Hello, we are back with some progress for our prototype.
Originally we wanted to use Arduino to control the motors, and connect them to MAX MSP but in the end we were introduced to Phidgets by Prof LP, and it is a life saver!
At first, we planned to control stepper motors using Arduino, and faced difficulty in controlling the reset, however once we switched over to using servo motors with Phidgets, we could achieve what we wanted more easily.
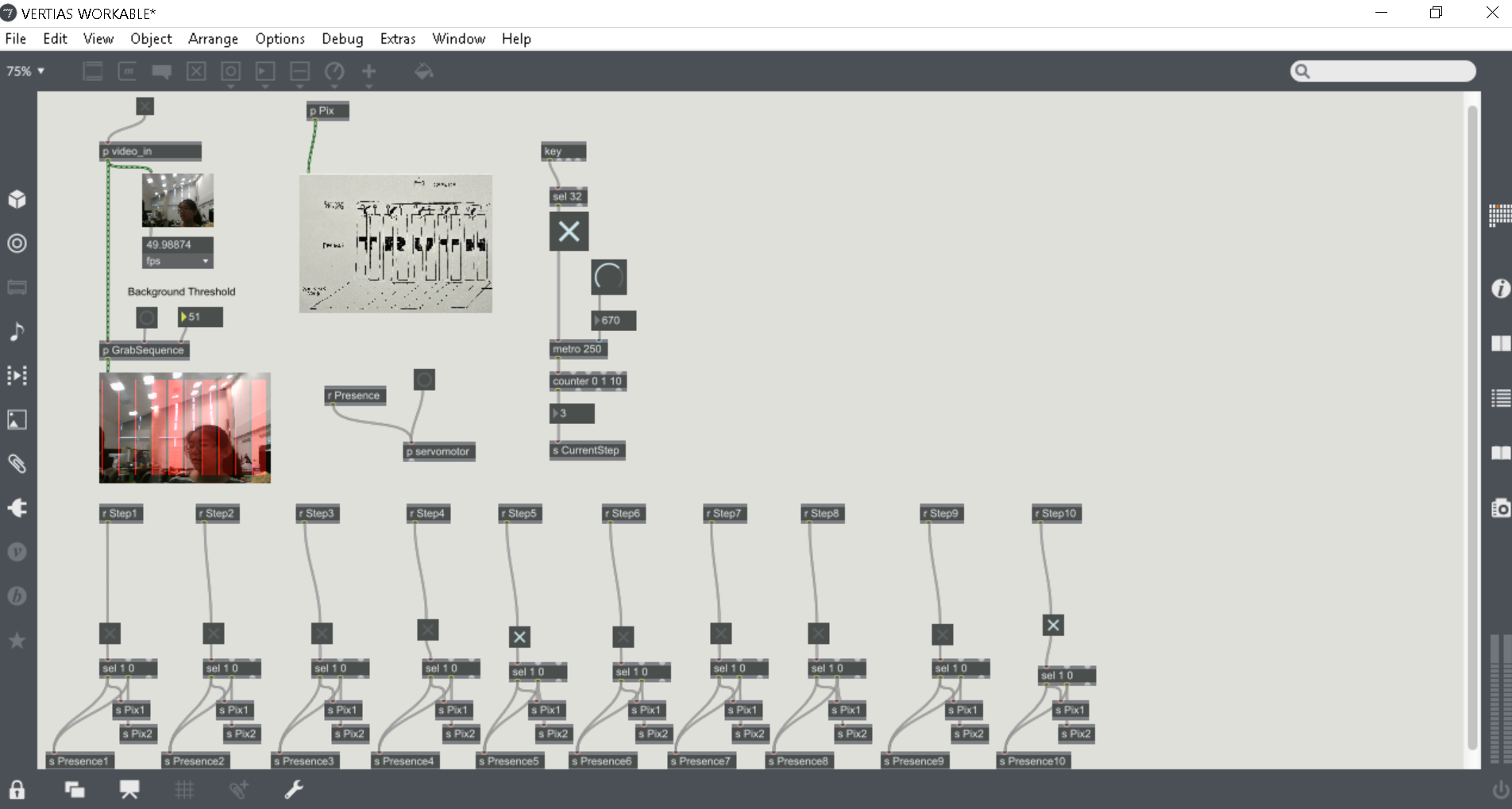
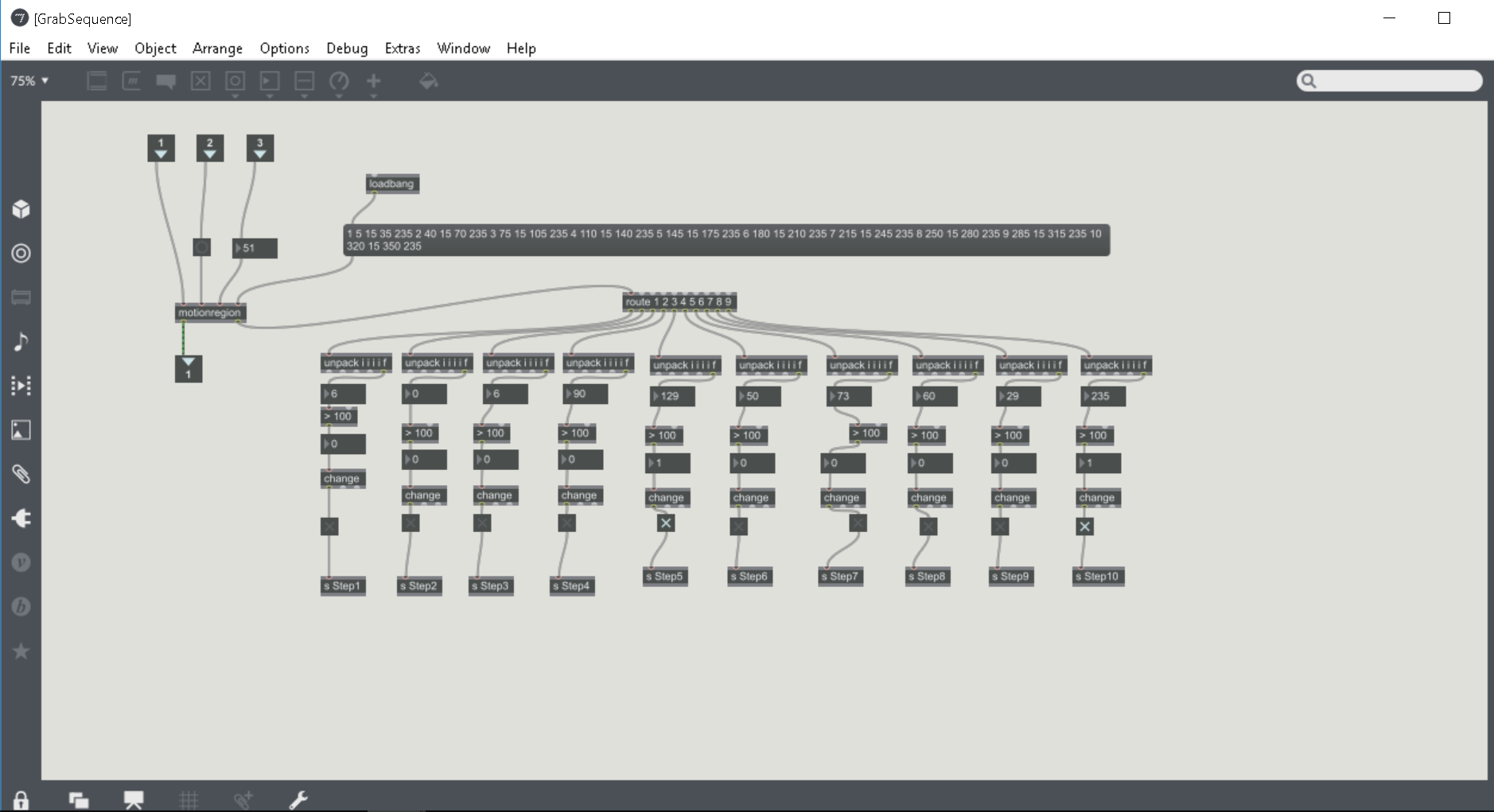
We adapted the Vejee motion region patch into specific motion regions for detection. We swapped the vejee photos to our sketches for checking purposes to see if it works. We also changed the sound system patch into a motor patch.
