After many different trials and setback, and after going through many online courses for Visual Studio which I initially wanted to use it to create the interface for the robots, Senior Kapi suggested to me to use Unity instead as it will be easier to do a nicer graphical interface(Visual Studio will just be hard to make beautiful UI from all I went through) and is able to do advance AI like path-finder which I might use it in the actual robot for navigation, Also, Unity is better in Particle system which I will use to create animation for the UI and so, I gave up the idea of using Visual Studio for the back-end programming, and while going through the tutorial of Unity, the scripting side within Unity was still in Visual Studio, so my effort in learning Visual Studio wasn’t wasted because it incorporated well into the Unity system.
To start off prototyping, my target: To create a page that is able to change the image and text by clicking any of the buttons placed within a scroll-able panel.
This will be required as the final product would enable the user to browse the student’s information and work, there should be a easy to use User Interface that allows them to do so.
The course which I went through:
https://www.udemy.com/c-sharp-visual-studio-app-development-tutorial/
The course which I am currently going through:
https://www.udemy.com/unity-master-video-game-development-the-complete-course
https://www.udemy.com/robotics-for-beginners-build-time-control-robot-from-scratch
Additional Tutorial.
https://unity3d.com/learn/tutorials/modules/beginner/ui/ui-scroll-rect
https://unity3d.com/learn/tutorials/topics/user-interface-ui/ui-scrollbar
https://unity3d.com/learn/tutorials/topics/user-interface-ui/ui-mask
Current Progress:
 this is a gif, click to play
this is a gif, click to play
After thinking about the problem of the robot’s sensing(i must try not to have the robot to knock people down.) I was considering about Lidar for a long time but the price and the spinning part was the main concern that put me off, it cost around $150 for just one sensor which I am not confident if it will even work in my project, also because it is the Lidar which spins, it meant that it have to be placed on top of the robot and I am sure that it will break somehow due to visitor’s curiosity. After whole lot of research (I will still use ultrasonic/infared sensor like we did in class, but these are not reliable and cannot be the primary sensor) I came across something that seemed really promising… let me introduce to you, the old KINECT.
Why? Why Kinect? because..
1- it does not have moving part yet it is able to detect a wide area with roughly accurate distance.
2- it is easy to be concealed in the design of the robot as it could be place within the shell.
3- it is not expensive and I already have one unused Kinect at home, futhermore if I need more, the school have them.
