Software
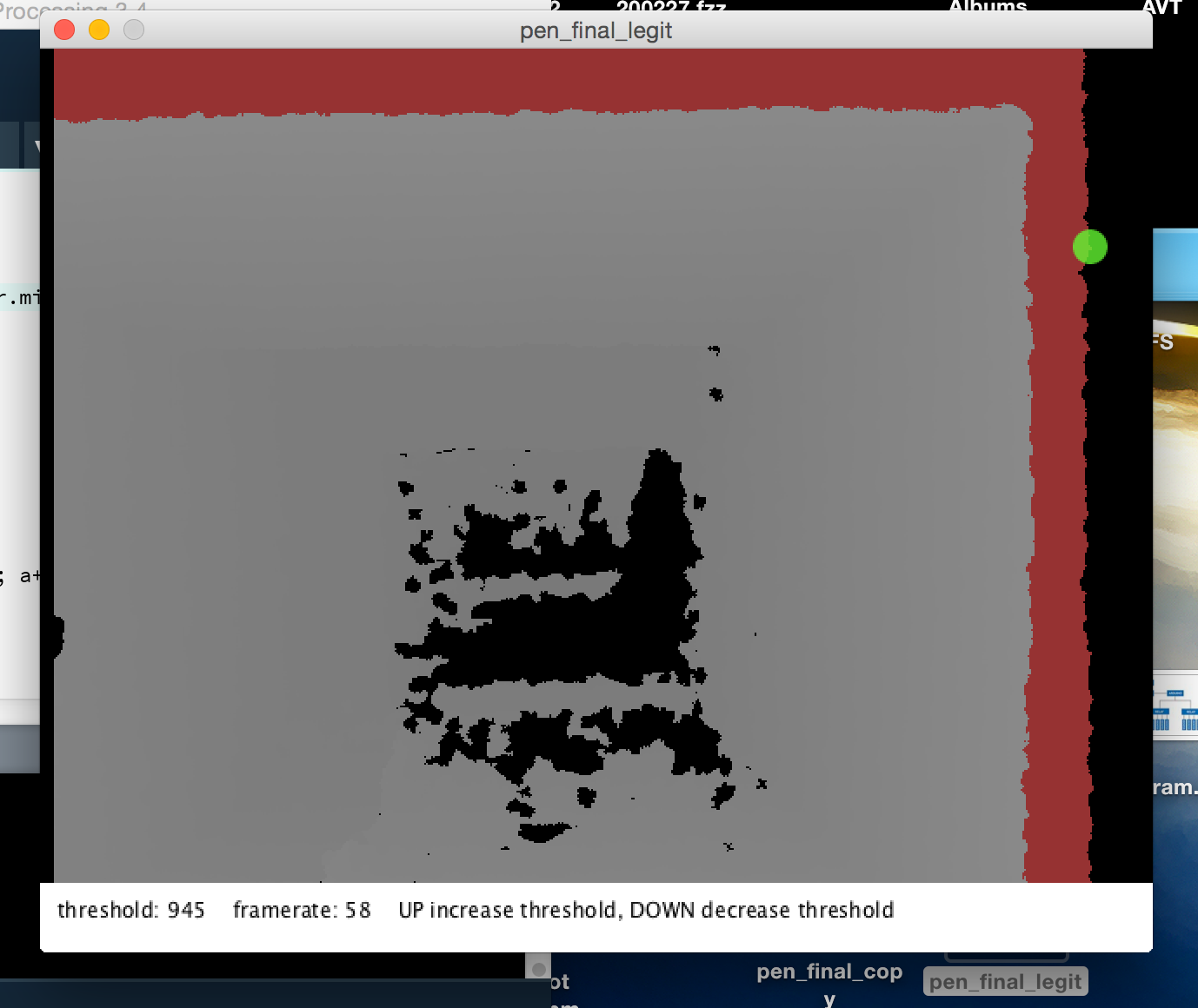
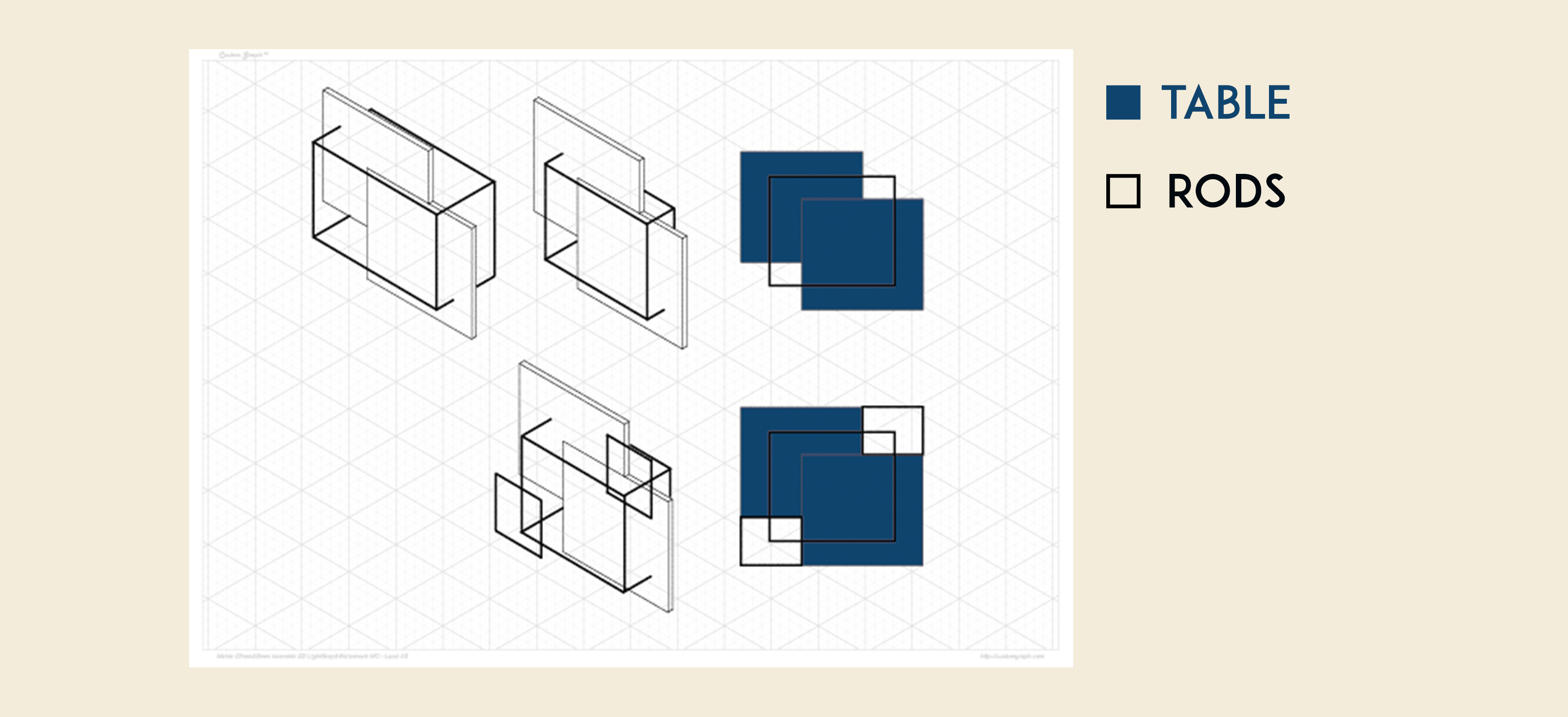
The green pointer indicates the area that is closest and draws the raw depth data from the kinect. We created 3 distance ranges using that information.
The camera however, has a AoE and is unable to detect objects that are <= 51cm.
Software
The green pointer indicates the area that is closest and draws the raw depth data from the kinect. We created 3 distance ranges using that information.
The camera however, has a AoE and is unable to detect objects that are <= 51cm.