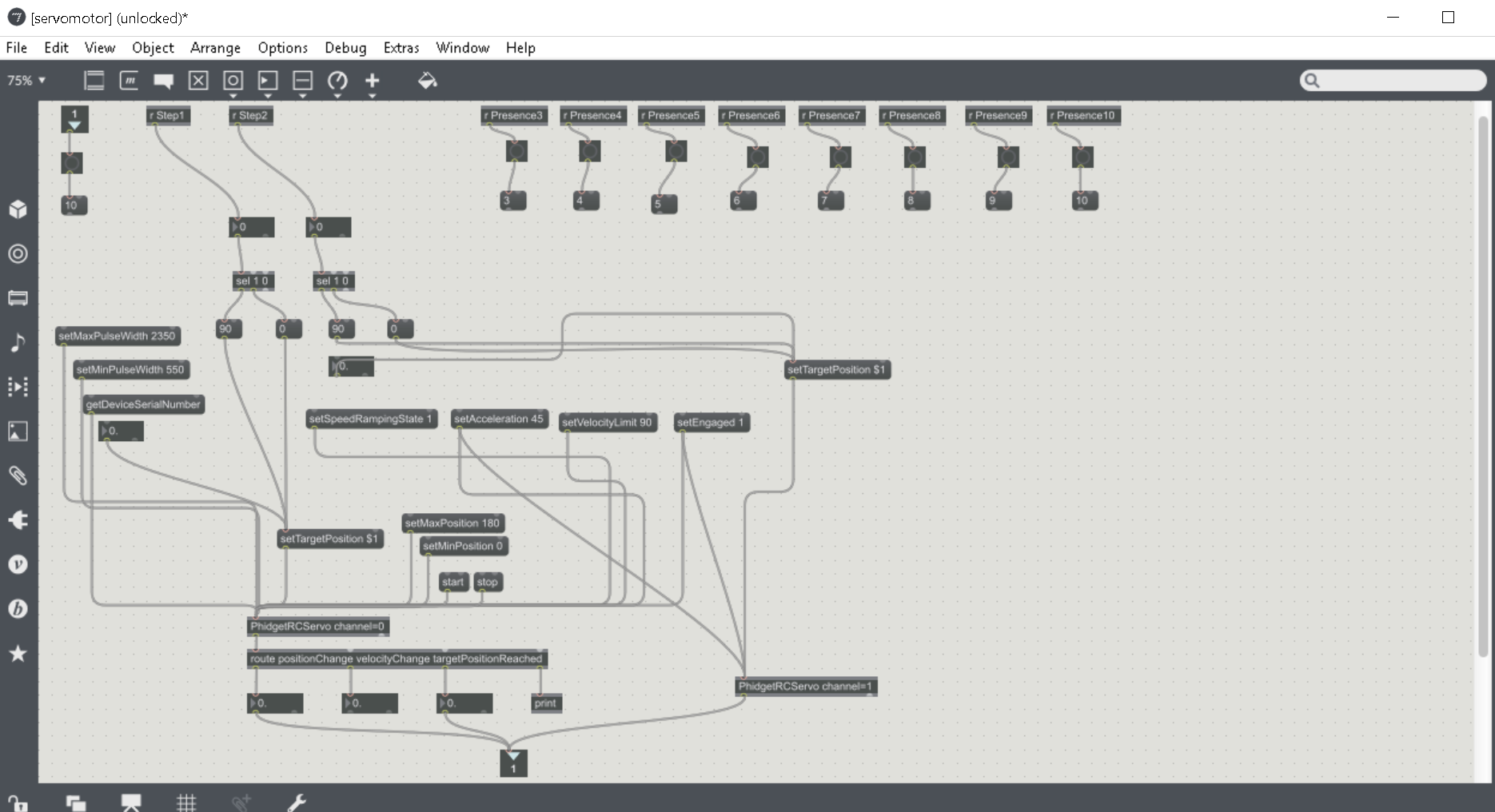
The motor moved a little slowly and I realised that it is due to the connection of our acceleration setting.
