Documentation Links
Prototype 1 | Prototype 2 | Final Prototype
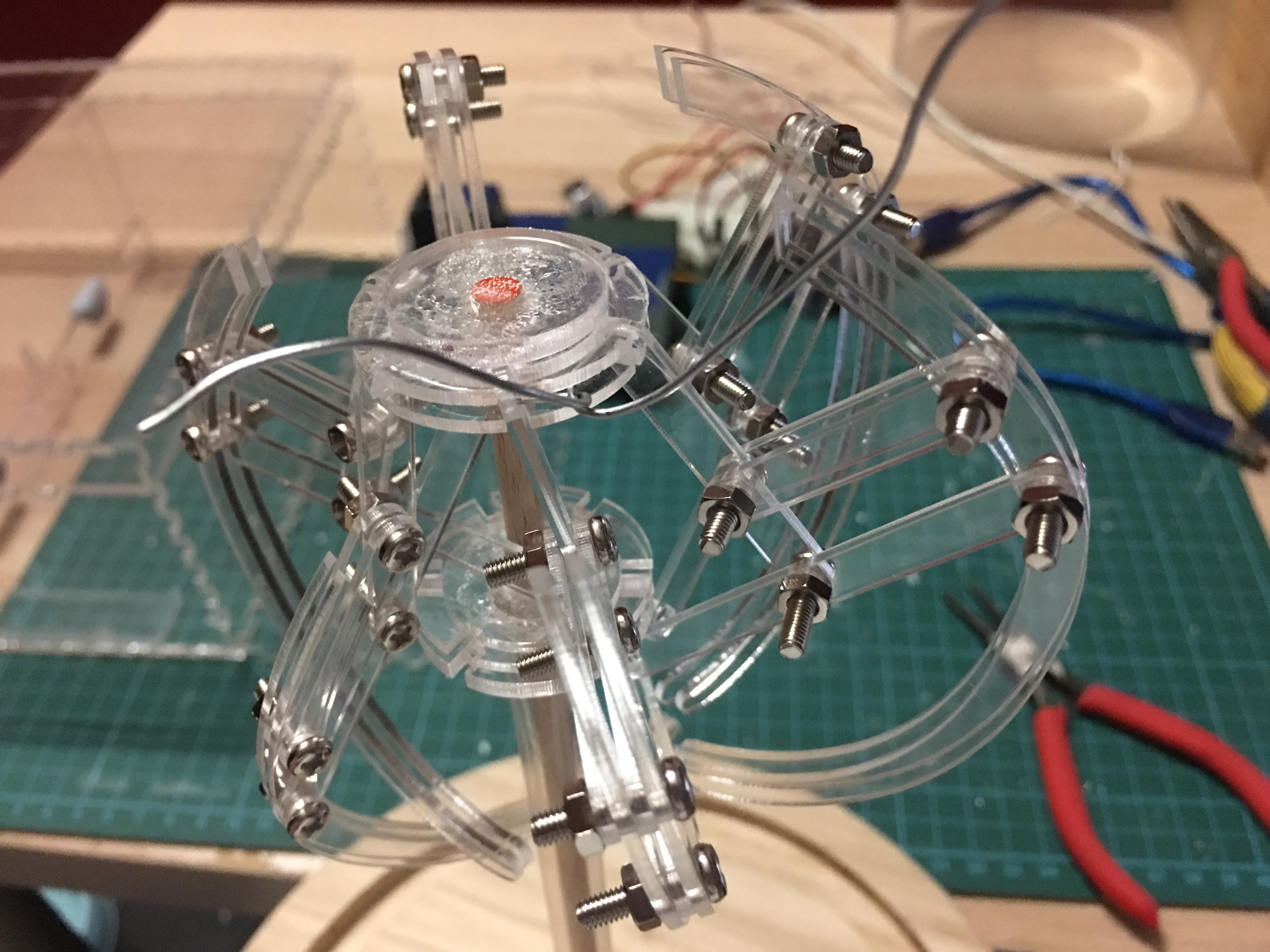
Final Jellica Prototype
Progress from Prototype 2
In the morning of my scheduled final laser-cutting, I received news that the machine was down. Thus, I booked another slot the next day and kept in touch with several people for updates regarding the machine. Even though there were some hiccups that happened when I was laser-cutting, I managed to get all the parts ready (after two hours of trial and error with the work-study).
