
Pitch:
For the semester project, I wanted to deal with the idea of manipulation. Manipulation is one of the family issues I wanted to address for my FYP. I thought of using puppetry as I was inspired by Wolfson’s Giant Fast-Moving Puppet. Since the movement of puppets are controlled by human. It is to show a metaphorical example of manipulation.
Process:
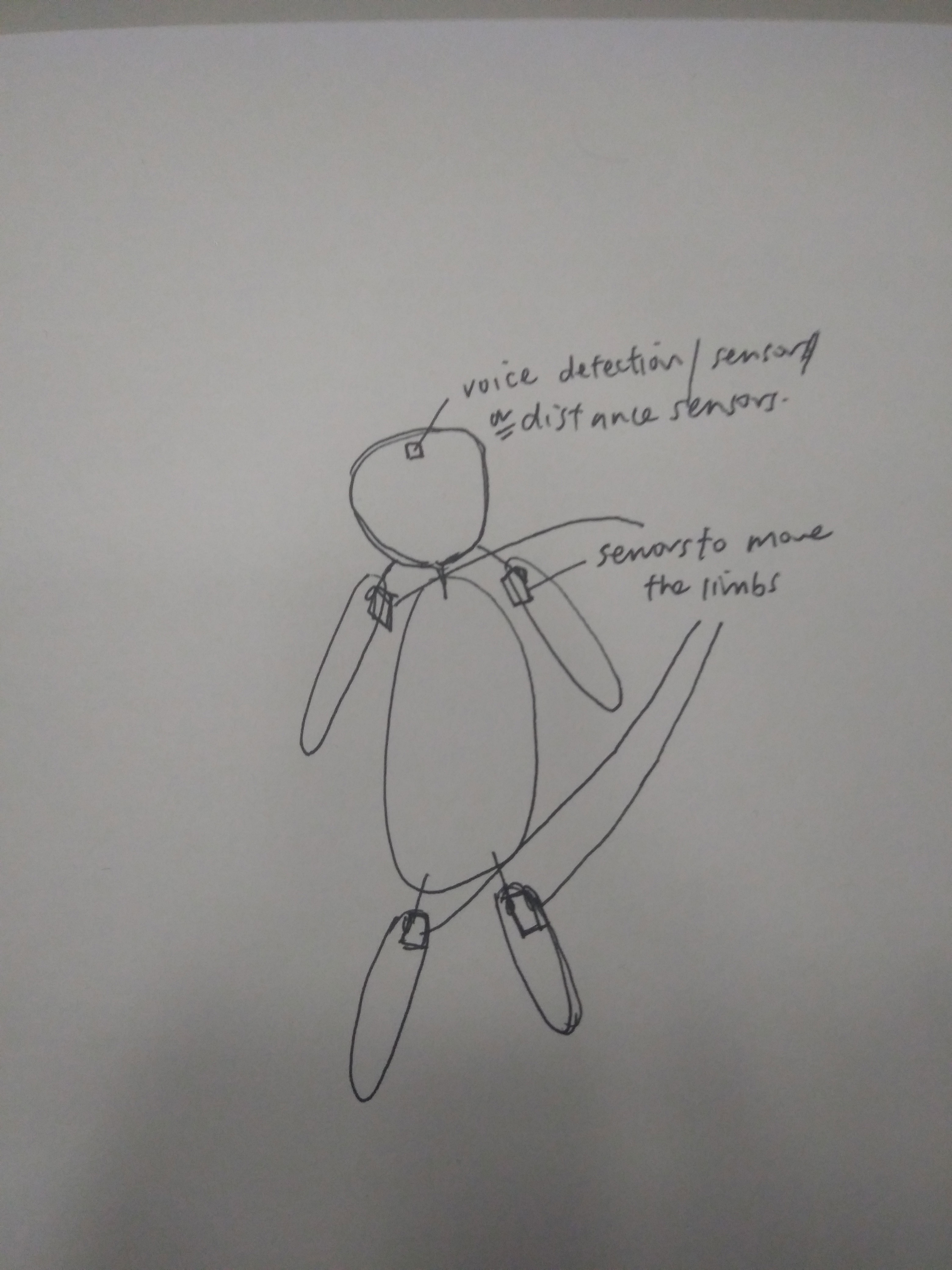
I was thinking of using voice recognition sensor to move the puppets with servos. However the complexity of it would require me to do continuous testing and it may not detect the keywords as smoothly. I decided to use either a PIR sensor or a distance sensor to trigger the servo sensors to move the puppet.