Hardware

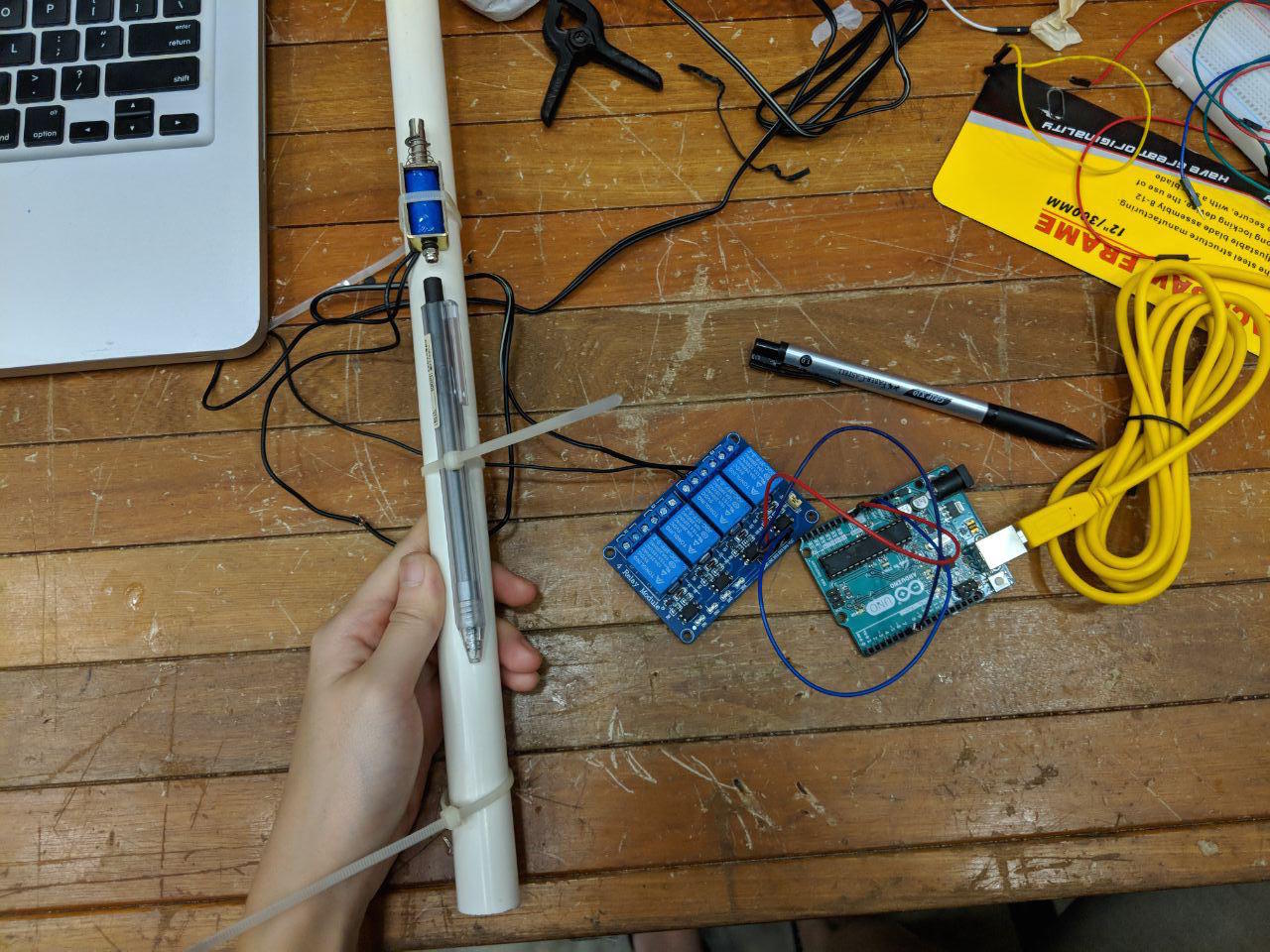
We tried connecting all 8 solenoids to the arduino board through 2 relays.
Each relay is to be powered by 1 adapter. Using 1 adapter for 2 relays will cause the relays to be switch on and off in turns instead of simultaneously.

Software
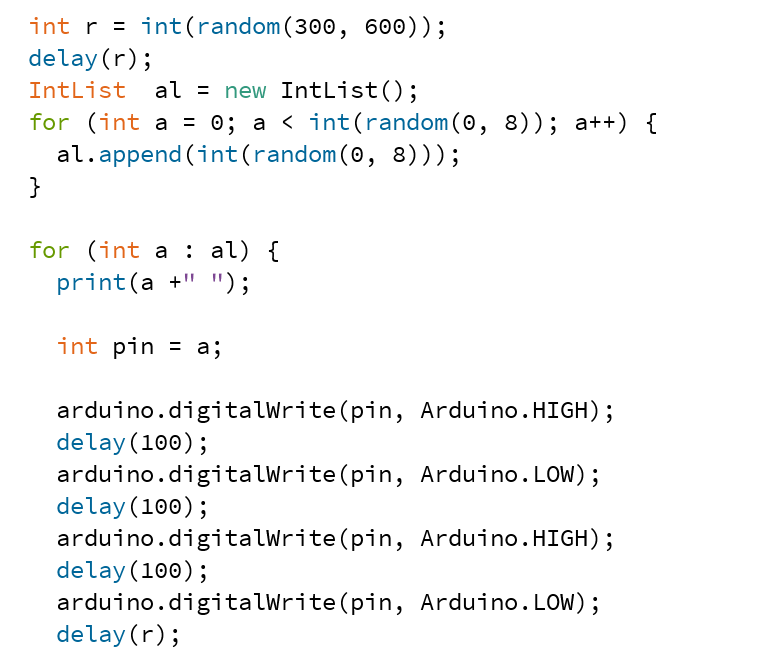
The current code uses a random delay inside each loop zone. The program reads the code line by line, and stops the entire reading process when there is a delay. Every loop has to be completed before the program is able to read the distance information from the kinect to determine which zone to activate. The lag is induced as there is no way to constantly read the distance data and jump out without completing a full cycle of the zone loop.