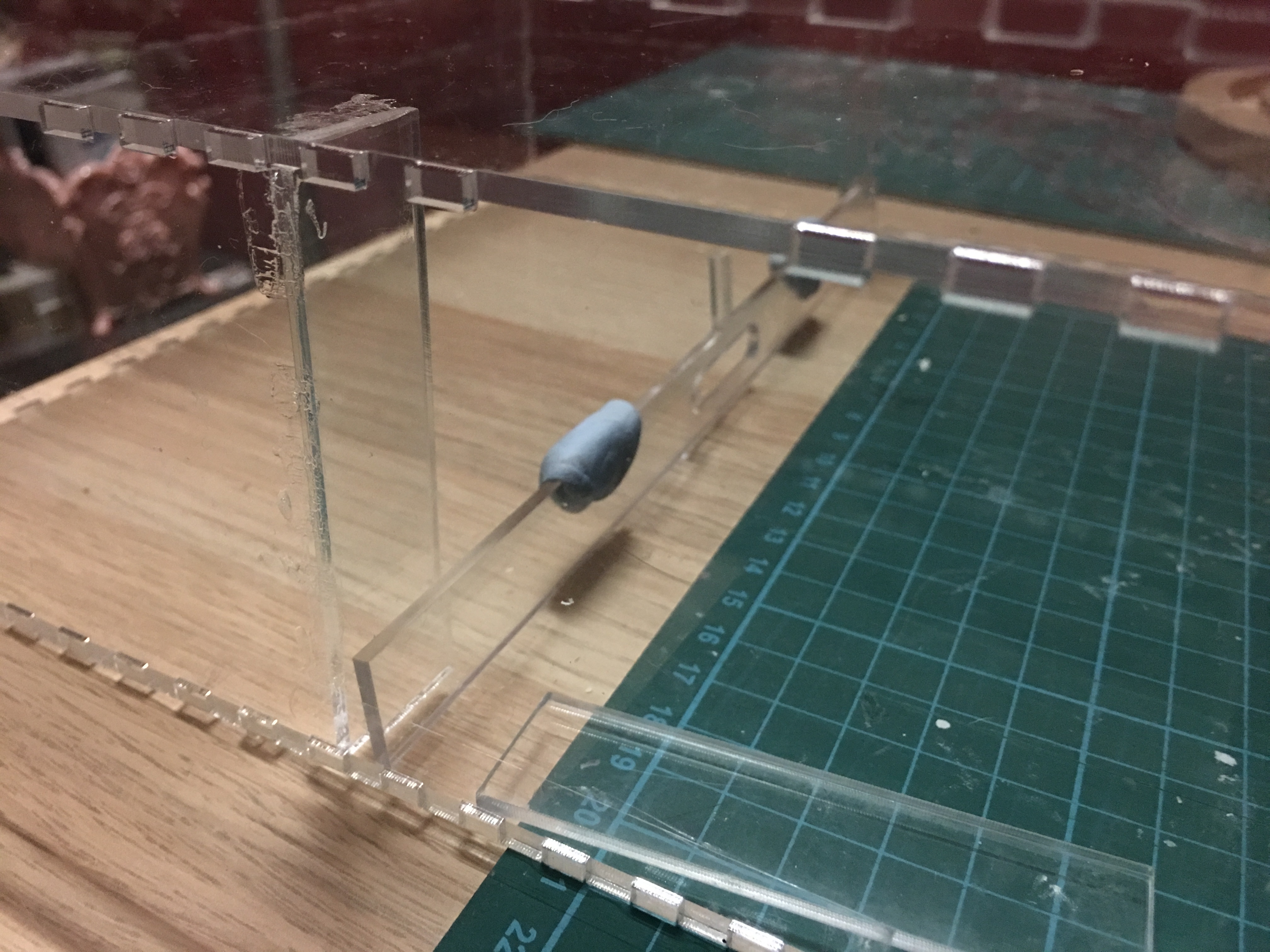
 Since I was using a 180 degree servo, only half of the linear mechanism was used. Hence, I had to apply some load onto the bar for it to move downwards and not get stuck at a diagonal angle.
Since I was using a 180 degree servo, only half of the linear mechanism was used. Hence, I had to apply some load onto the bar for it to move downwards and not get stuck at a diagonal angle.
I had also purposely created a smaller whole on the upper disc and a slightly larger hole on the lower disc so the wooden pole would stick to the upper disc better.
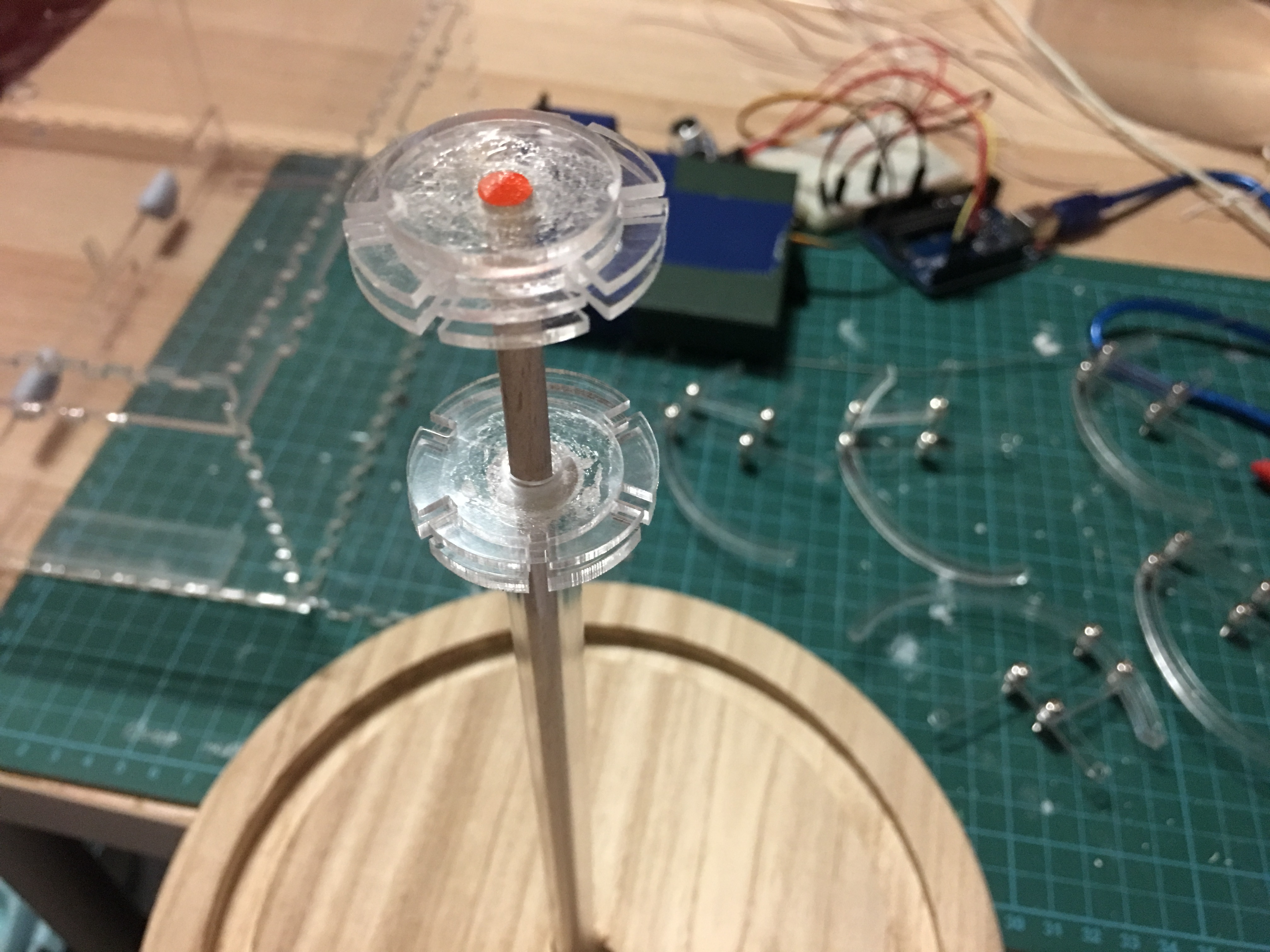
Ample of space was given between the disc to slot in a thin wire which was used to hold all six arms together.
