The field of Bio Inspired robots is too wide and I think that we will benefit more by understand the different ways of how we could learn from the nature rather than narrowing the scope down and go deep into one of the sub division of bio-inspired robots.
The File size for the presentation is too large so I screen recorded the presentation in presenter’s view.
What is Biological Inspired robots? First lets break the words into pieces.
Biology – The natural science of studying Life and Living Organism.
Robots – A machine capable of carrying out a complex series of actions automatically.
we could see that the Robotic studies has a lot to learn from the Biological side as most of the nature elements are refined through the years and it should be one of the most efficient way of doing things.
There are 2 methods from nature where robotic could potentially learn from which are
Imitating mechanisms found in nature (velcro)
Studying organizational principles from the social behavior of organisms(Swarming)
Imitating mechanisms found in nature
Bionics/Bio-mimicry(biomimetics)
In robotics, bionics and biomimetics are used to apply the way animals move to the design of robots. Bionic Kangaroo by Festo was based on the movements and physiology of kangaroos and one of the most well known Bio-mimicry of a bird was by Flying Machine by Leonardo Da Vinci
There are many different variation of the bionics which replaces missing human limbs and they try to make it as close as the real ones, by producing a joint at where a joint should be, and although it might take awhile to get used to it, the technology is getting better over time and we are starting to go past the “Replacement of missing limbs” to “Enhancing human parts” since some of the Bionics worked better than our current limbs. *360 rotation of all joint? count me in.
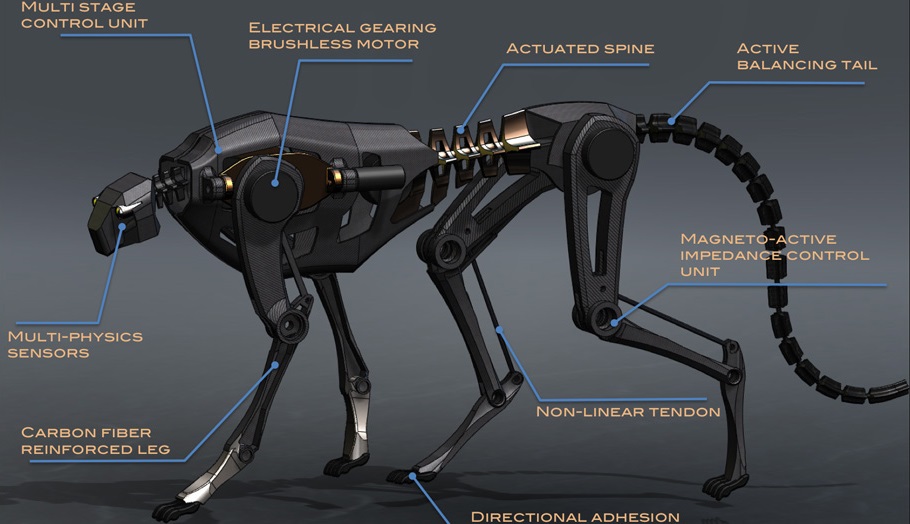
This really inspired my projects in the turtle idea the spot is also an quad-pedal robot and I really love how it moves, maybe I could incorporate the idea of it into the turtle.
Studying organizational principles from the social behaviour of organisms
From the behaviors of ants, one ant may not be much and does not do much, with simple rules given to each type of ants, a society of ants will be able to do so much more and is really efficient. Hence on the idea of collective artificial intelligence in swarming in ants, fishes or birds, we could see the potential by using swarming in robotics by using local rules and global behaviors could allow us to scale the robotic ability into a scale unimaginable to us. 10 swarming robots could work, but 10 thousands swarming can do so much more, each individual robots just have to know where its immediate neighbors are.
The studying of insects like ants could really benefit the field of science and robotics.
This remind me of something that is in Big Heroes 6
Inspiration from this?
ANTS.
DEFINITELY ANTS.
I’ll end this part of research here and if I have anything more to add, I will add them in another part afterwards.

 Notice how it move 1 foot at a time when turning and how it walks.
Notice how it move 1 foot at a time when turning and how it walks.