Hardware
Software
Loaned out the kinect to test the depth sensor.
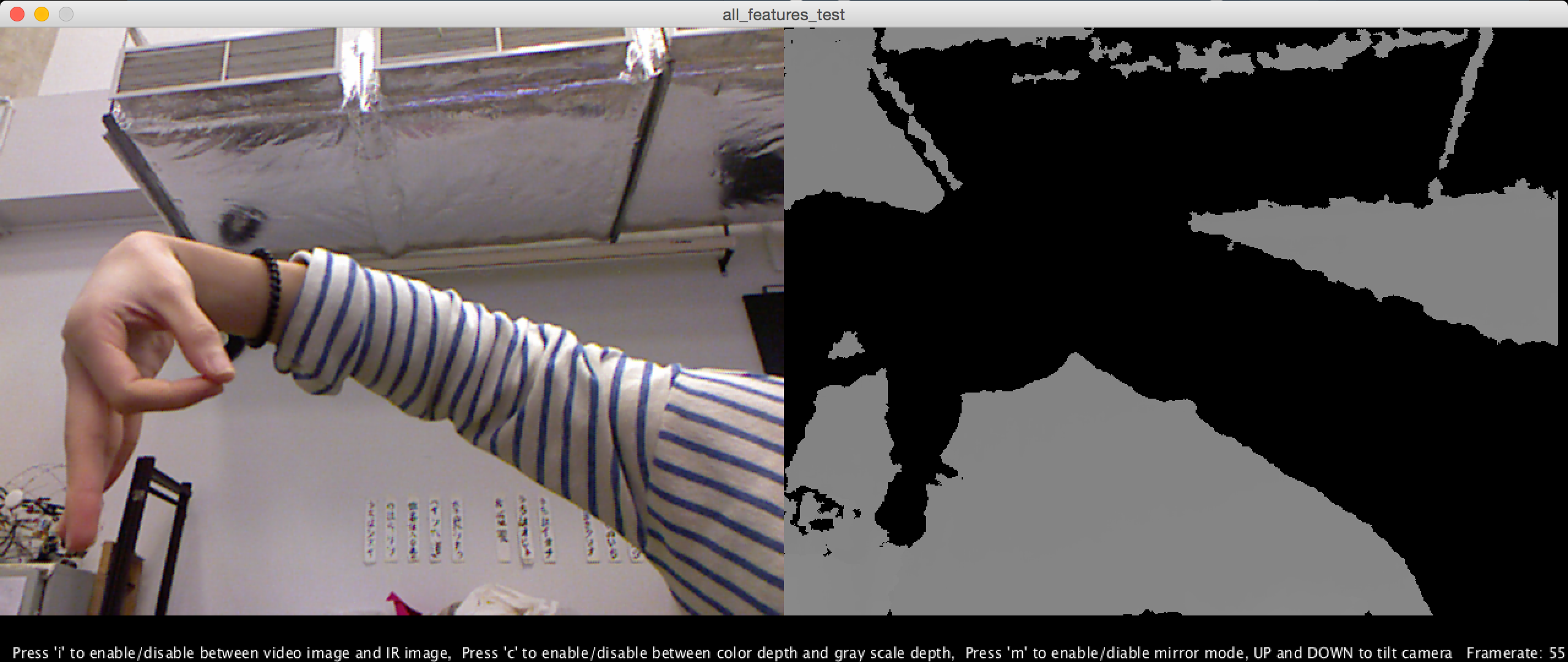
Kinect outputs a double image as seen on the right. This is because there is a physical offset between the IR camera and the projector.
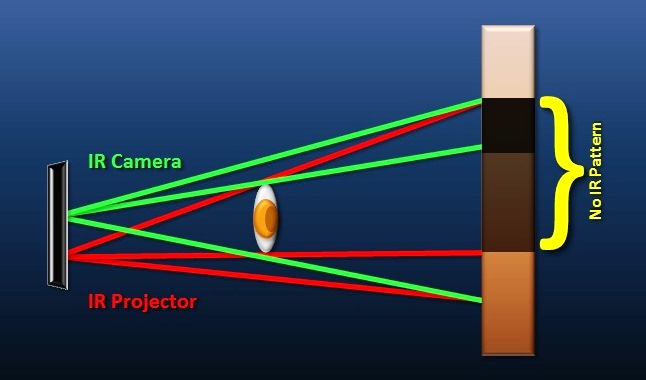
Thankfully, this isn’t an issue as all we need is the depth data and not precise location information.
