
*Group OSS by JJ and Fran
Refinements
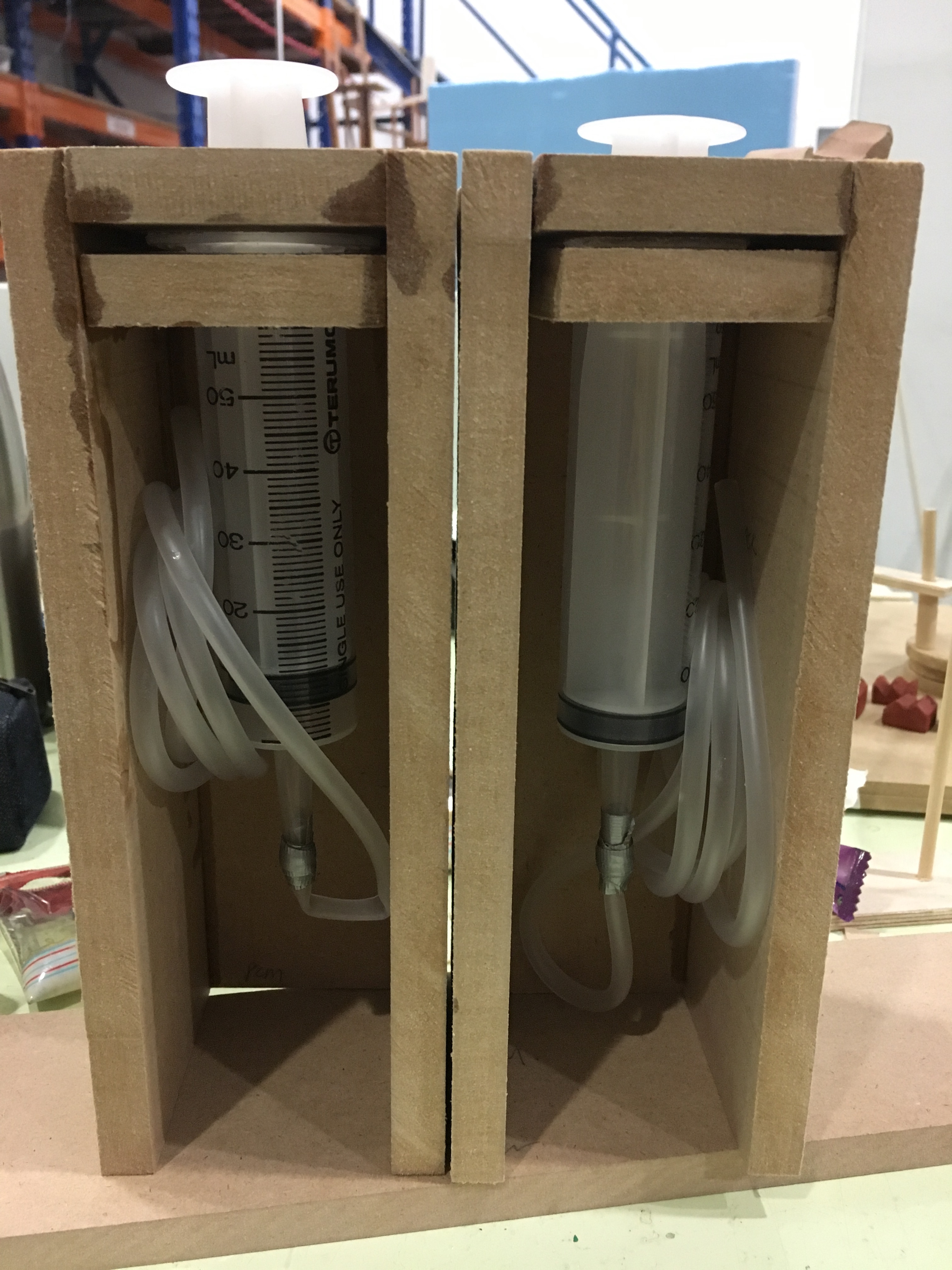
We redesigned the frame such that the syringes would be at the side and the ‘fleas’ would sit in the middle of the model. This way, it’s easier to operate the mechanism with swiping motions of the arms.

