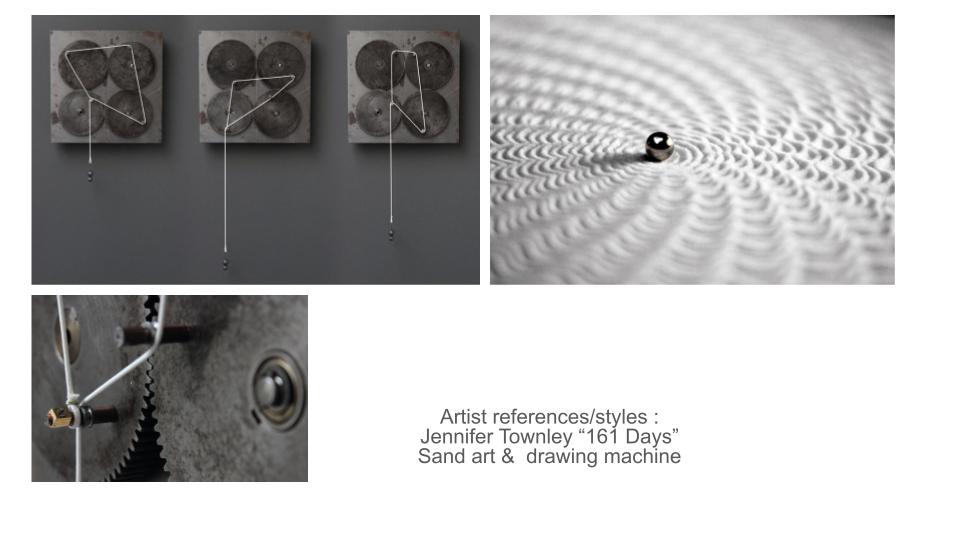
And last one is one by Jennifer Townley. In one of her works, she uses the gears and several other mechanical objects that are put together and interact with one another. In the video as you can see, her use of spring attached to one the letters give way to some movement to the gear, which I thought was interesting. At 0:36 second mark, there is a “torque” on the gear beside half-gear “D”, which causes “D” to move. Afterwhich, once it is off the torque, the letter bounces of the spring that is attached to it. These movements also can accompany the movement of gears without interrupting their basic motion. When applied to my case of using 180 servo motors to rotate gears, I could try adding a torque and some spring to bring out some effect from these gears.
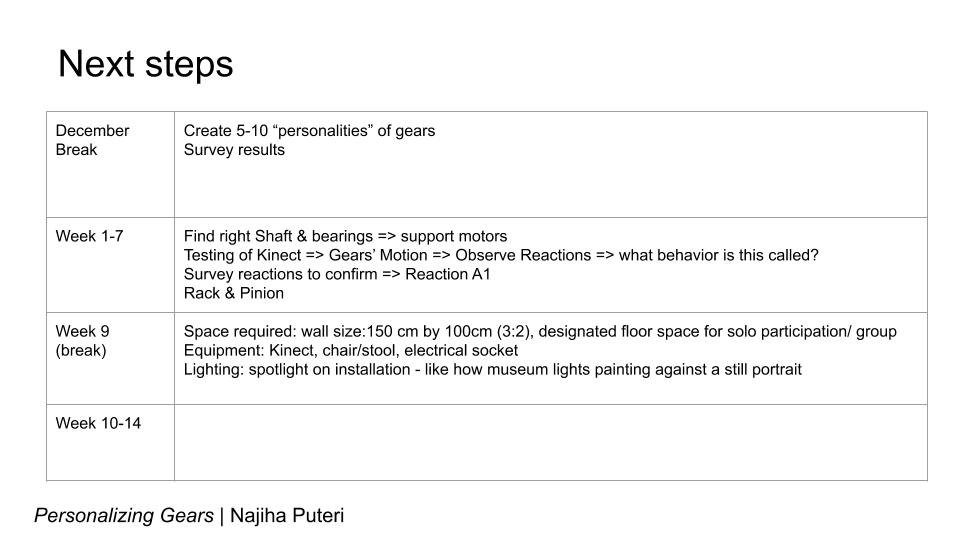
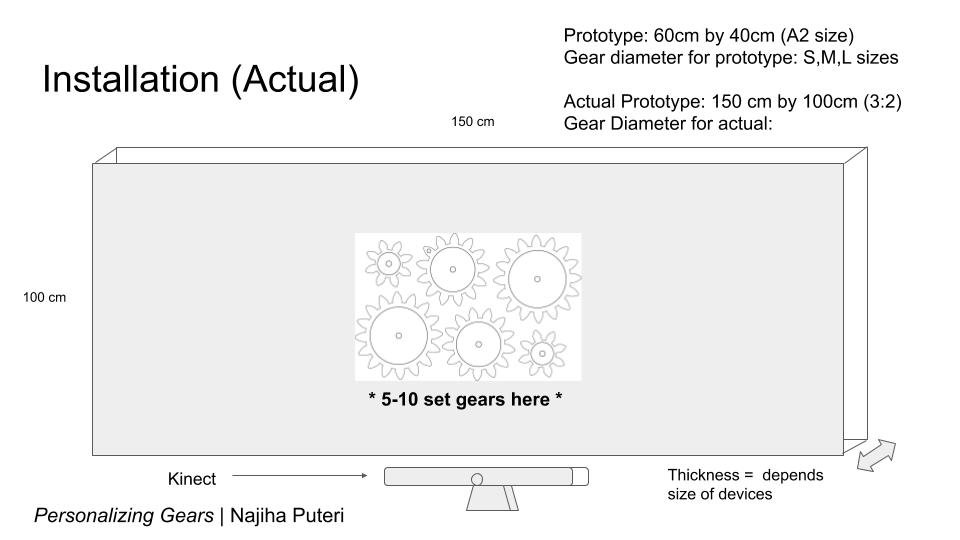
In terms of the progress I’ve made, for my gears aren’t very significant or substantial, as it was before recess week. I’m building a larger prototype with more gears and servos on them, the only difference is the use of a larger size board for support.
