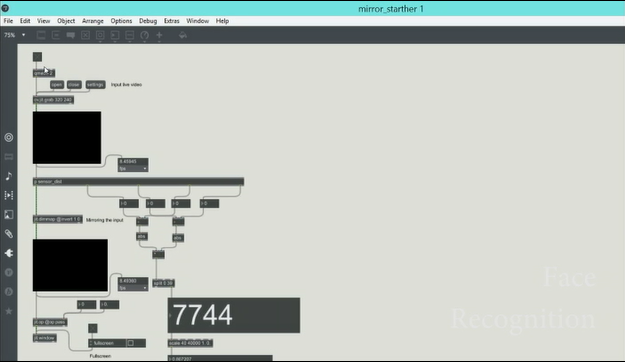
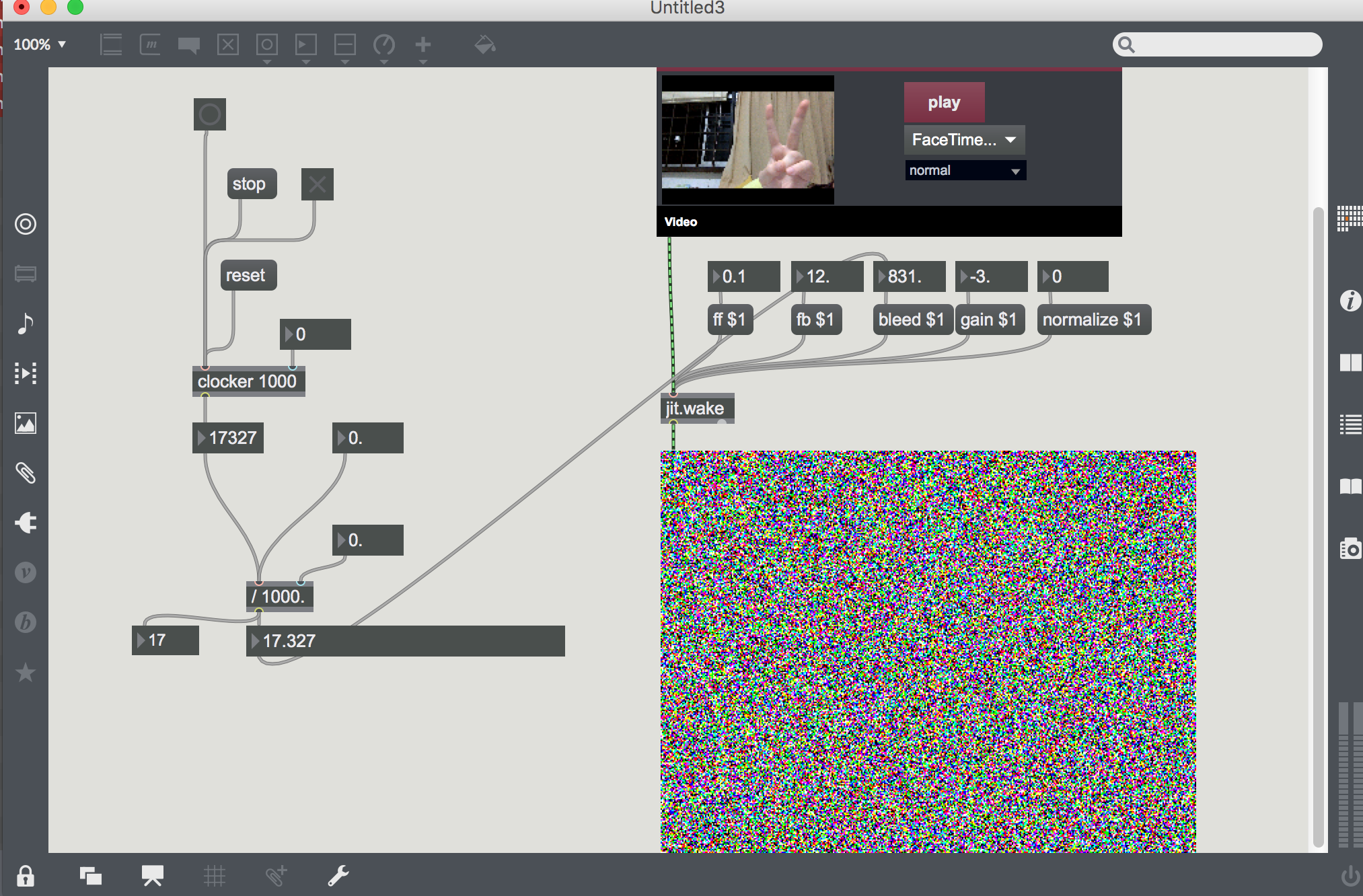
I utilised jit.wake, to create the varied glitchy effect, and will set a timer that will increase the glitch accordingly. The glitch is still quite patchy for now, and I am trying to use smaller increments to let the glitch form slowly (not seen from video).