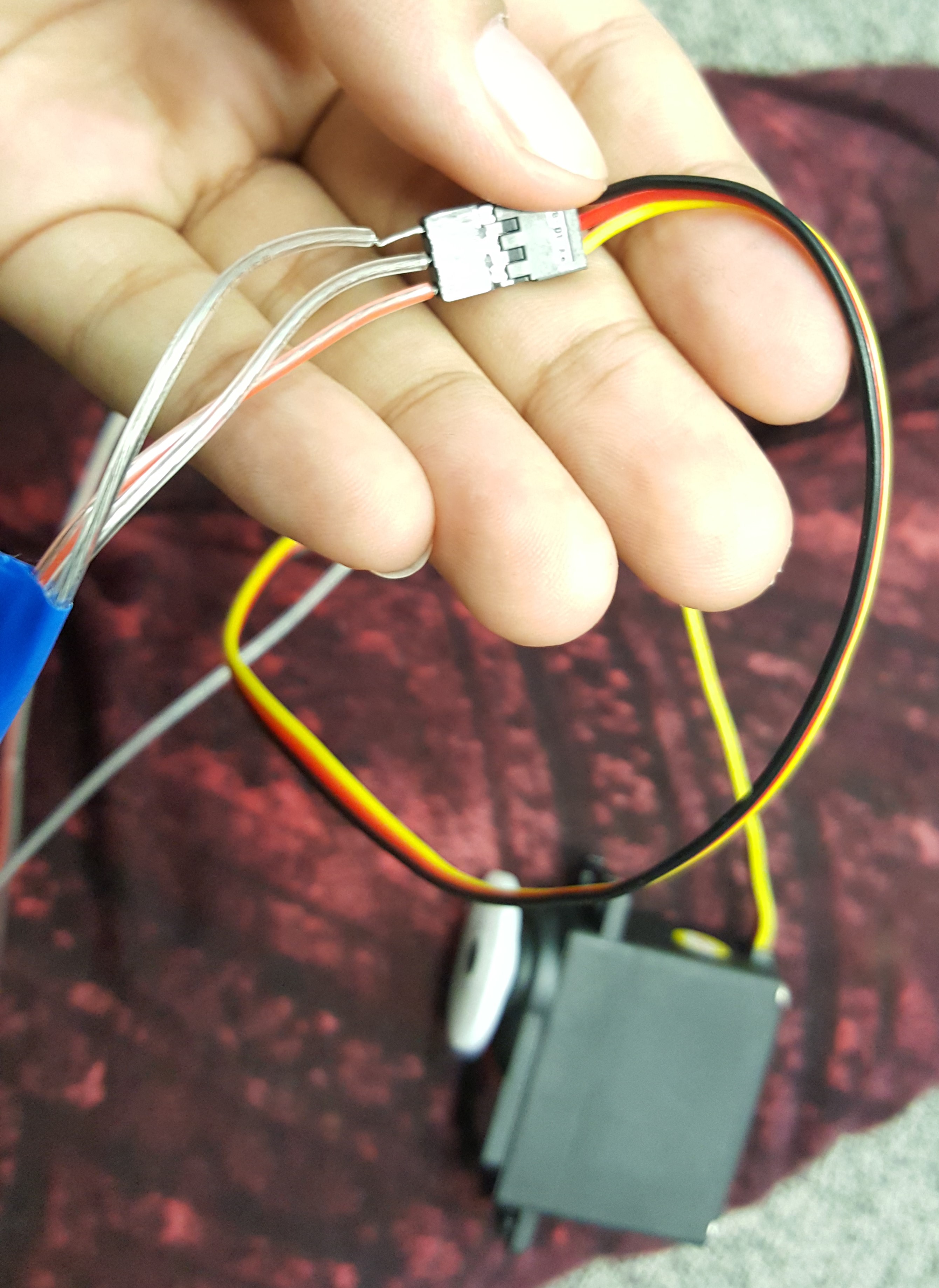
Due to the nature of our installation, we definitely need an extension for the wires connecting to the motors.