I haven’t worked on experimentation just….yet. A bit reluctant about exploring what to work on with the current gear situation. However, these videos above are some potential ideas/inspirations to get me going.
1. stimulus- conditions determine behavior
a. potential origins of movement
b. the door is immobile, in opposite of 3 shapes
c. Therefore, this makes 3 shapes as origins
2. Successive movements without contact
Interpreting movements as actions of persons
” Interpreted the picture in terms of actions of animated beings, chiefly of person” ”
” The way in which the actors are judged is closely connected with this attribution of origin ( appearance, size?) It is held that this method is useful in investigating the way the behavior other persons is perceived”
In relation to gears, we can link this to the movement of gears.
Perceptual Causality an Animacy
INTENTION DERIVED FROM MOTION
1. Movement of items = alive, goals, intentional states such as desires ( for eg large triangle want to catch small triangle)
2. The ability to perceive causality from simple motions displays emerges before infant have learned language – could this be an inborn trait?
3. .”…a property of animcy also appears to be perceived in simple displays” => Gears should be made simple, in order amplify the trait/behavior you want to show audience => perception people make would be more accurate
4. Add on to 3, Michotte suggested simple motion cues provide the foundation for social perception (how people perceive social situations) in general
5. Temporal Contiguity & Spatial Proximity produced phenomenal relationships among geometric figures


The following are some pointers that I’ve read from the two readings, and some basic understanding of what I learnt from gears.. It may help a lot in terms of the techinical parts of how gears rotate, and “rounds” they make – depending on the way I code the servo attached to the gear, through arduino.
Technicalities on how gears function with one another
Gear ratio is the same as speed ratio
Gear ratio – speed out put/ speed input
speed output is gear that is driven
speed input the the gear that drives other gears (initiate)
Number of gear teeth determines how many revolutions are made for itself and other gears, and in calculating gear ratio
Eg the gear ratio of Gear 1 with N: 8 and Gear 2 with N: 16, with Gear 1 as input gear, gear ratio of both is 2. This is because Gear 2/Gear = 16/8 = 2
rpm = revolutions per minute
can find out what is the RPM by …
Reading on An Experimental Study on Apparent Behavior by Frietz Heider & Marianne Simmel
1. stimulus- conditions determine behavior a. potential origins of movement
b. the door is immobile, in opposite of 3 shapes
c. Therefore, this makes 3 shapes as origins
2. Successive movements without contact
Interpreting movements as actions of persons
” Interpreted the picture in terms of actions of animated beings, chiefly of person” ”
” The way in which the actors are judged is closely connected with this attribution of origin ( appearance, size?) It is held that this method is useful in investigating the way the behavior other persons is perceived”
In relation to gears, we can link this to the movement of gears.
Reading on Perceptual Causality and Animacy Brian J. Scholl and Patrice D. Tremoule
1. Movement of items = alive, goals, intentional states such as desires ( for eg large triangle want to catch small triangle)
2. Funfact: Ability to perceive causality from simple motions displays emerges before infant have learned language – could this be an inborn trait
3. .. a property of animcy also appears to be perceived in simple displays => Gears should be made simple, in order amplify the trait/behavior you want to show audience => perception people make would be more accurate
4. Add on to 3, Michotte suggested simple motion cues provide the foudnation for social perception in general:
5. Temporal Contiguity & Spatial Proximity produced phenomenal relationships amonng geometric figures
6. Intention derived from motion
____________________________________

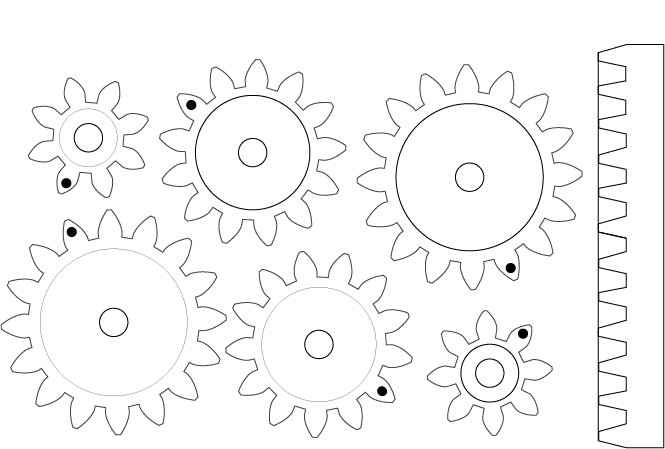
These are the outlines above edited in Adobe Illustrator – used for lasercutting. I went on GearsGenerator to generate these images and imported them on AI to prepare them for lasercutting. The materials to be used acrylic and plywood – which were samples from previous projects. This helped a lot in reducing unnecessary costs to begin the prototype testing – it was simply a means to see whether the gears bite well with other, and to also see whether it is possible to put materials together. This dual effect of combining materials worked! I had to use water-based glue or wood glue to keep them intact.