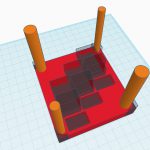
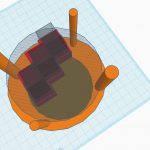
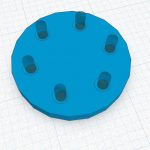
Our Initial idea was to have a head to bang onto the wall/table just because it will be sadistic and funny to watch. So our basic idea was to use strings and wires with plates for the head to move in any direction like to swivel around as it adds to the eccentric aspect of our idea. We did lots of trial and error as we were not sure what could work or not. First, we 3D modeled the servo mount which will pull the strings.

Meanwhile, we also went to look around in carousell for heads which could fit into our project nicely and is near for us to purchase them so we asked countless of dolls/plushie sellers on carousell


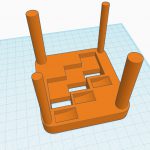
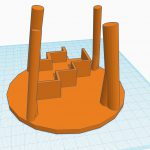
Then we realized that a square base we did previously was relatively inefficient as the part of the servo that spins was not centralize within the mount so we re-designed the 3D model.
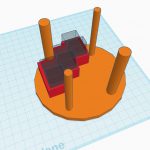

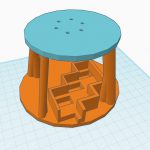
After which, we did experiments with the plate for the “Neck” of the doll.



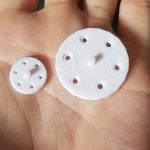
 One spring in the middle was too flimsy until we added strings
One spring in the middle was too flimsy until we added strings
 emulation of 3 motors and movements, We were impressed.
emulation of 3 motors and movements, We were impressed.
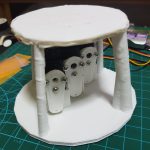
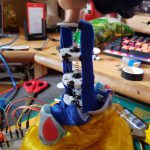
 And we fixed everything together and tied it with fishing lines.
And we fixed everything together and tied it with fishing lines.
With the setup above, the doll head was relatively heavy when attached to it,so it does not come back to the standing position so we modified the system with some blue felt to strengthen the system by a bit.

and then after some coding……