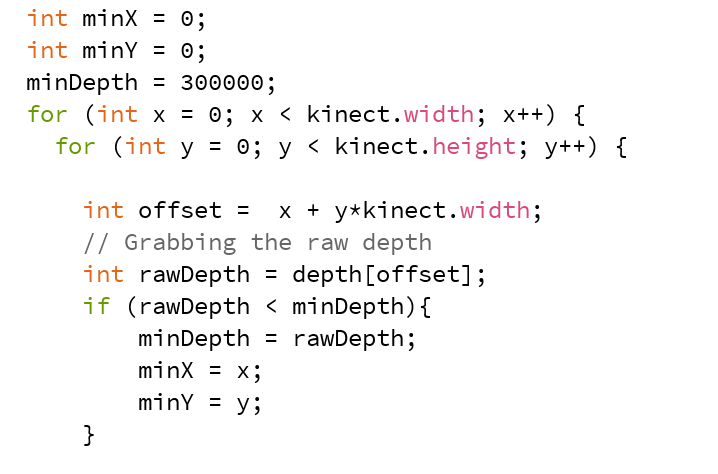
Next, we tried to colour code objects based on how far they are from the kinect.
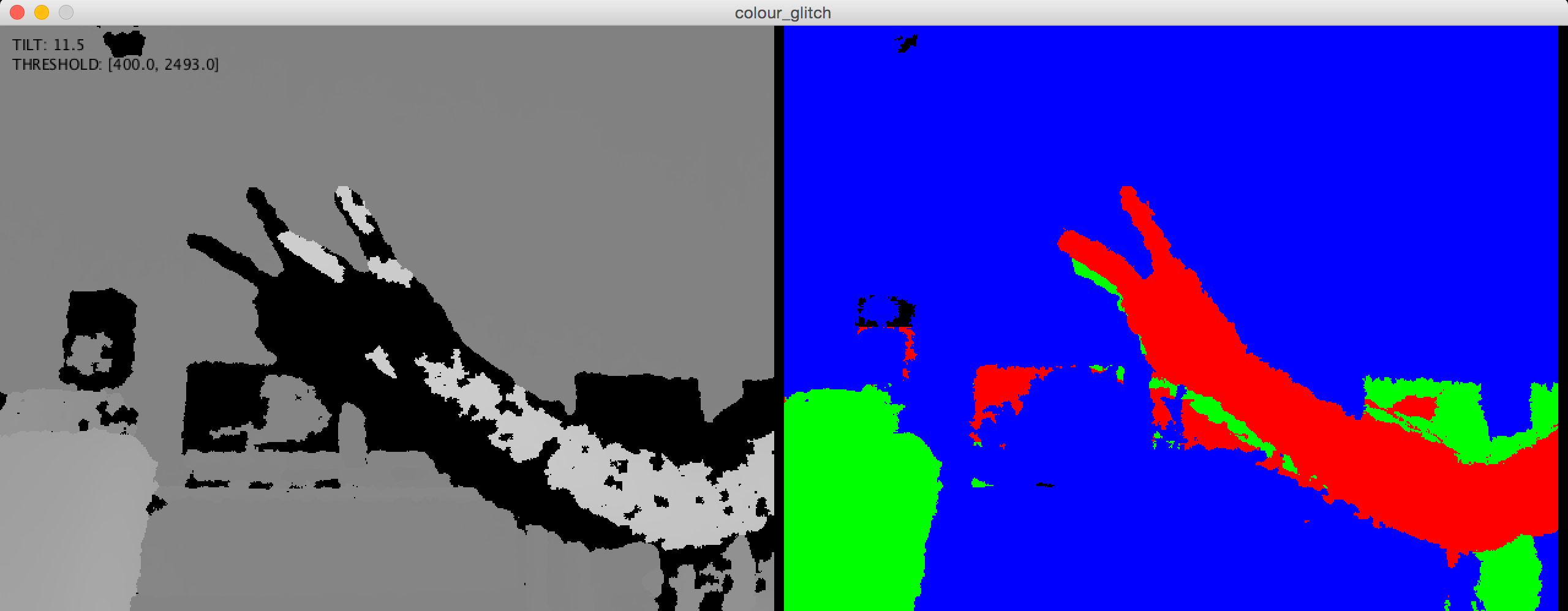
The sample code we found online did not include the function to purely draw the raw depth distance data.
Look for corey for some help and…