As for the project (concept’s) updates, I did think of using repetitive motion which would be boring for viewers, but at the same time would really poetically bring out my artistic stance. I will however, be changing the project’s layout due to the more flexible arrangement and feedback given by Prof Randall.
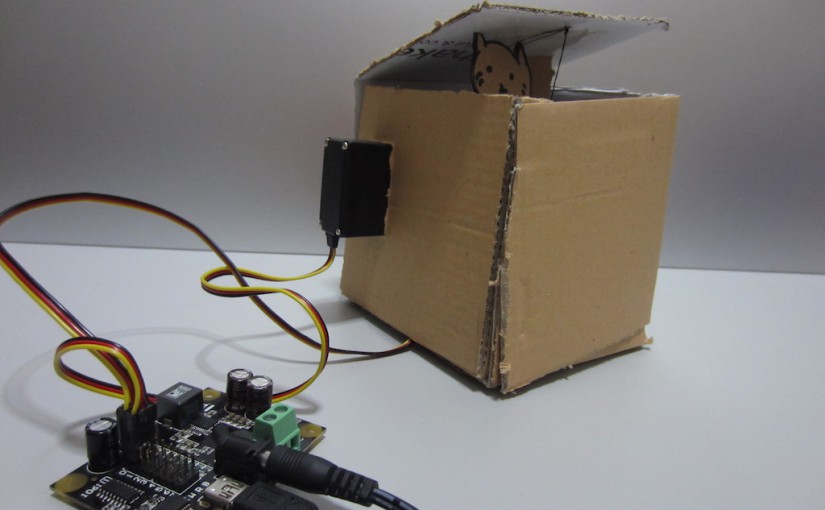
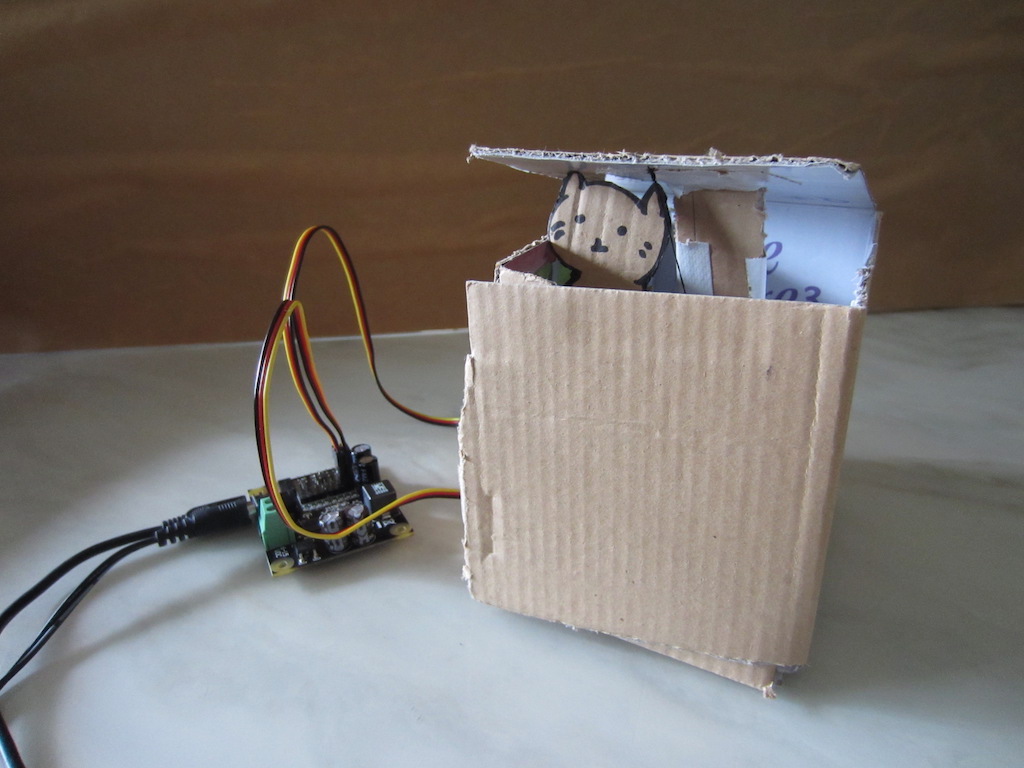
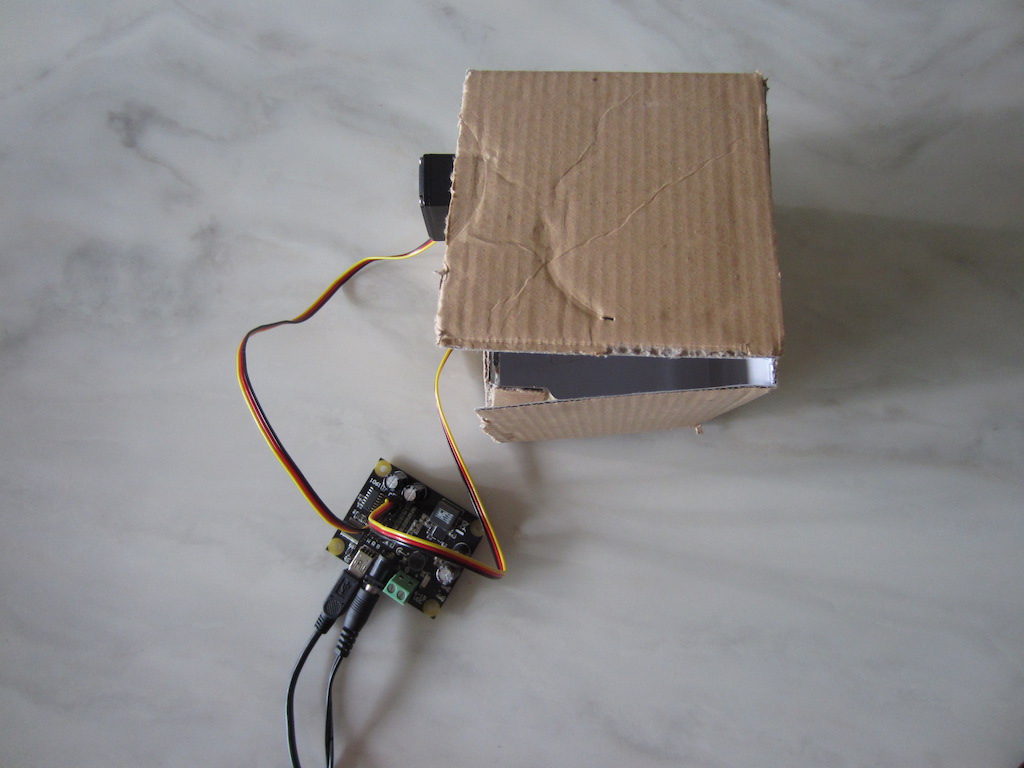