Making of Final Model
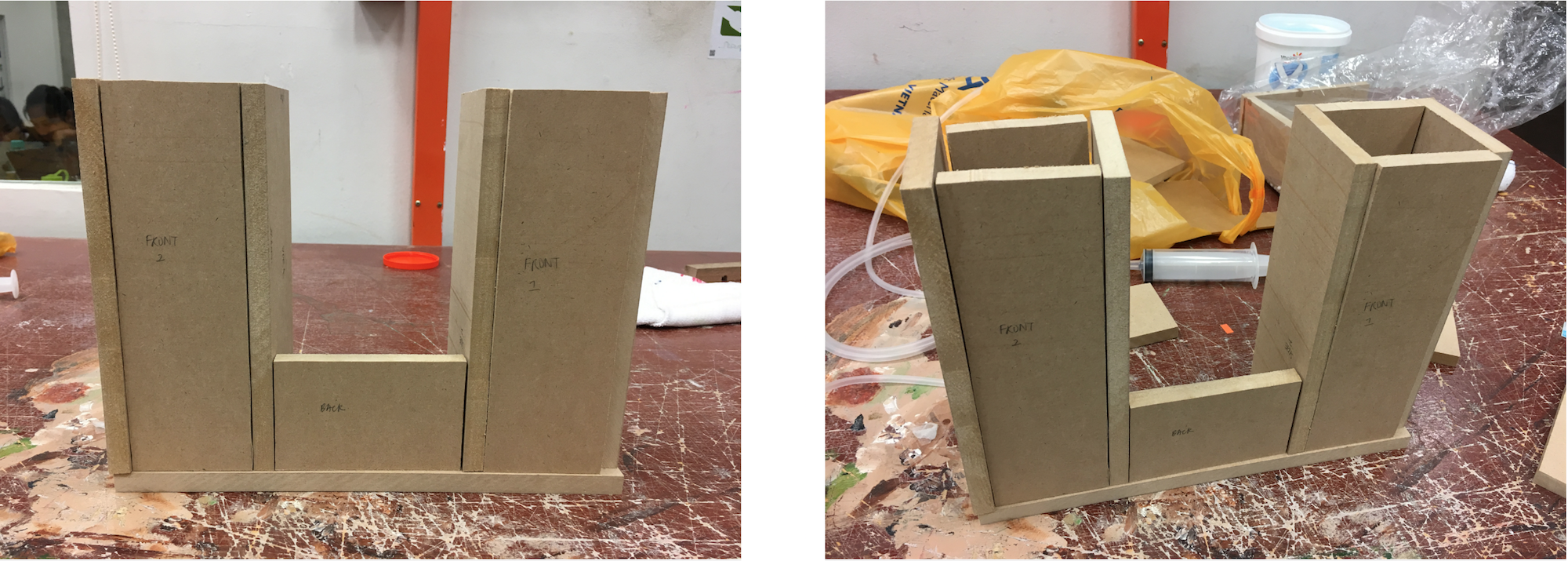



At this stage, we were still trying to figure out how we can incorporate the swiping movement of the dog into our model. Here, we tied a long piece of thin wood in hopes that the see-saw motion would resemble the swiping movement. However we felt that this motion was too forced and decided to scrape it.
Demo without the wooden stick:
The cover at the top is removable if one opts for a first-hand experience of ‘fleas’ flying in their faces.
Final Model


Overview:
Top view:
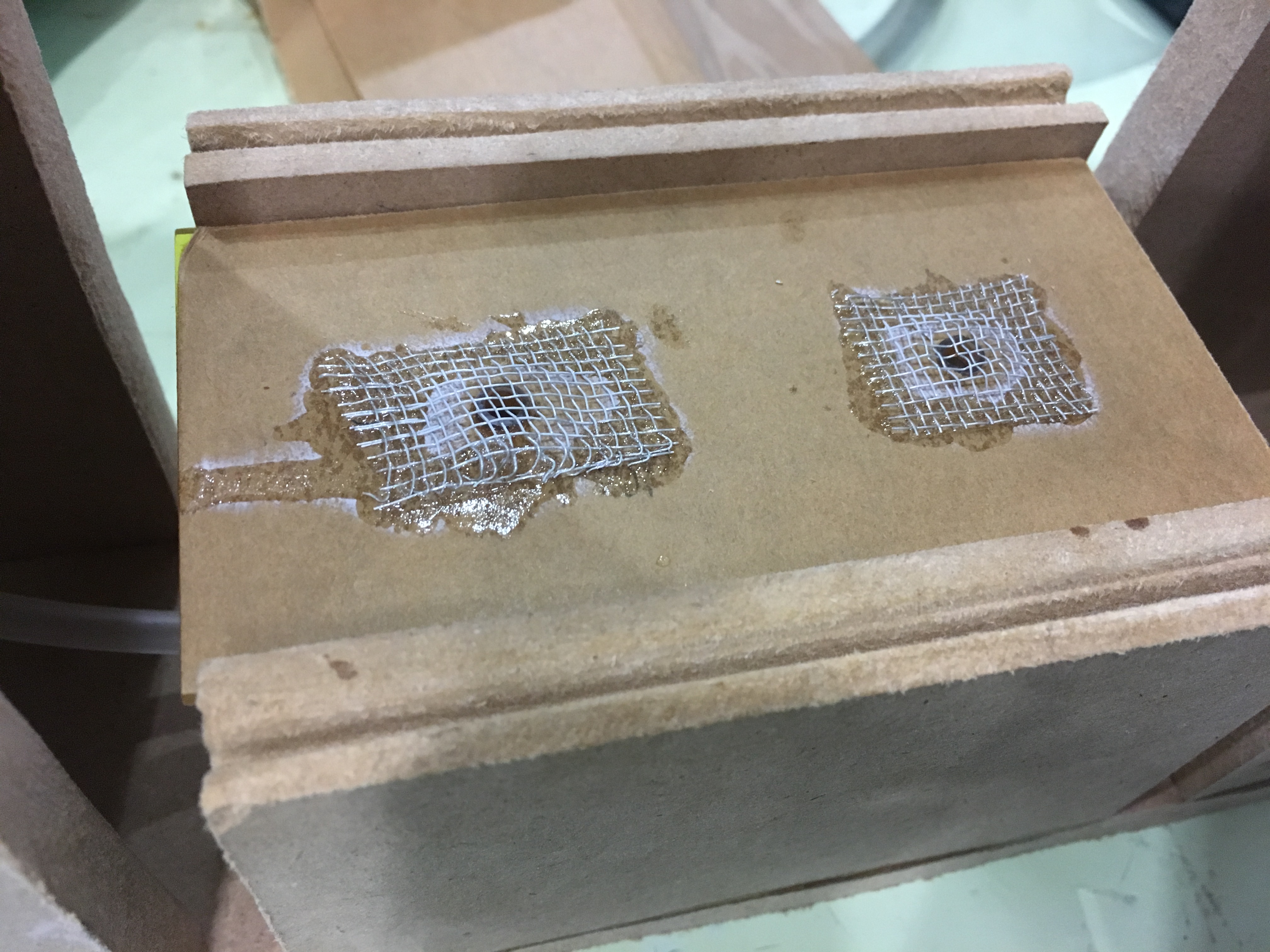
Close-up: