Previous pitch: https://oss.adm.ntu.edu.sg/ho0011an/final-project-pitch-build-me-up/
Short recap Basically, I was too fixated on the idea of using weighing scale as the input just because I wanted that specific aspect to tie the project to the theme ‘Distant Body‘. But, overall, the initial pitch didn’t really make sense and I was left off with the question- what more can you do with ‘reflection’? & advised to do experiments first.
So- that’s what I did.
Using TouchDesigner, I tried to move a red line to where there is motion.
Trying to replicate Daniel Rozin’s trash mirror but on a digital screen. This led to a couple of random ideas.
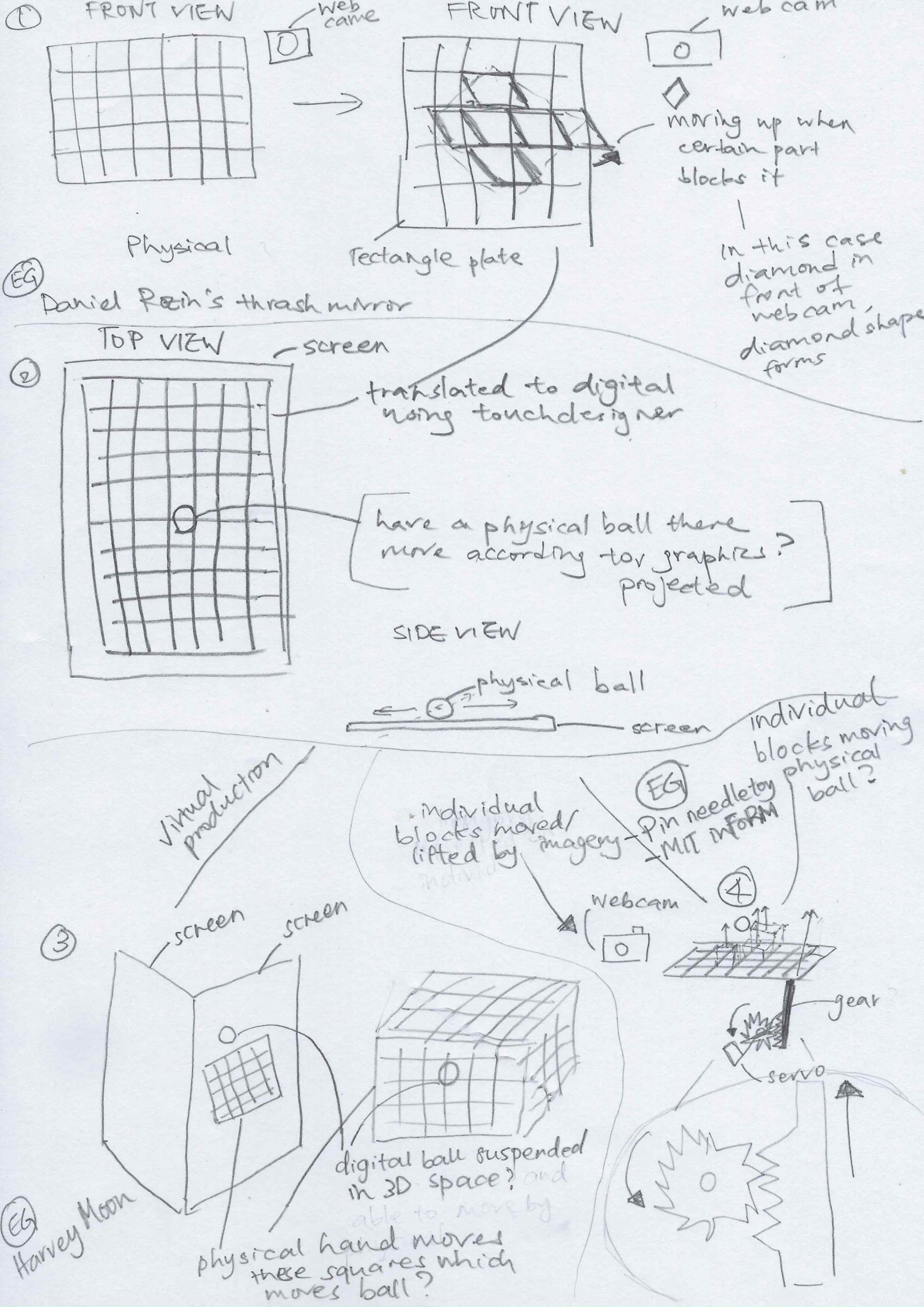
Brief explanations on some ideas
Idea 2 Thinking along the lines of trying to create a tangible user interface perhaps where the physical ball is able to move according to the projected graphics or vice versa where the projected graphics changes according to the placement of the ball.