My little cat! Created out of recycled cardboard, with a mishmash of different scotch tapes. As in outer side of the cardboard has graphics printed against it, I decided to invert it, thereby cutting the box up and attaching them together to create my very own box.
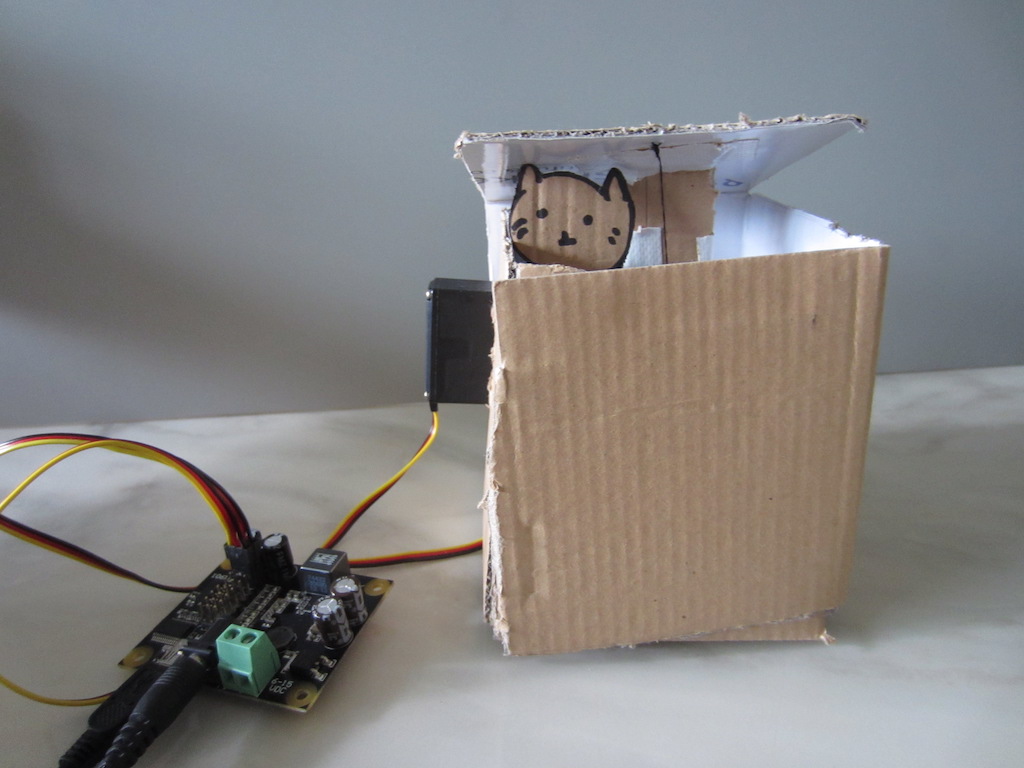
Strings pull the lid close, and the small piece of cardboard pushes the lid up. The cat itself was a makeshift shape of a cat.