I sketched out the puppet to visualise how I wanted it to look like. I also had to plan out how to sew the different parts so that when I join them together it would move like a puppet. The next thing was to think of the materials I wanted to use to create a puppet.

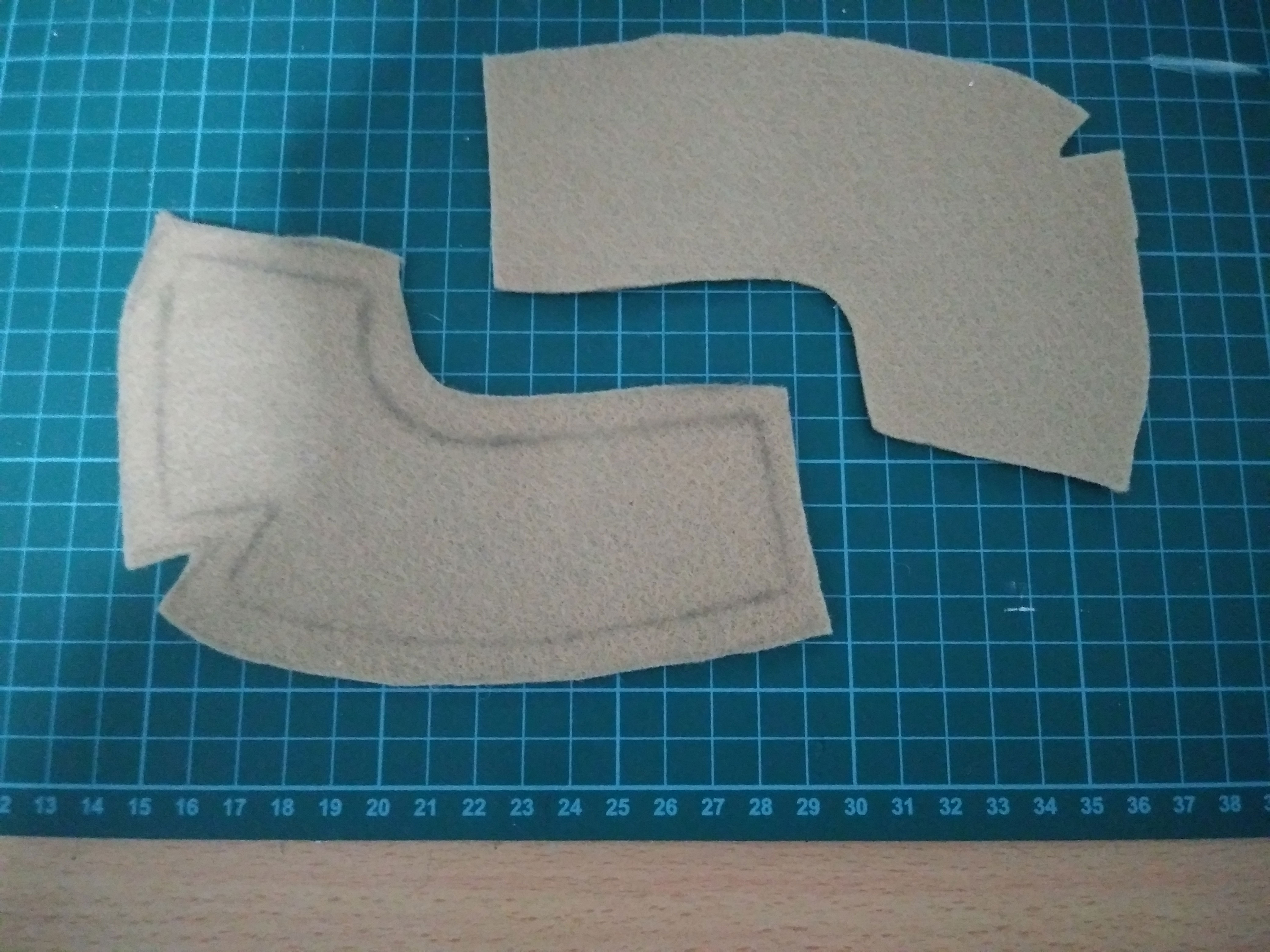
After researching on the types of materials required to create a doll puppet, I decided to go with brown felt fabric for the body parts and black yarn for the hair. The doll clothes was just normal fabric with a touch of Peranakan style which represented Singapore context.
