After the Study model of the last part, where I stopped at the lever system and realize that it is not as strong as it should be, my improved method is to use 2 servo to do the same action, After a long time trying, I found out that the overall height of the servo will still be as high and as big as a standard MG 966R servo motor, and the MG966R will provide significantly higher torque than 2x SG90 at roughly the same height.
So my new solution to this is to use the heavier and stronger MG966R as the feet motor. Since they are relative big, I need a system to fully utilize the height and the movement of motors to make it as compact as possible. Since the center of the turtle shell is usually the tallest part, it make sense to stack the first rotating joint (the shoulder) above each other to greatly reduce the total size of the turtle by making it slightly taller.
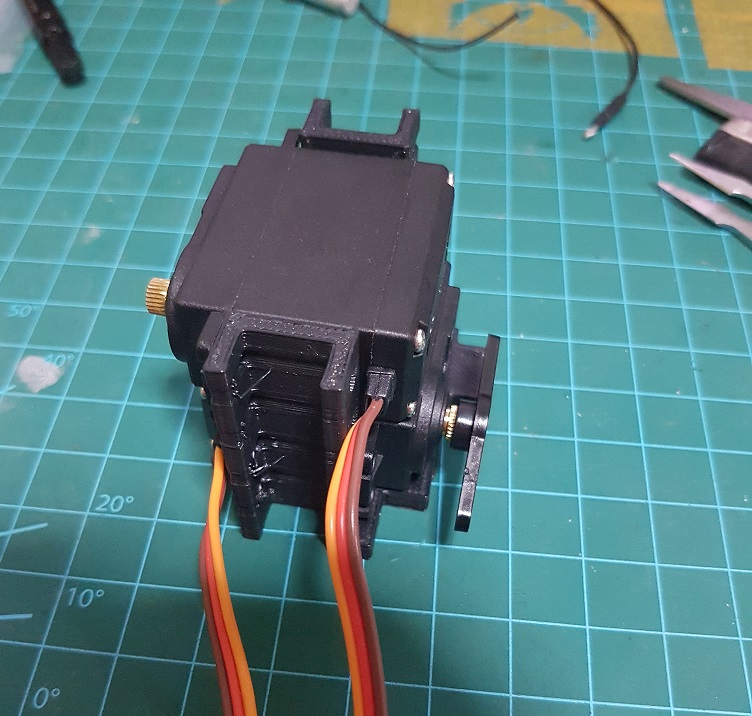 Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.
Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.
Improved prototype of the system which reduces the shakiness of the Shoulder Motor(which is important as Shoulder is the first joint, if this vibrates, it will be amplified become very obvious in the feet.)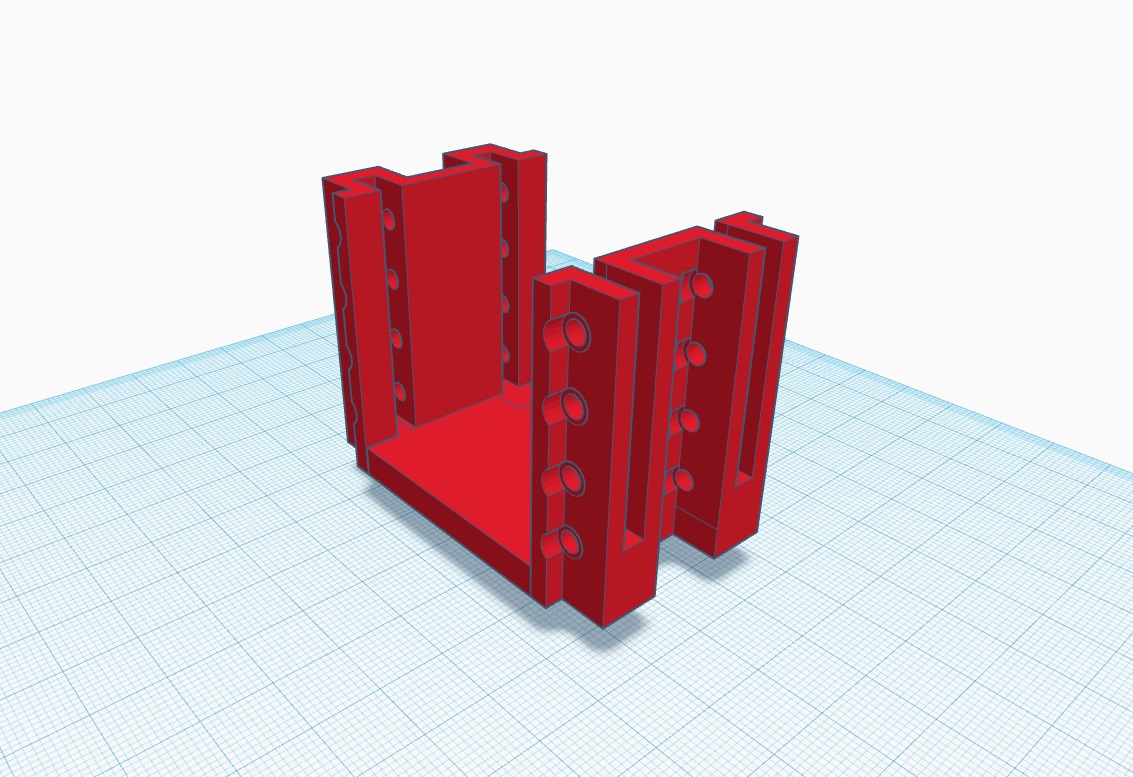
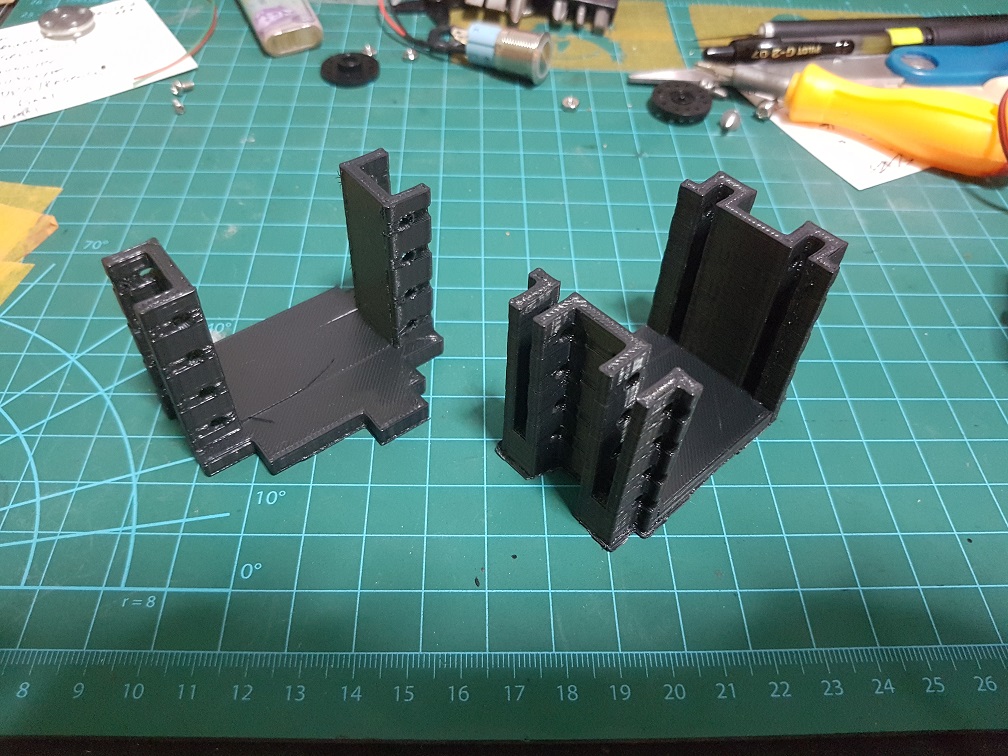


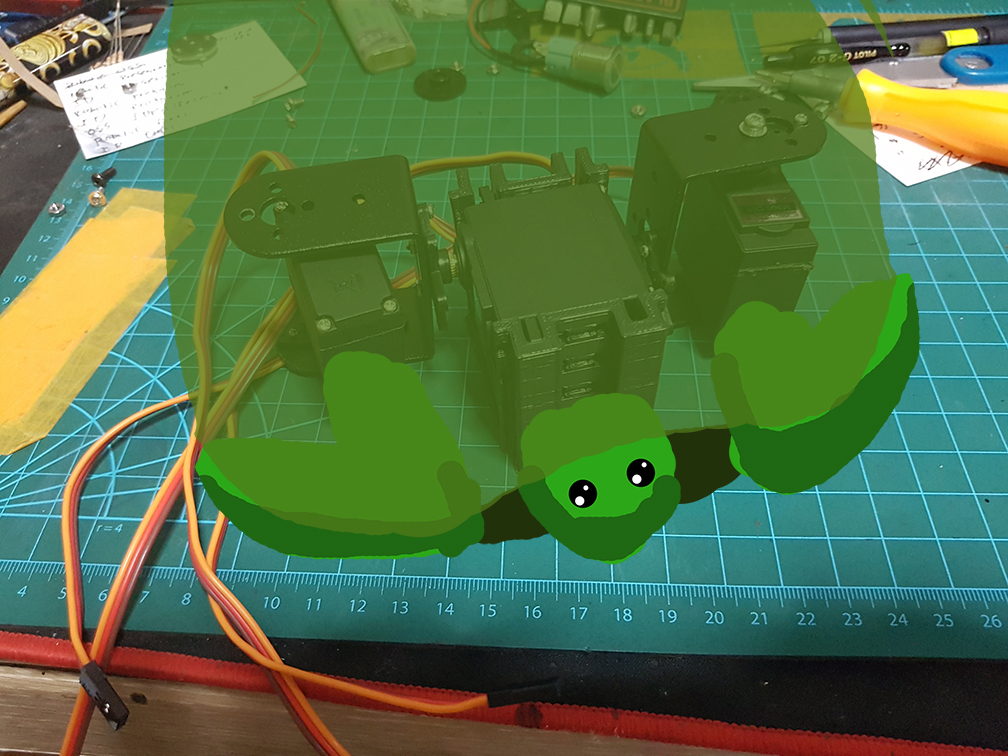
 after countless of testing to get the perfect balance of height in horizontal and vertical, this system should be able to progress into what I will use in the final, there are still improvements to be made in the base height of the Shoulder Motor as when the Arm spins, it will still touch the ground.
after countless of testing to get the perfect balance of height in horizontal and vertical, this system should be able to progress into what I will use in the final, there are still improvements to be made in the base height of the Shoulder Motor as when the Arm spins, it will still touch the ground.
for now, it probably can walk and hide like this..
Next up is to further refine this system and find the suitable system for the Elbow joint.