Few weeks ago, Explorer-27 was a short, dog-sized robot:
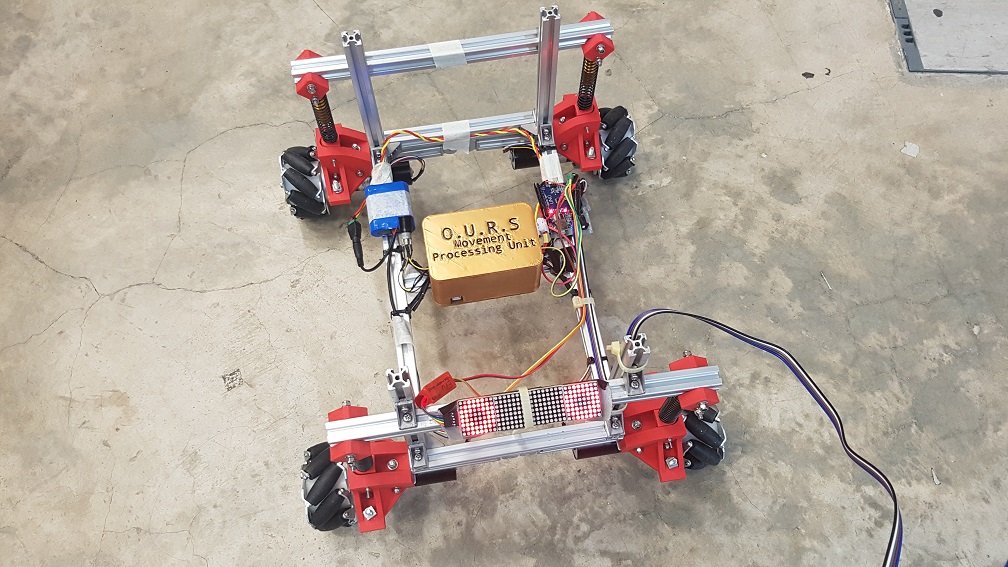
and after weeks of further development..
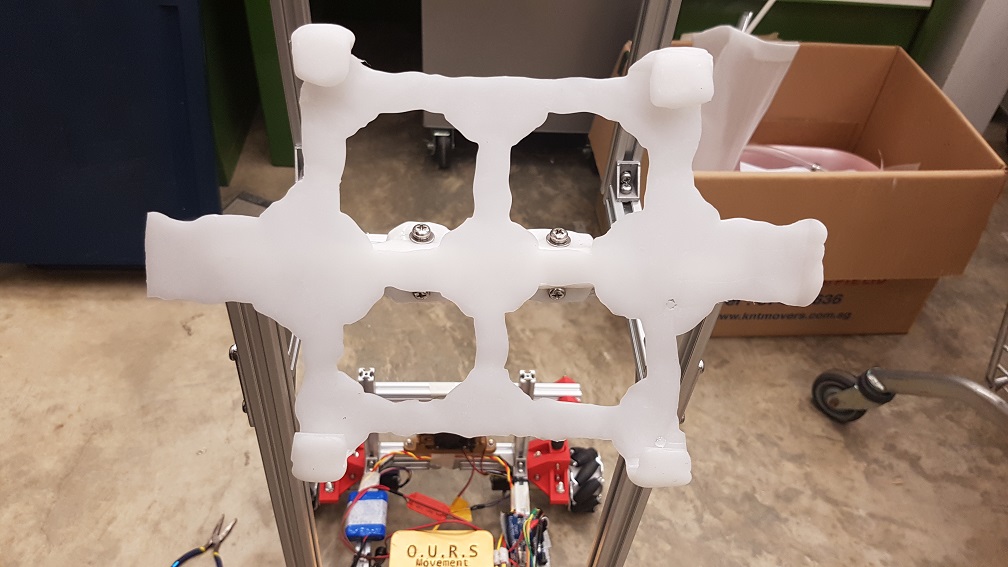
fast prototype using sticky plasty to form a tablet holder.





Afterwhich, I also built the new paper model dog head(Husky) 
And installed the LED eyes into this new paper Husky head.
Re-code the UI in Unity and also connect it to the Arduino system.