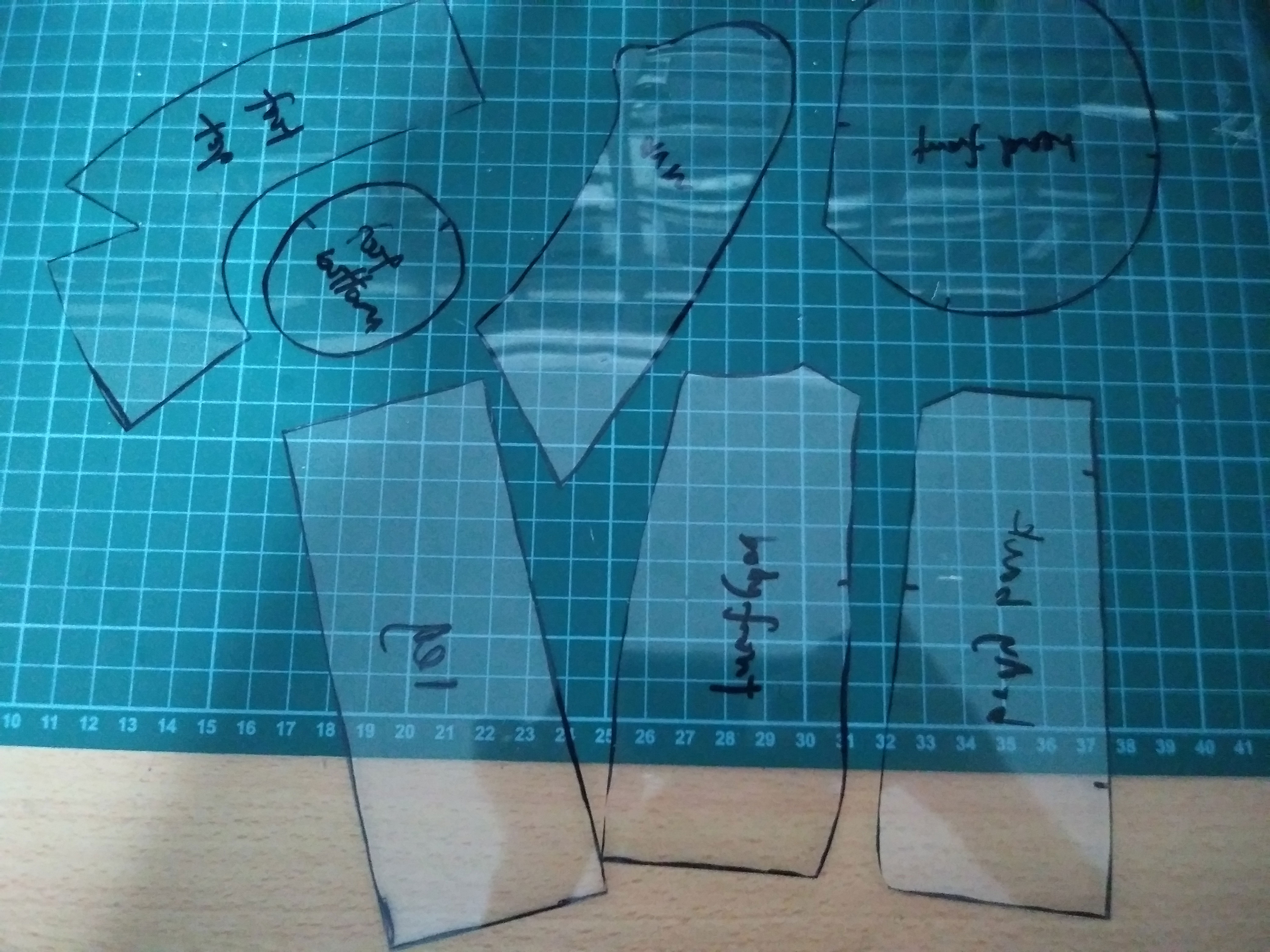
I cut out the different parts of the puppet parts on a transparency so that when cutting out on the felt fabric it would be easier to trace out.
The sewing of the doll was the hardest as I had to re sew quite a number of times to make the thread less visible and tight so as the cushion inside would not come out.

Attaching the different parts of the doll together with thread. (below)

The first round of sewing was just making the doll as it is without having any joints that would allow it to move freely.

I sketched out how the doll will look like with joints so that I can visualise it.

I was thinking what kind of material would allow the joints of the doll to make it move like human joints. After consulting a few people I decided to go with keychains.


However the downside of using keychains is that after multiple testing with just servo motors, the thread would come off resulting in a few keychains hanging loose from the body parts. The head of the doll did not move as I wanted when I was using the keychain. I decided to use buttons as joints. The effect was what I wanted where the doll’s head moved left and right more loosely.
The sewing of the doll’s clothes was a challenged. I had to measure out the height of the doll and attaching 4 separate pieces together. I did not want the frills of the cloth to affect the movement of the dolls and had to try out different sewing methods before finding the best way to prevent the threads from coming off.


I needed to test out the movement of the doll physically before adding in the mechanics. It was to see how much it would move and how long the strings needed to be before the limps can move up and down.
I tested out the mechanics using a small servo motor to see whether it was able to pull an object up. There were a lot of challenges because when I was holding the servo with the object, it kept moving around. I attached the string to an ice cream stick and cut a hole which was longer and wider than the stick. This enabled me to have the servo be placed in a fixed position and replicate the same thing three more times.
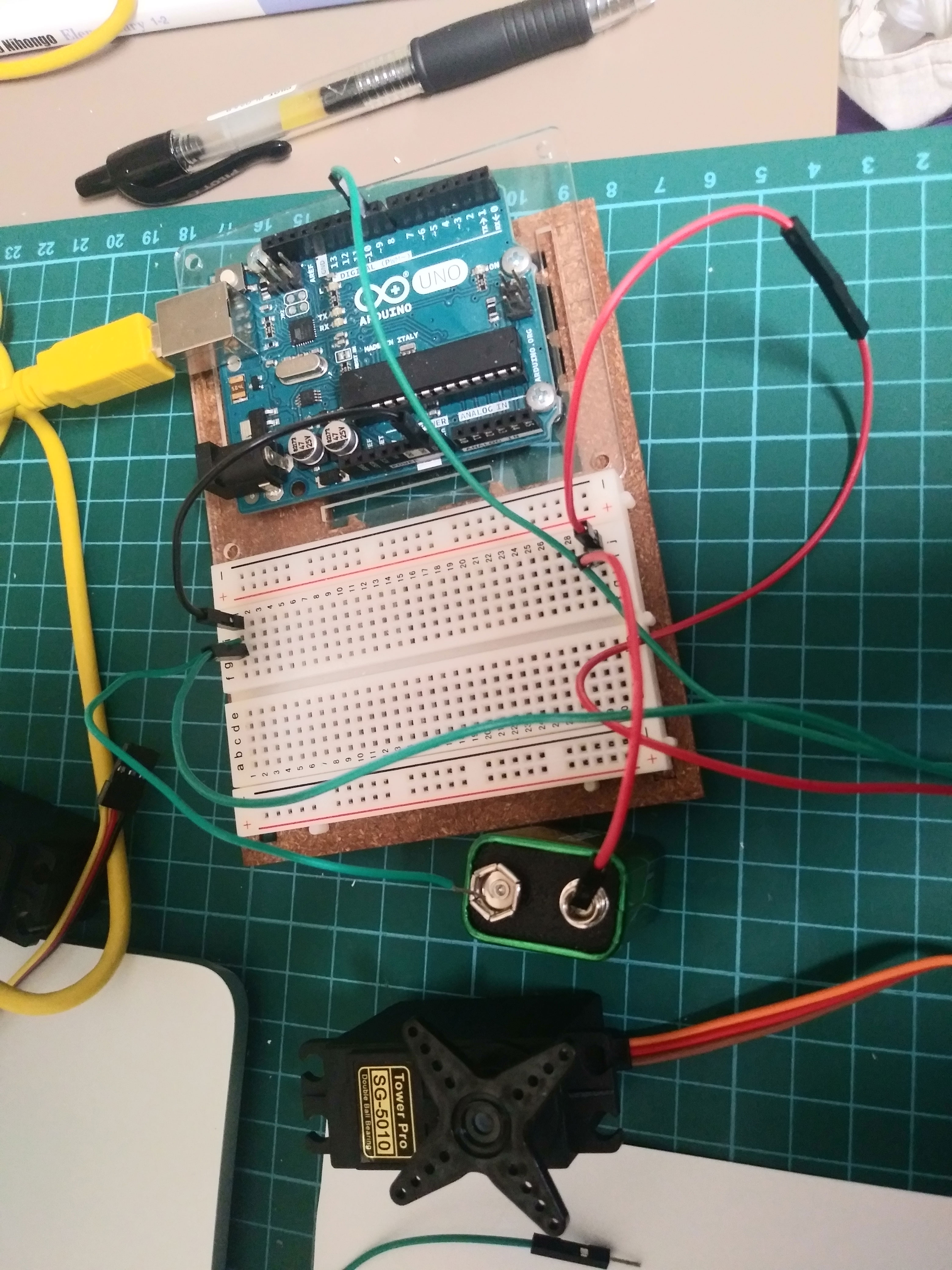
I tested out the ultrasonic sensor as it’s own and see how far of a distance I wanted it for people to interact. After testing, I had to figure out how to combine both the distance sensor and servo motors together. At first I used buttons to control the servo motors and then changed it to the distance sensor instead. It worked well with 1 servo motor and continued to add more of them. It was then I realised that there was not enough power to control 4 big servos. I added a battery to the power instead of using an arduino. It worked as intended.
After that, I attached the doll to the servo motors. I had to measure out the box where the doll was being placed in so that the doll can move.
I was testing out the servo motors and distance sensors to see how much the doll will move. I wanted to see how close a person have to be to the doll before it will move. I had to make quite a number of changes before I got the ideal distance I wanted.