4- USB operated means I do not need to find additional adapter/converter to use them.
Sounds good, the problem is, I don’t know how to use them and the documentation i found are not for what i need so i need to do further research.
………………………………………….
The following day, I went to school to loan the kinect from school and after some research which says it will not work on windows 10… I finally found some that mentioned that it is possible.
So TADAAAAA!
now I need to find a way to plug the data into Unity for then it will be possible to use it as a distance sensor..
(On the side note, I found that Kinect V2 is much better as it has wider field of view so I might consider that too.)
Children toy-Wheel System
 Remote Controlled Children vehicle, it can take up to 30KG hence I bought this to use it as a base since it will be able to carry all the components.
Remote Controlled Children vehicle, it can take up to 30KG hence I bought this to use it as a base since it will be able to carry all the components.
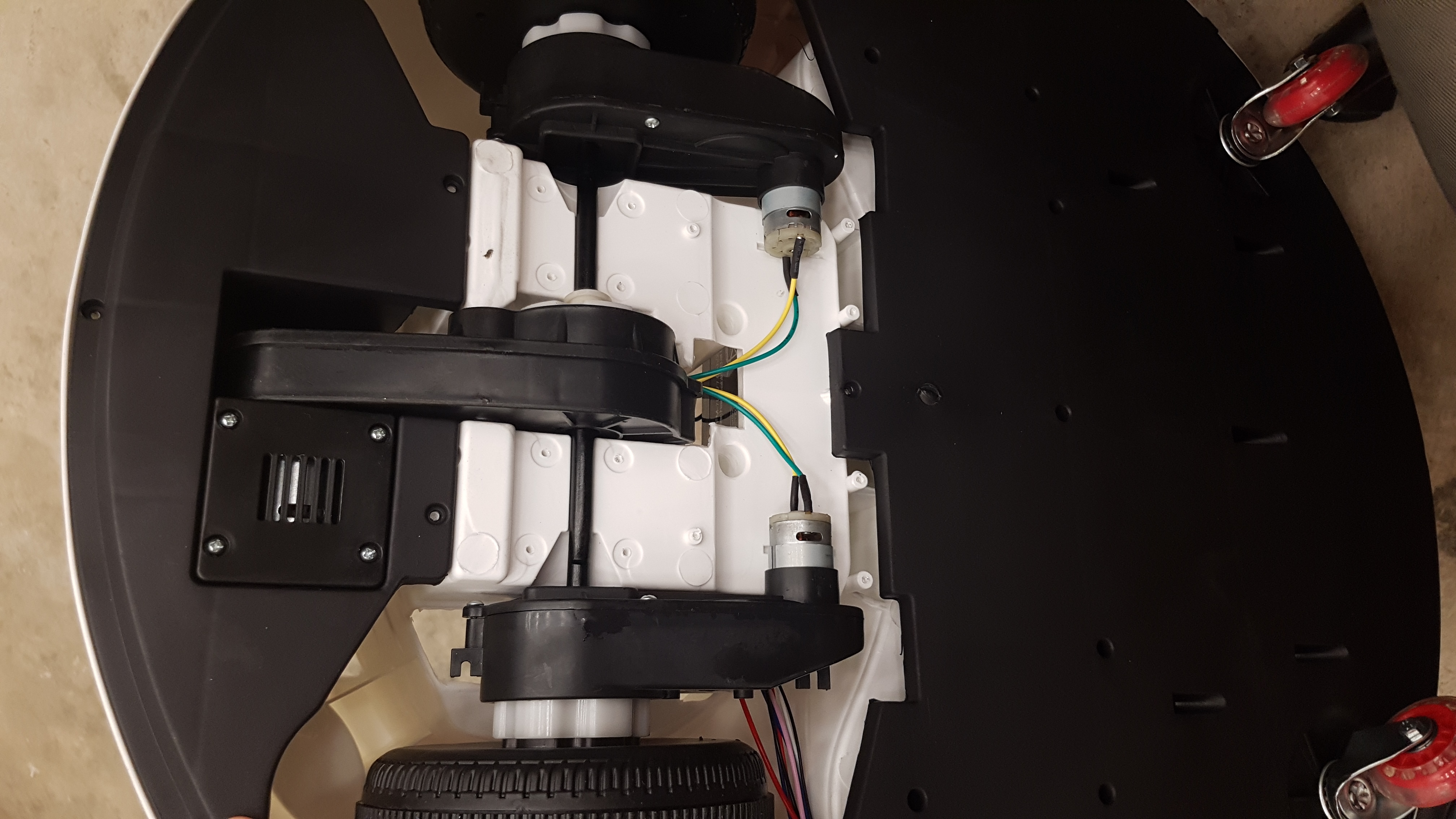
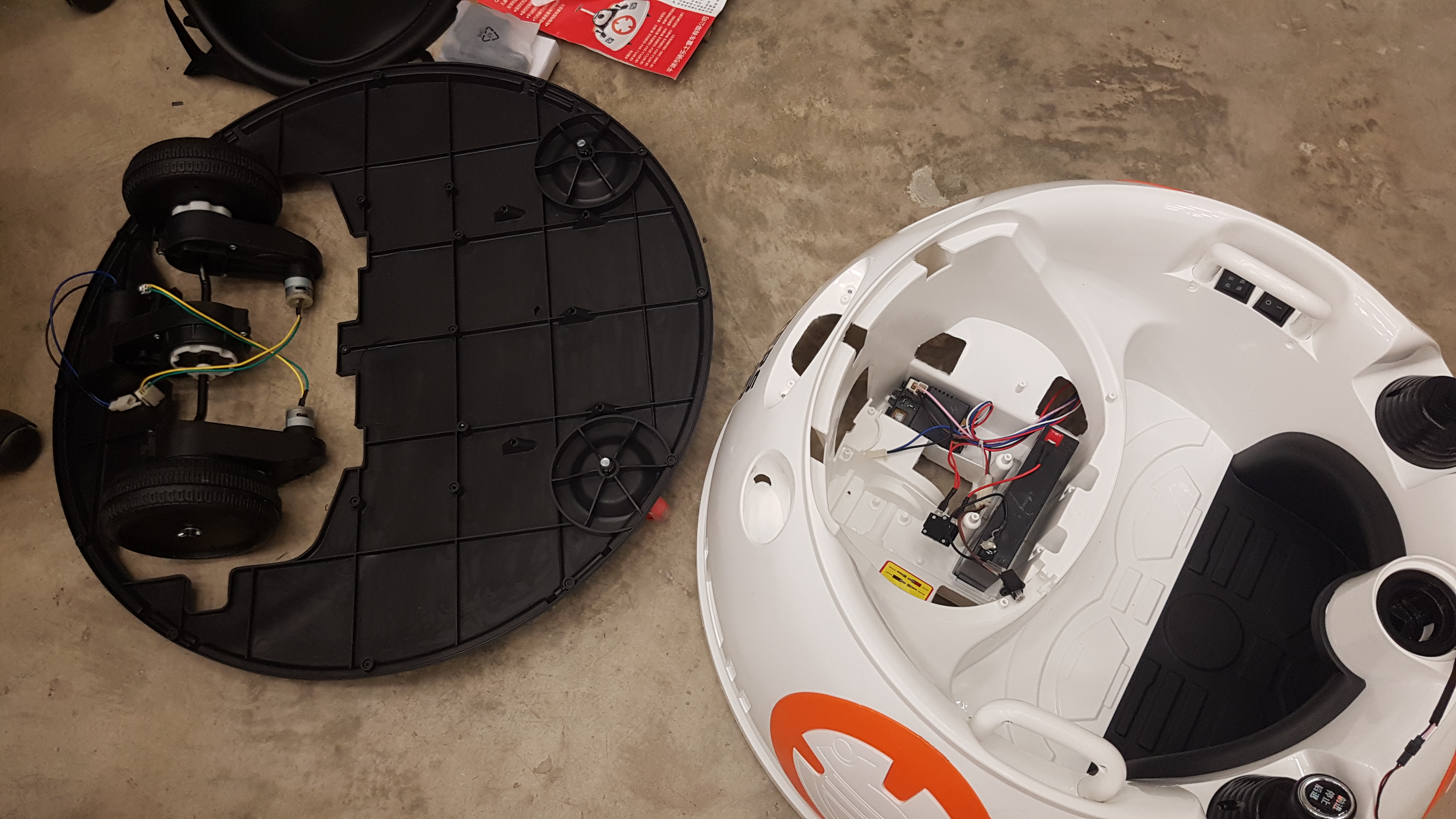
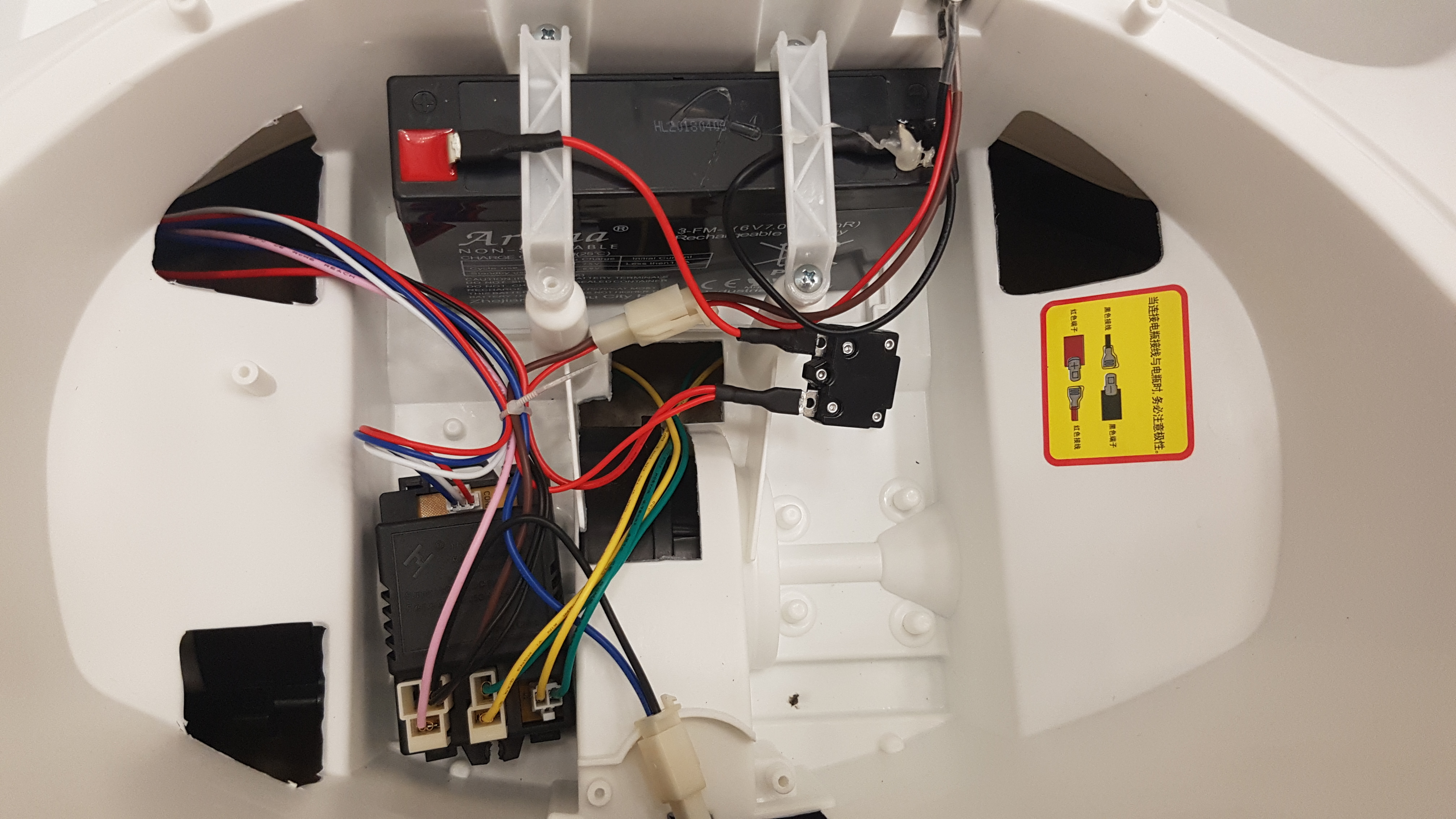
Just for the record, this thing cost $103.51 with $2.99 for shipping fee from china (used EZ-Prime hence the cheap shipping), i think that the overall value is so much higher than the cost, I will take it apart and use the components within it and discard the BB-8 theme plastic case.