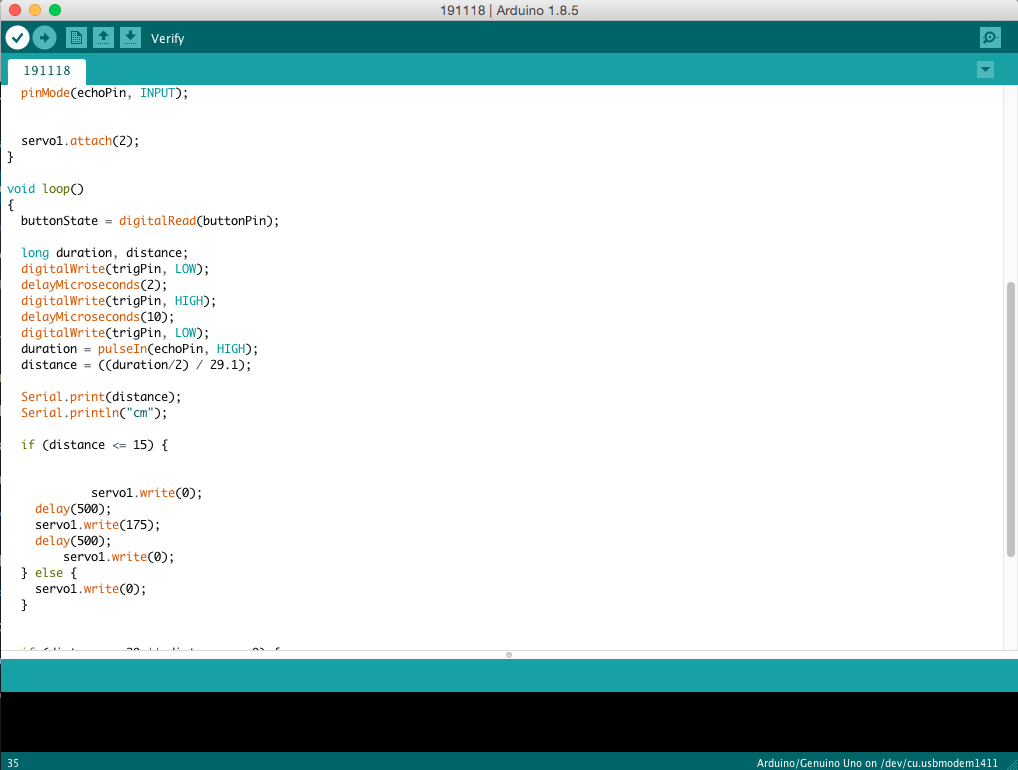
The Code
The Arduino code was pretty simple as well. Jellica will move at a slow pace by default but when the Ultrasonic Sensor is triggered, it moves faster. Since I wanted the LED lights to be active the whole time, I used two arduinos so the LED does not have to wait for the servos to finishing looping before lighting up.