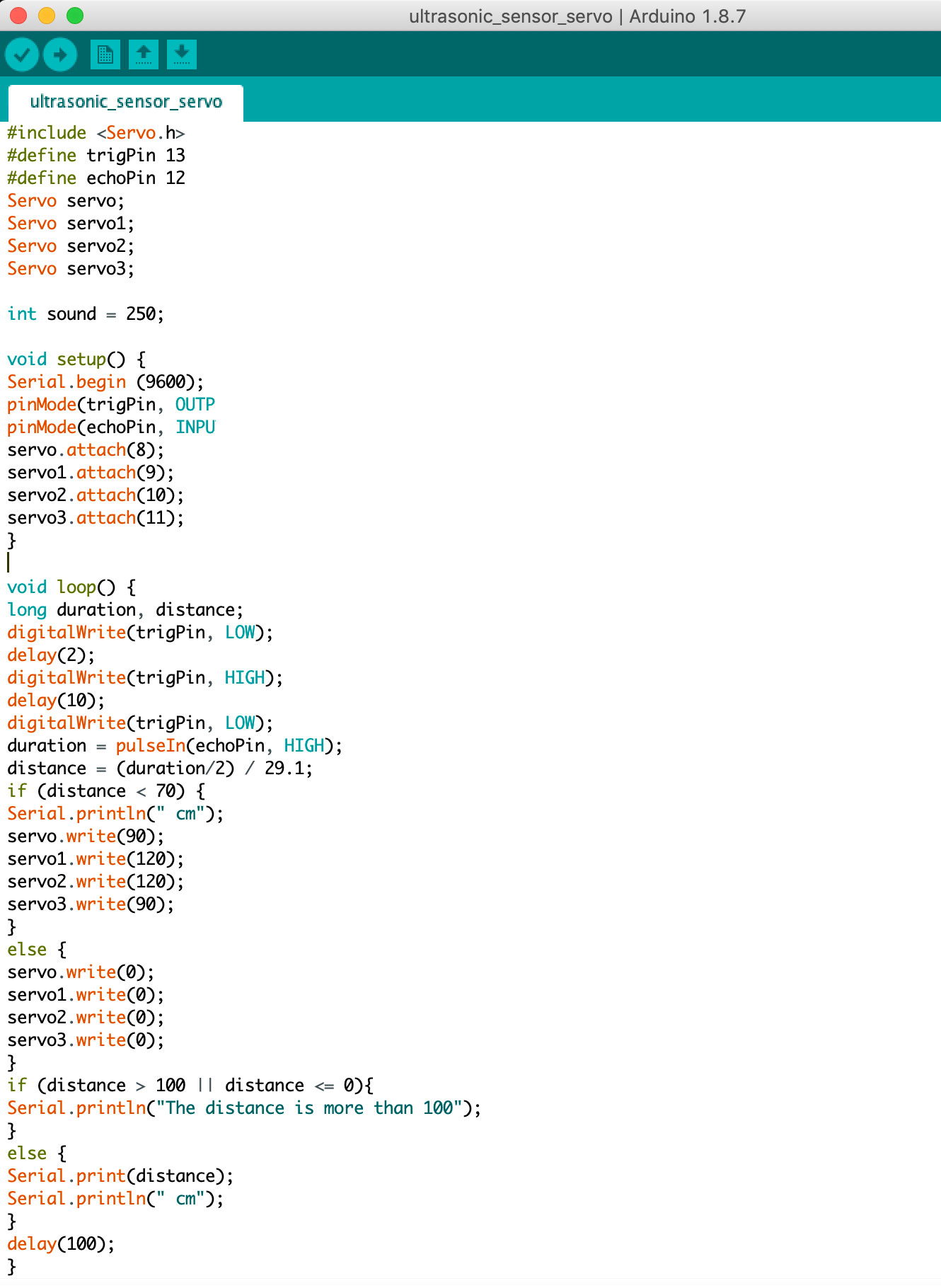
Final Coding
People interacting with the doll
Final Video:
It was interesting to see how different people reacted to the doll as I did not expect the doll to scare some of them. I was wondering why some of them got a shock and asked them about it. Some mentioned that they did not know it will move when they were close to the sensor. Others was afraid because when their friends were trying out, the sound from the servo motors made them jumped.

Recent Comments