
Changing Project title and Styling
As inspired from the trip from Japan, I decided to change the theme/styling of my FYP from a futuristic company(Hephaestus System Link 1 & Link 2) to a Tech Company in a Cyber Punkish Futuristic world, and after giving in depth thoughts about the branding of the tech company, I came out with “O.U.R.S” the acronym for “Omni Utility Robotic Systems”. There are many reason that this will be the perfect title for my FYP because the original idea of my FYP is to build something that could help out with all of FYP student’s FYP exhibition, so “OUR” Robot fits the bill perfectly. Furthermore, I am changing the moving System from a simple robot that moves like a remote controlled car(only front and back with turn) to a Omni-Wheel System(Mecanum Wheel) whereby it could also move diagonal/sideways without changing the orientation. “Omni-Utility” could both meant Omni wheeled robot with practicality and multi-utility robots with many functions built into it, “Robotic systems” was on the same idea with the previous “Hephaestus Systems” I do not want to only create a single robot, I wanted to create a system whereby that robot is only part of the system. So Omni Utility Robotic Systems (O.U.R.S) will probably be the name for my (Imaginary) company as well as the title for my FYP.
Logo Design:

With a Picture I took in Japan, Tokyo, Shibuya Crossing as “Mood Board”
Improved Unity UI(Slightly)
 added a simple(sample) animation with the standard UI, buttons and back buttons work fine,(the actual animation is much smoother, but the GIF is slow)
added a simple(sample) animation with the standard UI, buttons and back buttons work fine,(the actual animation is much smoother, but the GIF is slow)Unity-Arduino Control
I learnt how to use unity to send Serial output to Arduino, although it was quite easy, but it took a really long time for me to figure out how it was done.
 The arduino code was written in a way that it gives multiple values in a < > bracket as start and end marker, so that it could be changed to spin the motor and sms the student through arduino in the future, example of the serial communication <255,255,255,255,(phoneNumber),(UsersMessage)>
The arduino code was written in a way that it gives multiple values in a < > bracket as start and end marker, so that it could be changed to spin the motor and sms the student through arduino in the future, example of the serial communication <255,255,255,255,(phoneNumber),(UsersMessage)>New Parts, New Systems
I had decided to build ONE robot instead of TWO robot at this point, so my total budget for building the robot just X2 instantly, this was the reason that I am changing the idea of using the kids vehicle to using Mecanum Wheel because it will be much more impressive.
 This is a 11 inch screen with HDIM driver with a separate touchpanel, however the seller sent me the wrong usb wire so I cant test the touchscreen before they replace it, however the screen works well! although it is abit small, but it is good for my budget and power issue (my robot will run with internal battery so every component used in it must have their power consumption taken into consideration before everything.)
This is a 11 inch screen with HDIM driver with a separate touchpanel, however the seller sent me the wrong usb wire so I cant test the touchscreen before they replace it, however the screen works well! although it is abit small, but it is good for my budget and power issue (my robot will run with internal battery so every component used in it must have their power consumption taken into consideration before everything.) The 2cm*2cm Aluminium profile reached and I measured the size i will probably need as the base frame of the robots. The largest single component in the robot will be the laptop which will be used to run the calculations within the robot so the minimum base size will be atleast the size of my laptop (the wheels will be protruding the frame so tha actual base will be about 15cm wider) I’ve cut the profile to form 47cm by 40cm(+~15cm for wheels) currently and I might make changes along the way.
The largest single component in the robot will be the laptop which will be used to run the calculations within the robot so the minimum base size will be atleast the size of my laptop (the wheels will be protruding the frame so tha actual base will be about 15cm wider) I’ve cut the profile to form 47cm by 40cm(+~15cm for wheels) currently and I might make changes along the way.

For the SMS system which will be in the robot for the visitor to leave a feedback directly to the student, I’ve purchased a Sim-card along with a SIM900A module which enable Arduino to send SMS through the SIM card.
After sometime of trying the SIM900A module out, it does not connect to the service provider and I did the research about it and apparently this module only uses 2G from the simcard, and Singapore had phased out 2G service, so this module was unable to be used in Singapore, therefore I had to purchase another better simcard module which supports 3G/4G(and they are rather expensive but I had to do it…)


 It could change direction then the direction change wire is connected to the ground. Powered by a 12V battery, Arduino Uno and a PAC9685 servo driver.
It could change direction then the direction change wire is connected to the ground. Powered by a 12V battery, Arduino Uno and a PAC9685 servo driver.
Mecanum wheel and the Motors will probably be the most expensive components in my whole robot(other then the laptop which I already have) as I purchased the best valued component, not the cheapest, an industrial grade aluminium CNC Mecanum wheel(10cm diameter and capable of handling 45KG load) to make sure they will last at least a year plus a month of exhibition time. The Motor is a high torque (8kg/cm *this is torque, not the load it could carry*) and can do PWM speed control, Speed Feedback and Breaking system built into it.
So although the price, I had gotten the best possible combination of parts with my given budget.
Have you ever wondered what a freelancer could do for you?
I thought of this as a joke(or potentially useful for my FYP), but what if I could have someone to draw my initial concept for me to have a starting point to develop my robot?
Since asking people to do it for free is not something which I prefer, I came to fiverr to find character design gigs just for fun, after asking multiple seller about what they could do, I found one potential one.
 Of course I had no expectation to have something that I could use as a final, but it would be really cool if I can see a work created specially for my project… and I gave a super vague brief to the artist on purpose because I just wanted to see what kind of weird ideas I could get, and if there are any ideas good enough, I will just adopt into my robot!
Of course I had no expectation to have something that I could use as a final, but it would be really cool if I can see a work created specially for my project… and I gave a super vague brief to the artist on purpose because I just wanted to see what kind of weird ideas I could get, and if there are any ideas good enough, I will just adopt into my robot!So after half day or so, the seller delivered the drawing I requested.
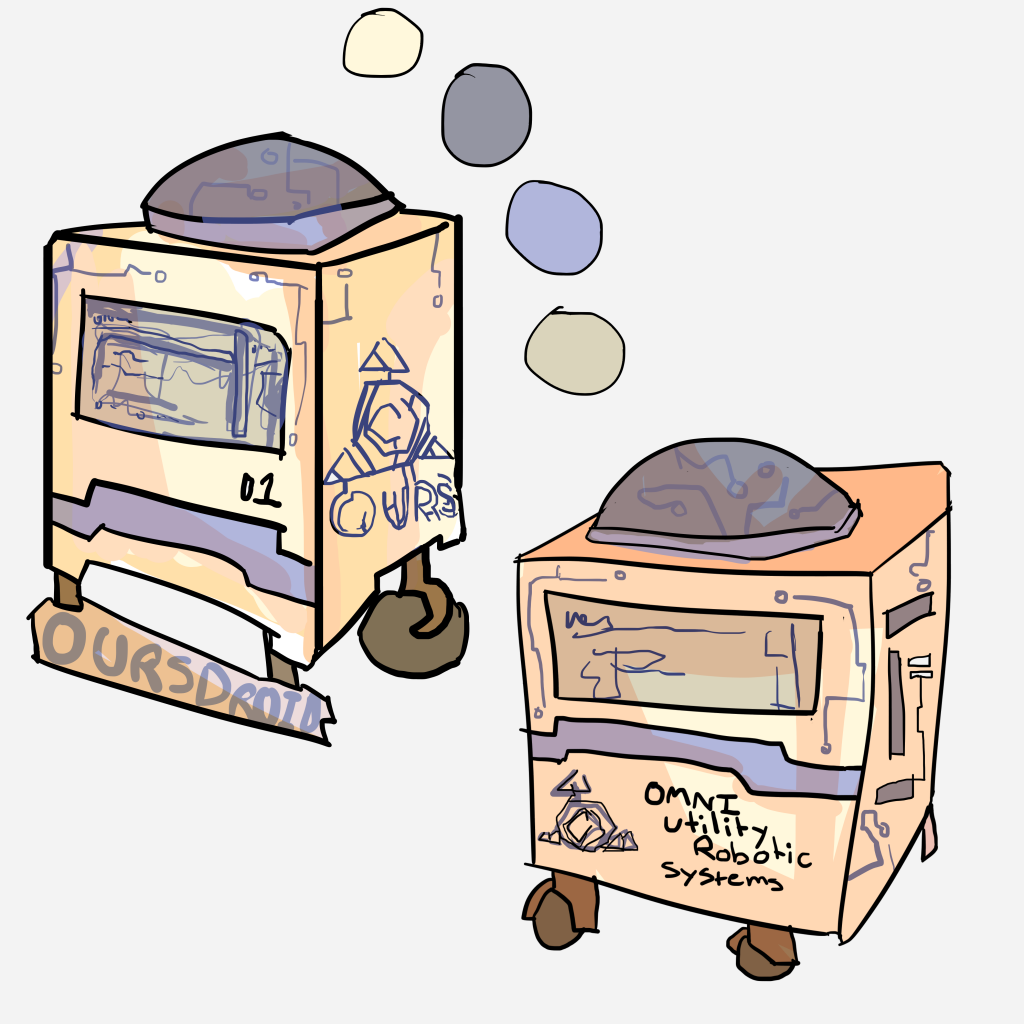

It is really cute and definitely not something I would use, It look like a cardboard robot and is not what I would like to build, but well, it is really funny and refreshing to see my potential “robot” to go for picnic alone!
I shall just start thinking about the design on my own(afterall I had done too much reference research from existing artwork hence this weird idea of getting others to draw me a tailored robot.) and take advice from my friends around me and not do weird stuffs online.