Recent Posts
FYP pt. x - Dynamics
This week, I’m getting all the things that need dynamic simulation out.
I spent the better part of a day just figuring out the simulation for a hospital blanket that i’m happy with. This is the end result
It helped having first hand experience of the weight and texture of the blankets, so knowing precisely what I was aiming for helped. That Read more →
FYP pt. x - Lighting and Scene Progression
Getting the scene layout is one thing, but lighting the scene is another; and on top of that working the camera for the scene, its focal length and movement all are another aspect. Here’s an example of how Scene 4 has progressed over time.
My initial idea was that the light would be from the back of the room, shining into the Read more →
FYP pt. x - Scrapping ideas
Sometimes concepts don’t work out. One of which was to have various objects suspended from the ceiling of the room, swaying gently, very minimal movement. Had a lot of trouble getting that right, either the simulation would stop abruptly, the movement would be way to over-pronounced. Additionally the dynamics simulator would over time slowly drift from each other (the string Read more →
FYP Process 9: The Real Built, long process for making the head.

After a long time of not updating, I’ve started to built the actual head for the robot using EVA foam, which was my first time using it. The reason I am using EVA foam is that it is lightweight yet firm, easy to cut and form into shapes, and the joining of parts only requires contact glue (other glue will Read more →
FYP Process 8: Explorer 27 Growing Up.

Few weeks ago, Explorer-27 was a short, dog-sized robot:
{kind=link}
and after weeks of further development..
fast prototype using sticky plasty to form a tablet holder.
{kind=link}
{kind=link}
{kind=link}
Afterwhich, I also built the new paper model dog head(Husky)
{kind=link}
And installed the LED eyes into Read more →
FYP pt. 4 - RED/BLUE Colour Tests

Finally on to the gimmick of this project!
To start, I set out into Illustrator to test out the limits of red and blue’s hue, saturation and brightness.
(Feel free to patronize this Carousell dealer for R/B Glasses https://sg.carousell.com/p/nvidia-3d-glasses-191668084/)
After that I started to apply the same principles to the files i already had rendered, first with stills and then with video.
Something Read more →
FYP pt. 3 [HDRIs and Wet Floors and Depth of Field, Oh My!]

HDRI’s
I’m exploring HDRI’s as a way of lighting my scenes. HDRI’s are 360 panoramic photos with multiple baked into one image with a large dynamic range; hence the term HDRI: ‘High-dynamic-range imaging’. These files are used as a means of lighting and are often used in 3D integration for live footage. The 3D software uses the image to calculate lighting Read more →
FYP pt. 2 [Motion blur, Materials, Lighting, Textures]

The weeks following the previous post was further experimentation and learning the technical aspects of what i want to achieve. I’ll be breaking these down into a few posts. In this one I’ll be covering the earliest weeks.
MOTION BLUR
One of the problems I found was that my camera pans in C4D came out looking very flat, like a Ken Burns Read more →
FYP Process 7: Development and Upgrades.

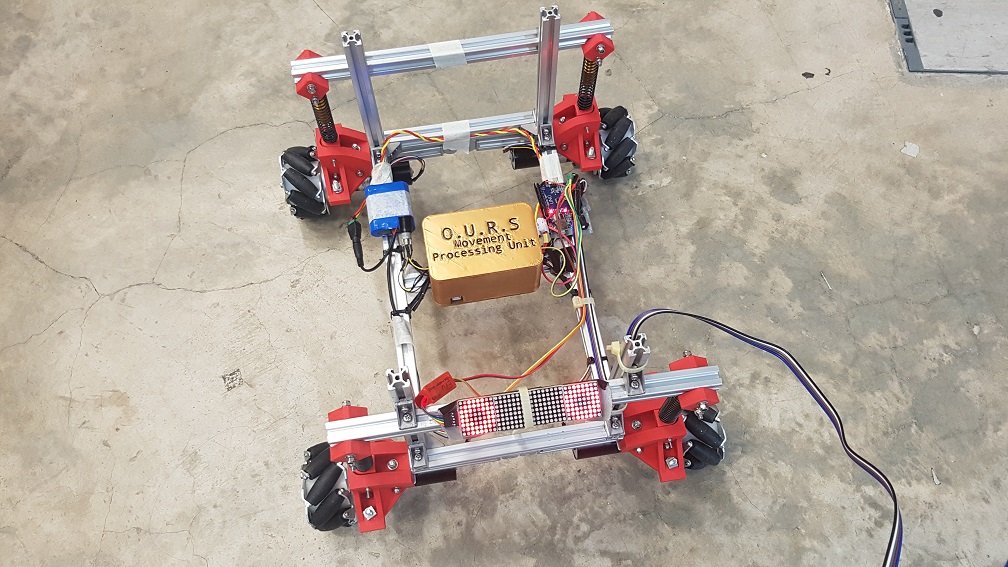
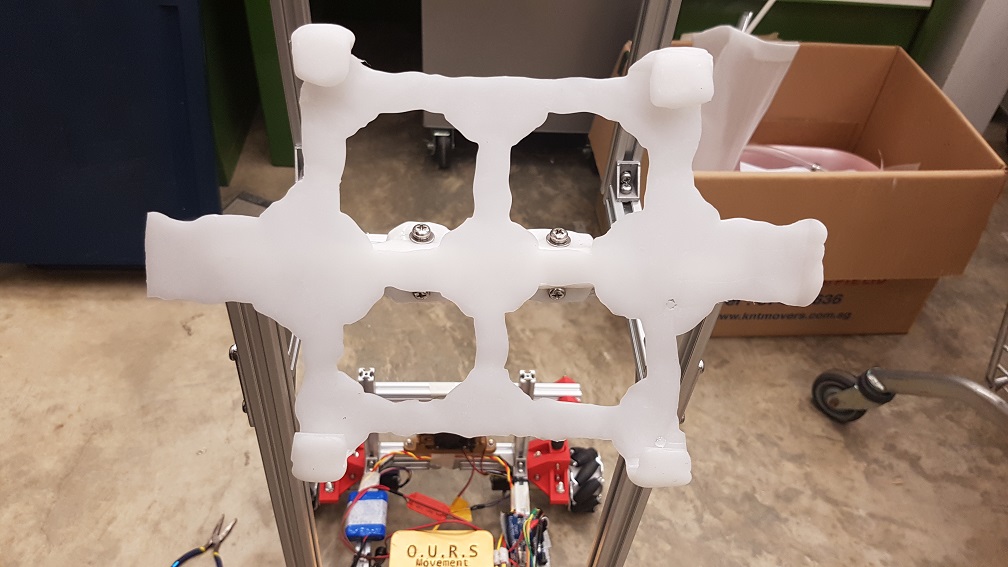
Processor protecting case:
Parts Strengthening to make sure nothing come loose:
Experimental Head for the robot:
Plastic model building from the Japan Research Trip:
this is the link of the japan research trip.
Lattepanda with Unity and Arduino:
To experiment with speed and delay of Lattepanda with unity to control arduino, which is not bad!
{kind=link}
FYP Process 6: Robot Appearance Researches

show researched :
These are the show I watched in the past 2 weeks to get ideas for the robot personality, appearance concepts, and the overall world for O.U.R.S..
next gen:This is the nearest concept to what I have in mind, from the robot characteristic, appearance, to the overall concept. the Lab scene, the destroyed appearance is what i could reference on Read more →