

Project done by: Emma, Wei Lin, Natalie, Wan Hui
Context
In our current pandemic situation where loved ones cannot easily be with each other physically, our device (and setup) aims to stimulate your loved one’s walking movements in your room. It seeks to highlight distant bodies through the absence of the body.
How the device works
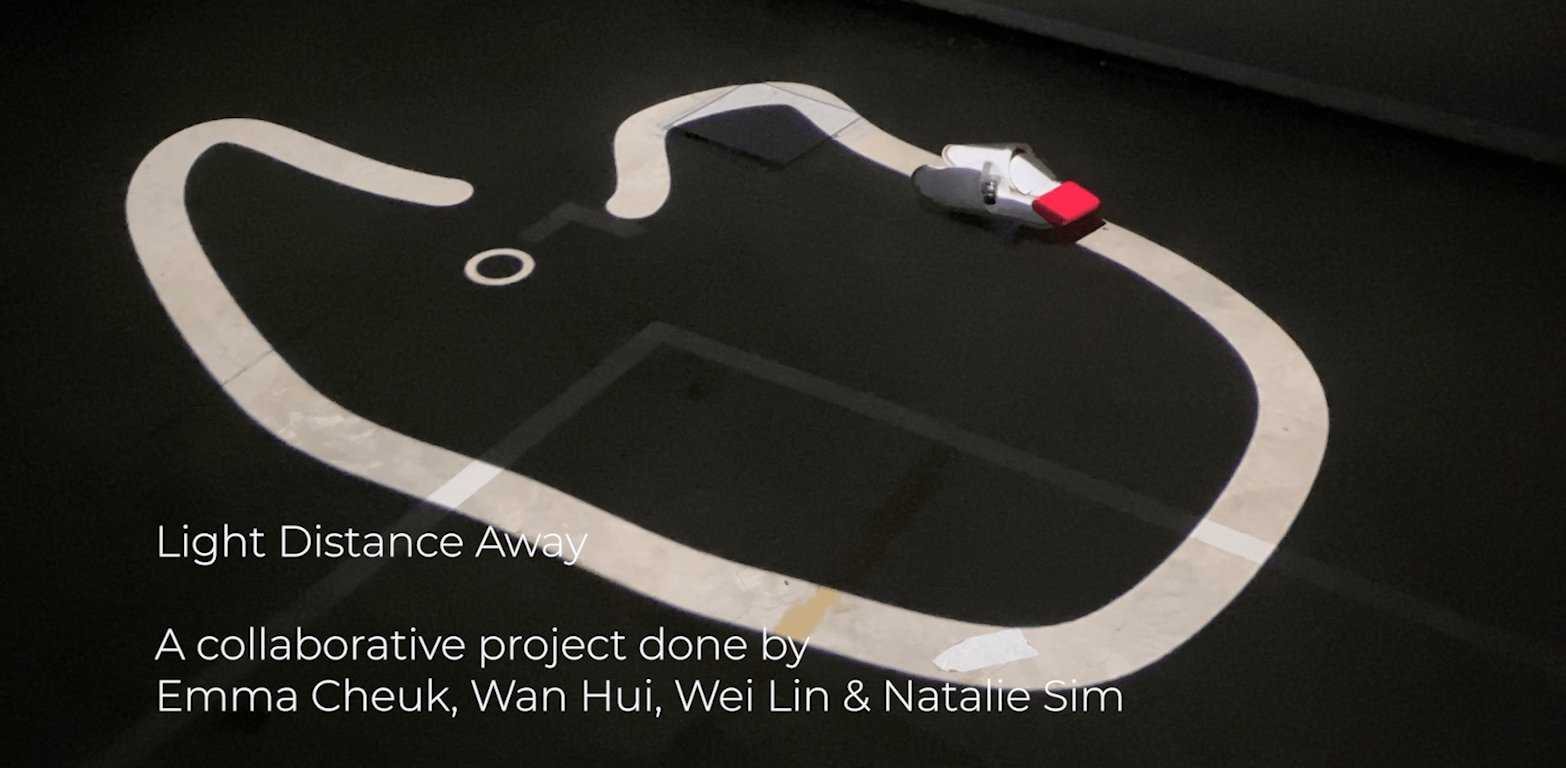
Walking around the space, one’s footsteps are translated into a path of light in a distant room. In both rooms, a path generated by your loved one begins to form and a pair of shoes follow suit. Watching the shoes move, the distant movement is transported by light to the room one is currently present in. The presence of another body either haunts or comforts us through its absence represented by the shoes. The physical distance between is shortened to a lighted path as both distant bodies now move together in their respective rooms.
Light Distance Away device (footwear)

DEMO
Hardware (per set)
-
- DC Motors x 2
- Wheels x 3
- Light Dependent Resistor x 4
- DF Robot Motor Driver Shield x 1
- Arduino Uno x 1
- Pixy Camera x 1
- Projector x 1
- Slipper x 1
Software
-
- Arduino IDE
- Processing
Tool
-
- Soldering Equipment
- Sewing kit (to stitch slippers together)
SETTING UP THE PIXY CAMERA TO PROCESSING TO PROJECTOR:

SETTING UP INTERNAL PARTS


PROCESSING TO PROJECTOR: testing best fit curve
SETTING UP THE ARDUINO CODE FOR MOTOR
Challenges
-
- Choosing right equipment to use : Motor Driver
- Indoor Positioning system
- Assembling
- Wires keep breaking
- Results unpredictable as bare wires were touching each other. Had to tape over wires after soldering to ensure that they would not touch and wrongly close the circuit.
- Power management. Battery power affecting LDR sensing as well as speed of the motor
- If motor too fast, will nyoom past the line
- If too slow, it wont even move the shoes
- Processing code – sharp edge smoothing
- Wheels losing friction and gliding
- Quick solution was to tape the wheels with double sided tape
- But not a permanent solution as once dust collects on the tape, it will lose its friction again
- And if the tape is too strong, then the friction will be too much for our wheels to move
- Space limitations
- Ideally wanted a more complete set up, with bedroom furniture and more walk space
- However, only truss room was the best choice for us as we needed a dark room where we could easily mount our short throw projectors and pixy cam from high above
- Had to share truss room with other projects, so markings on the floor made with masking tape hindered our robot at times
Final Combined Code
Links to Documentation