
Group members: Rochele, Xuan Fei, Kou Ying
We had our ideas presentation the other day which three of us get to propose three different ideas. My initial idea of playing with mirrors/reflective glass was not good enough. People may not be able to relate to the stories of other people and the purpose of this project is to involve the viewers into the world of the object, by using sound.
We decided to scrape our ideas altogether and went to explore around. After a good ol’ 30 minutes, we settled on the idea of “talking bins”. 
We thought of using sound effects such as scream, shout, cries to express how a trash feels when it is being thrown into the bin. This helps to raise environmental awareness. For instance, people will be more aware of how they handle waste or even cut down on the amount of waste they throw away. Michael told us that we should make the sound message clearer in order to communicate our main message to the public. Therefore, we plan to incorporate messages like “Thank you”, “Well done” for people who disposed the trash into the right bins, while messages like “Oh No!”, “What are you doing???” for every wrong trash being placed into the bin, together with the sound effects.
The final idea for this project is to use proximity sensors to detect objects that are being thrown into the bins. In order to do this, the bins will be remodelled. For instance, the opening of the bin will have a slope so that the rubbish will fall towards a certain direction and hit on the metal plate in the bin. The metal plate is made of alloy materials, with spring coils underneath for the convenience of heavier objects. The rubbish will slide across the plate so that it can be detected by the sensors on the opposite side.
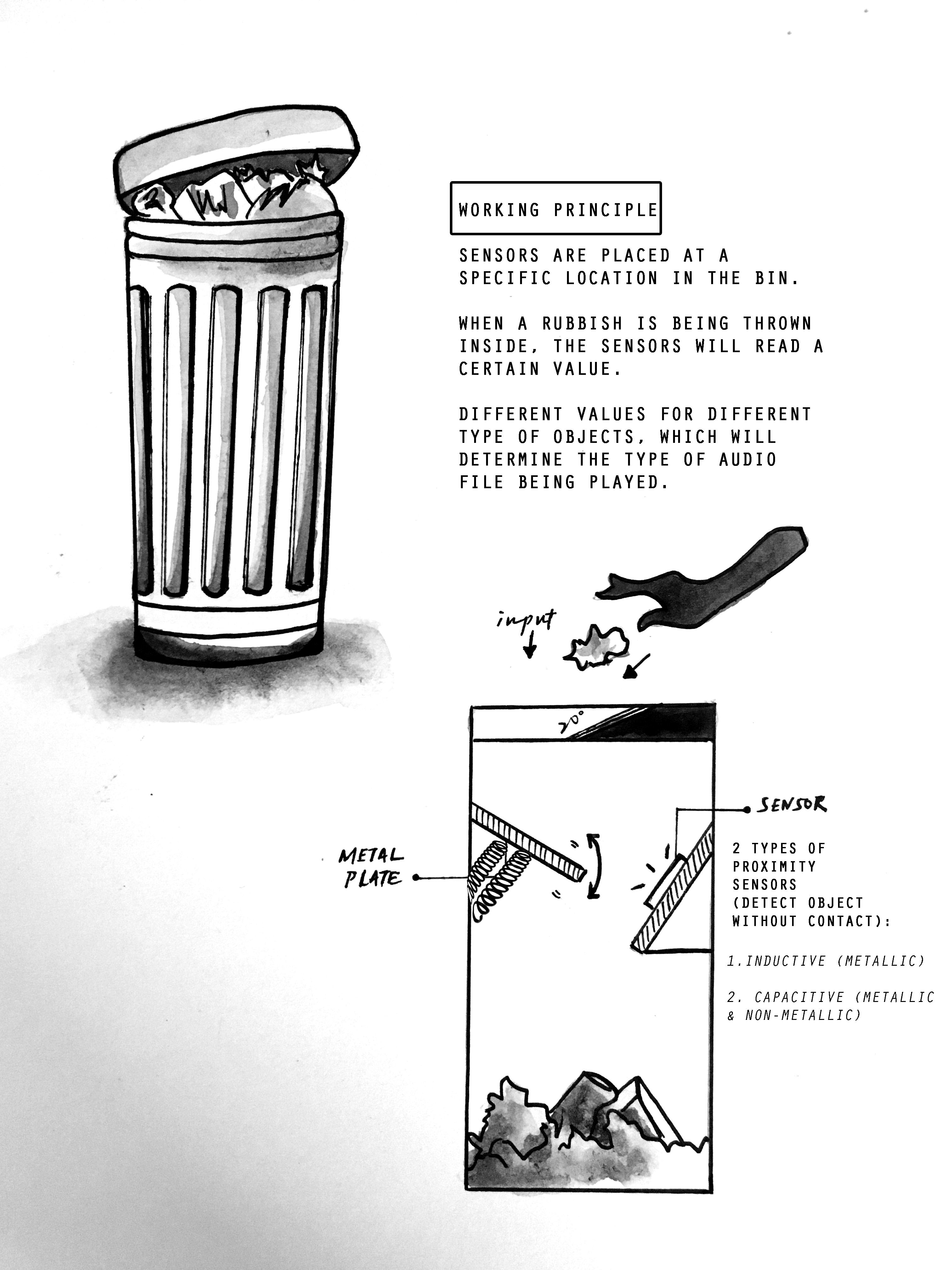
A brief description of the technical part:
The components involved are Raspberry PI, Arduino Uno, Inductive Proximity Sensor (IPS) and Capacitive Proximity Sensor (CPS). By interfacing Raspberry PI with Arduino Uno, analog values from the sensors can be read. There is a range of value given to each type of object –
EXAMPLE
| PAPER (VALUE RANGES FROM IPS;80-100, CPS;100-120) | IPS = 90 | CPS = 110 |
| PLASTIC (VALUE RANGES FROM IPS;0-50, CPS;150-200) | IPS = 10 | CPS = 200 |
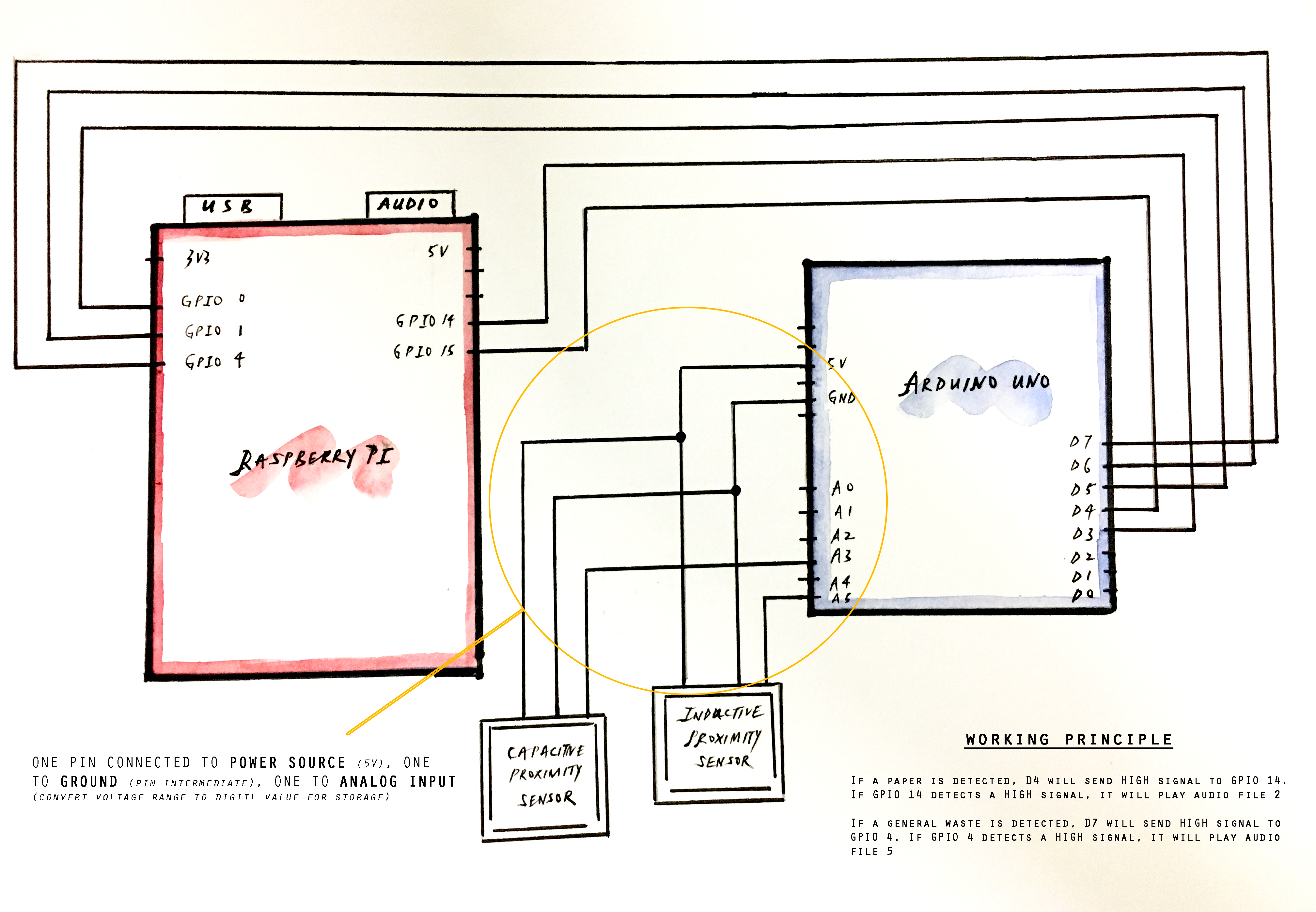
Each type of object has its own pin (D1,D2,D3, etc) on Arduino Uno so that signals will be transmitted to Raspberry PI from each respective pin. When high signal is detected, specific audio file will be played.
EXAMPLES
^ when a can is being thrown into the correct recycle bin
^when a can is being thrown into the normal bin