Idea 3 Maybe a screen based device and user can manipulate the graphics in ‘3D’ space?
Could be in a form of 2 screens or maybe 1 screen but with acrylic to give a hologram look
What Harvey Moon said: “you don't need disguise or unreal or stype to do the virtual production stuff. you can do it…
Posted by TouchDesigner on Saturday, 26 September 2020
Idea 4 Individual modules will move up to replicate the shapes of what is detect on the webcam. EG pin needle toy

With all these ideas, I was further challenged to do something with the ball. To perhaps make it into a game.
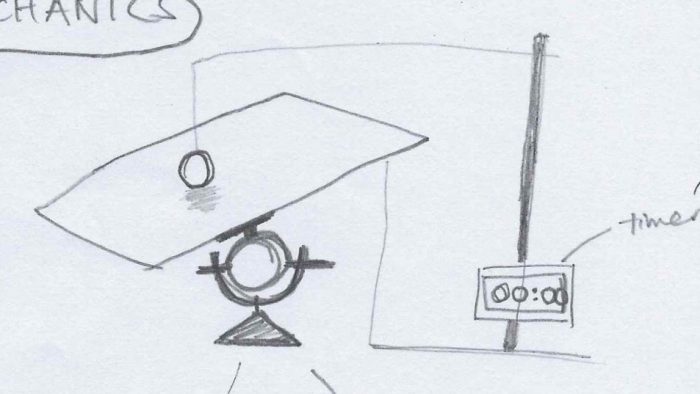
So after deliberating more, my final sketch idea is an expansion of Idea 4. 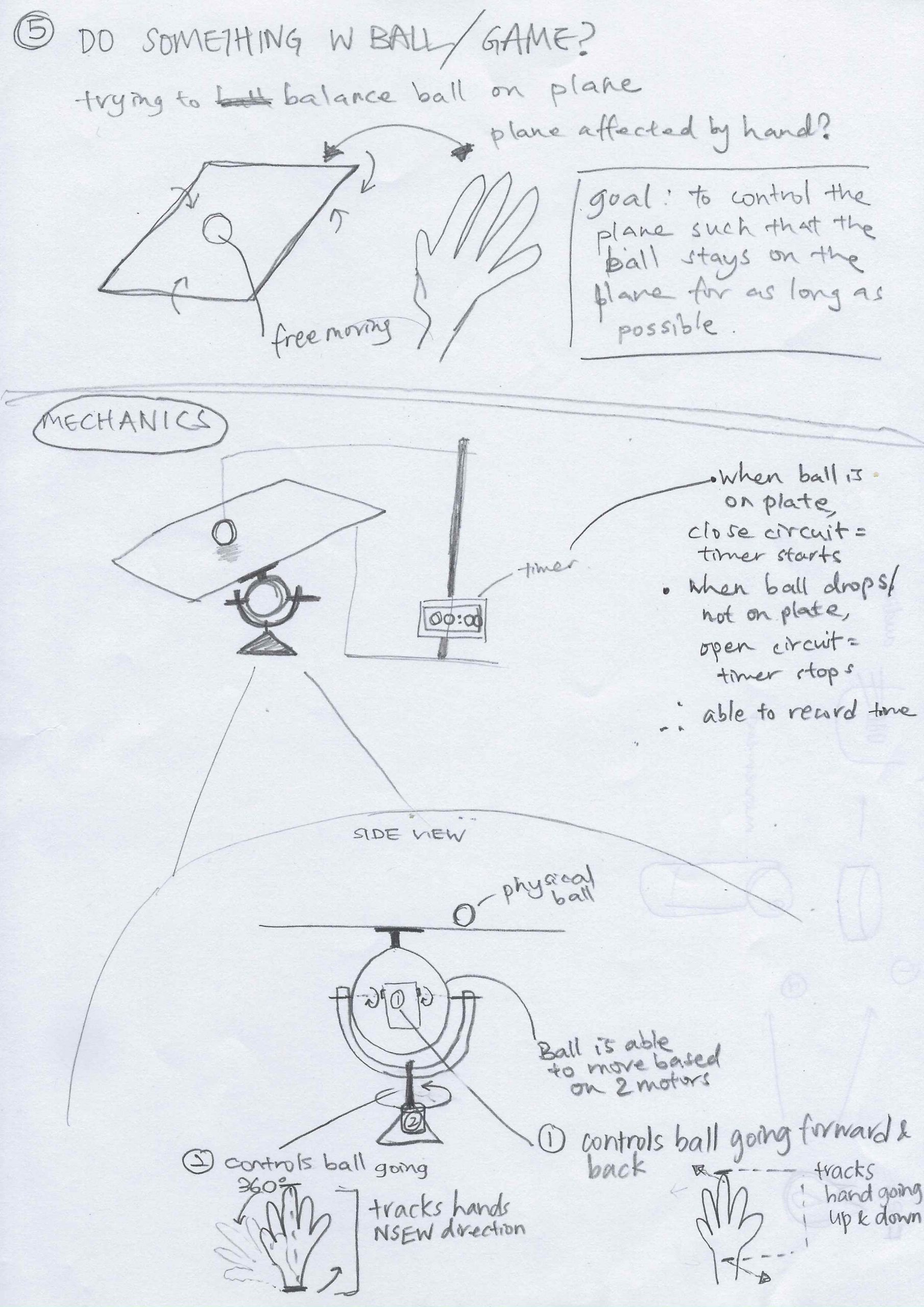
It going to be a game and the only goal is: control the plane, remotely with your palm, such that the ball stays on the plane for