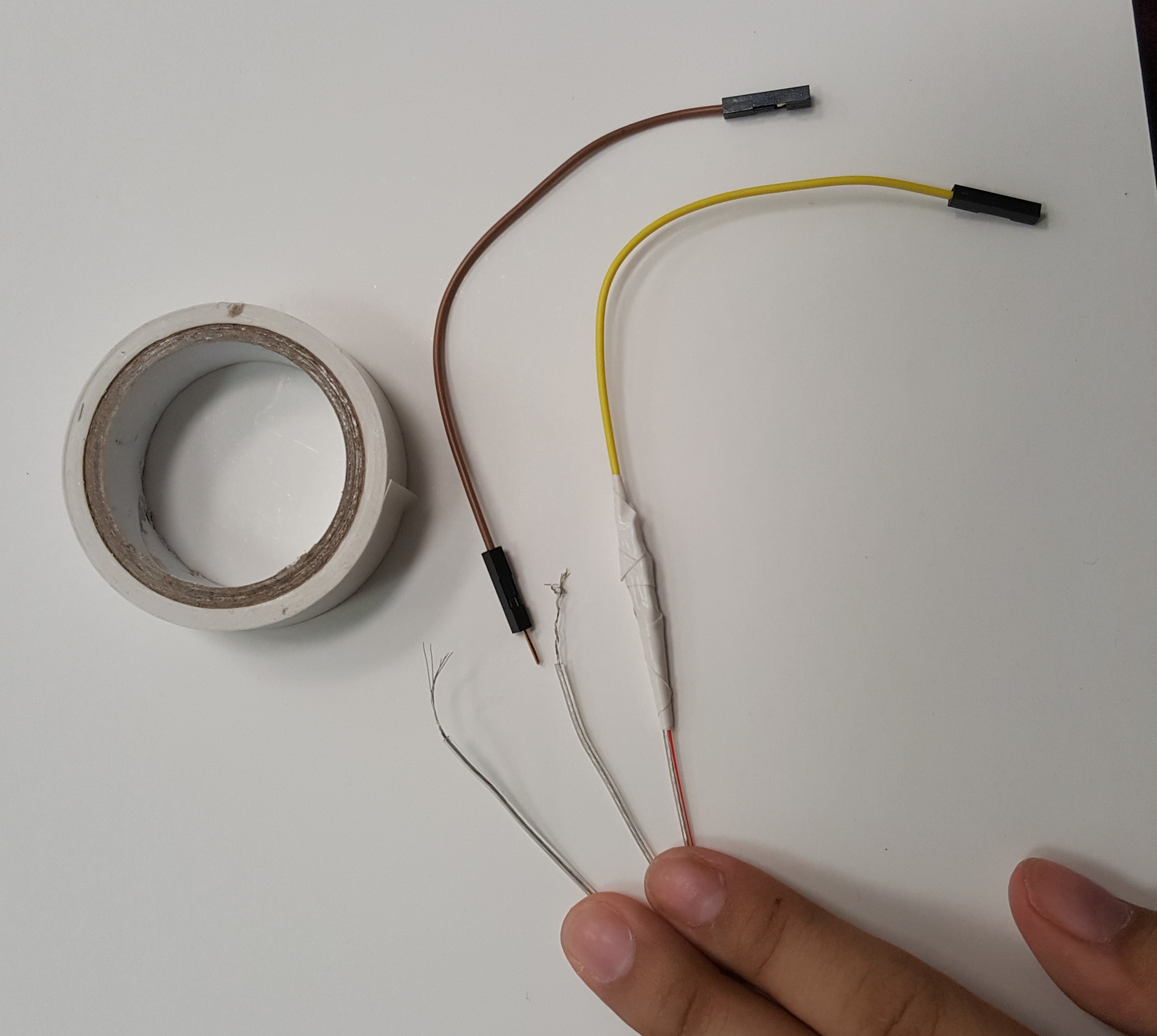
Connecting extension wires to male female wires.

This is how we managed to hang the panels for our prototype 1 with the foam designed as shown above, slotted into the gap of the metal rod.
This is the video for our prototype 1 which works according to the way we want it to. Although the prototype looks very rough in design, we will refine it further when we add a webcam and more motors to the panel. Meanwhile, we will source for other nicer looking materials for our panels, other than the foam board we are using now!
Our next steps would be to adapt the motion region to a top down position and adjust the size accordingly, and to design a cleaner and more proper version of the panels, and boxes holding the motors. We are also going to figure out a non permanent but sturdier way to connect the panels to the motors since we are going to need to return the motors after the project.