as long as possible. Time starts when the hand is detected and stops once the ball drops off the plane. Longest time = Highest on the score board.
Flow: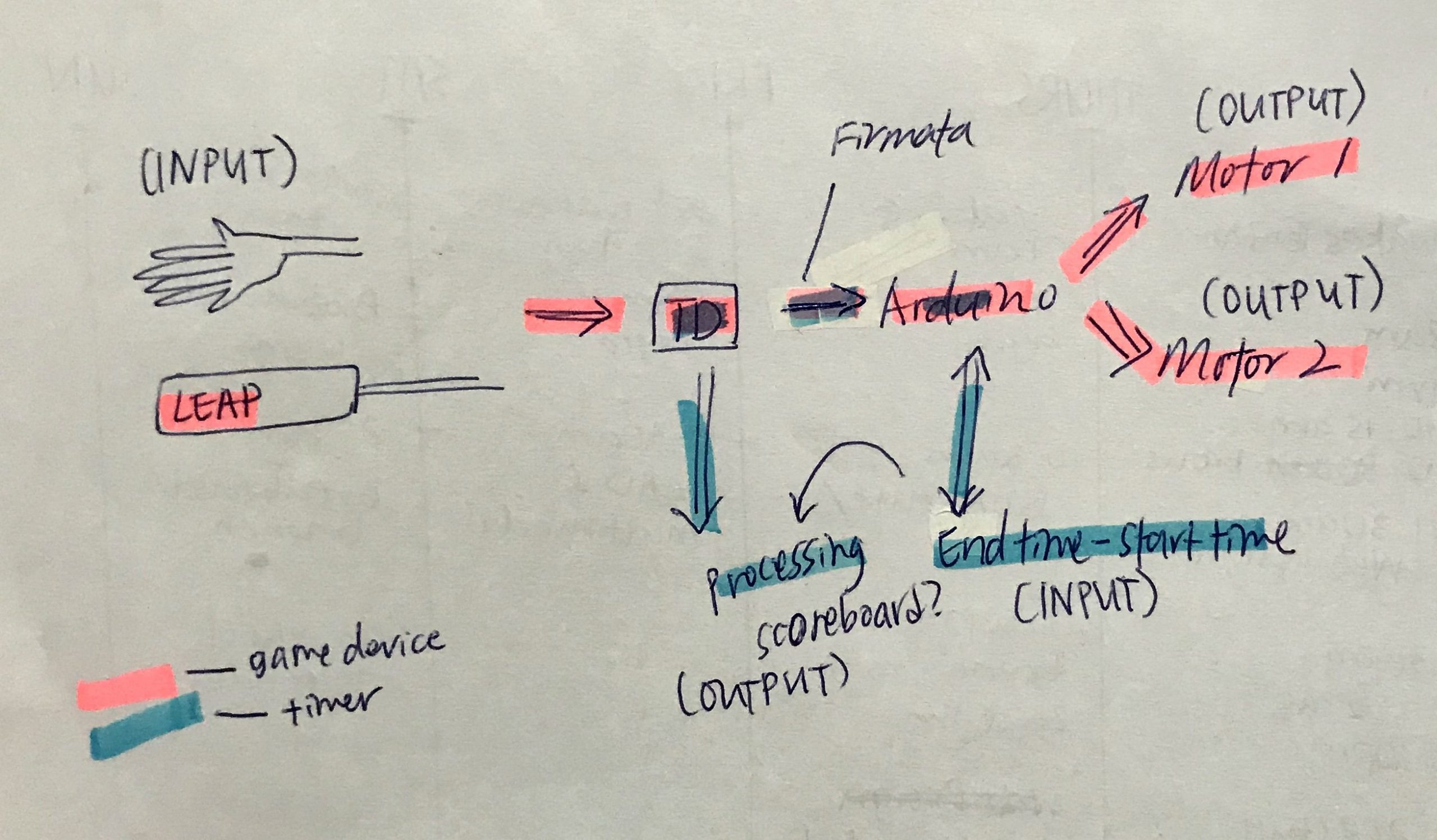
Software:
TouchDesigner
Arduino IDE
Hardware:
Leapmotion
L298n driver + Dual/Double Shaft DC Motor + Single Shaft DC Motor
Arduino UNO
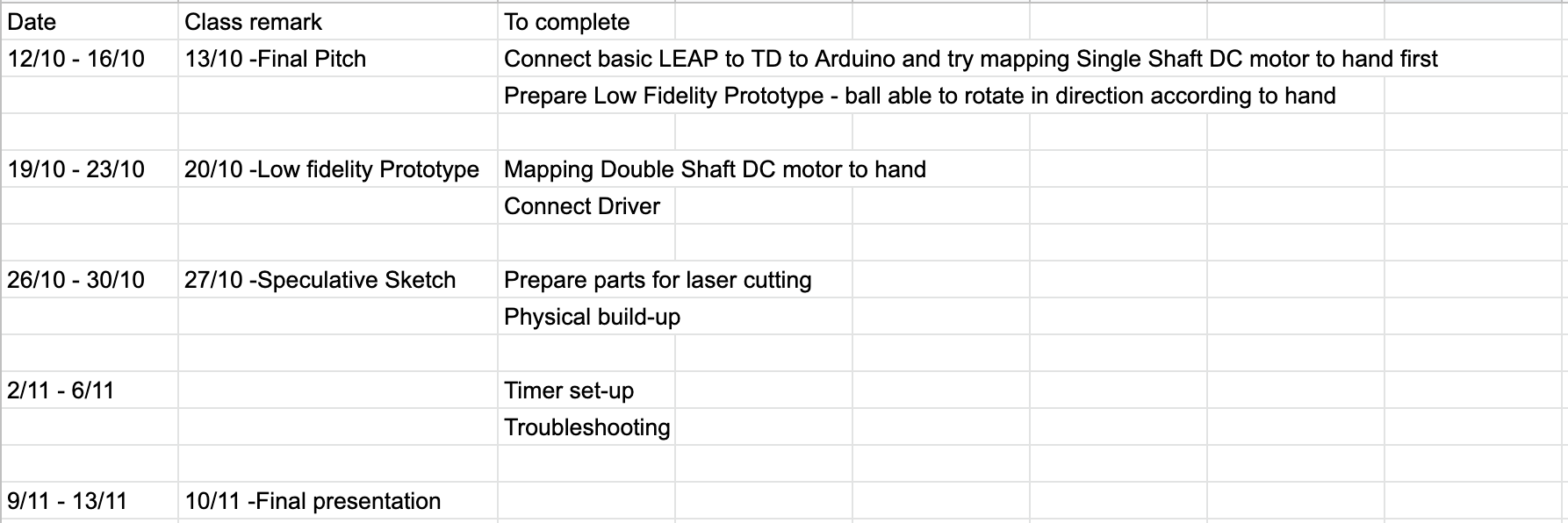
Week breakdown of tasks:
You must be logged in to post a comment.