As seen. In total, I used 2 servo motors – one to control the cat, the other to control the lid. Perhaps, with better crafting skills, I would be able to cut the number of servo motors down to one. To do this however, I require a larger box – currently, the box is palm-sized – and more ‘attachments’ to attach the cat to the handle/gear that pushes the lid open. To simplify things, I decided to do without it.
Peekaboo! The cat comes out a few milliseconds, after the lid opens.
Attaching the cat box to MaxMsp via a cable.
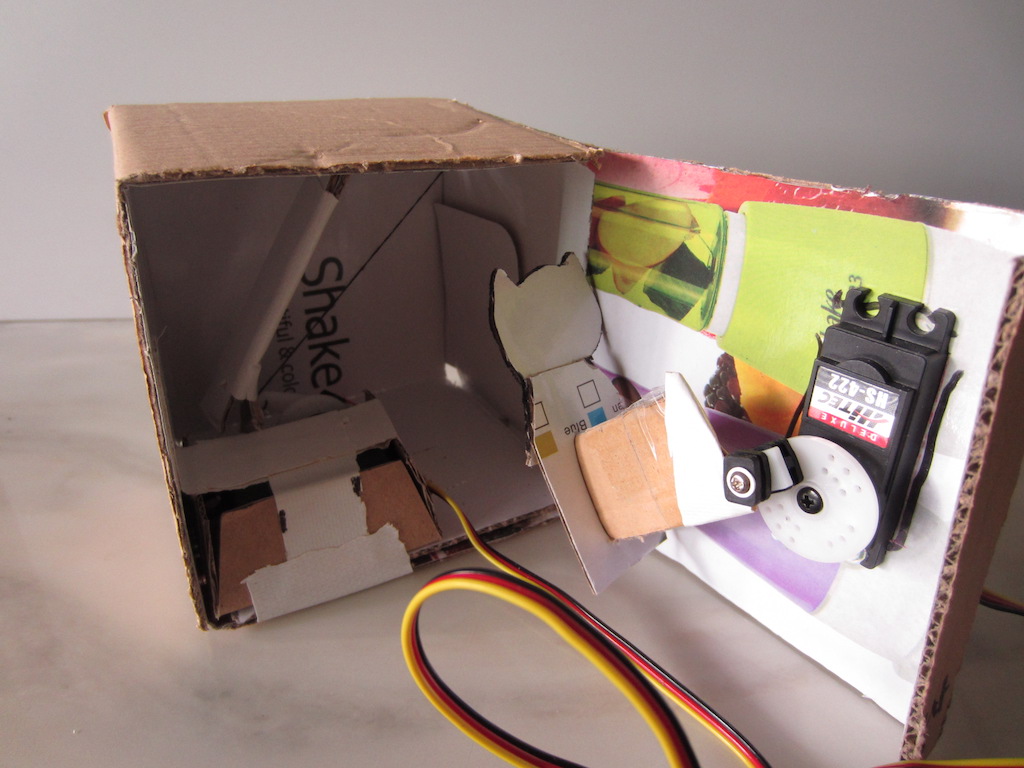
The inner workings of the cat box – one servo motors is raised in the air, the other attached to the ground.
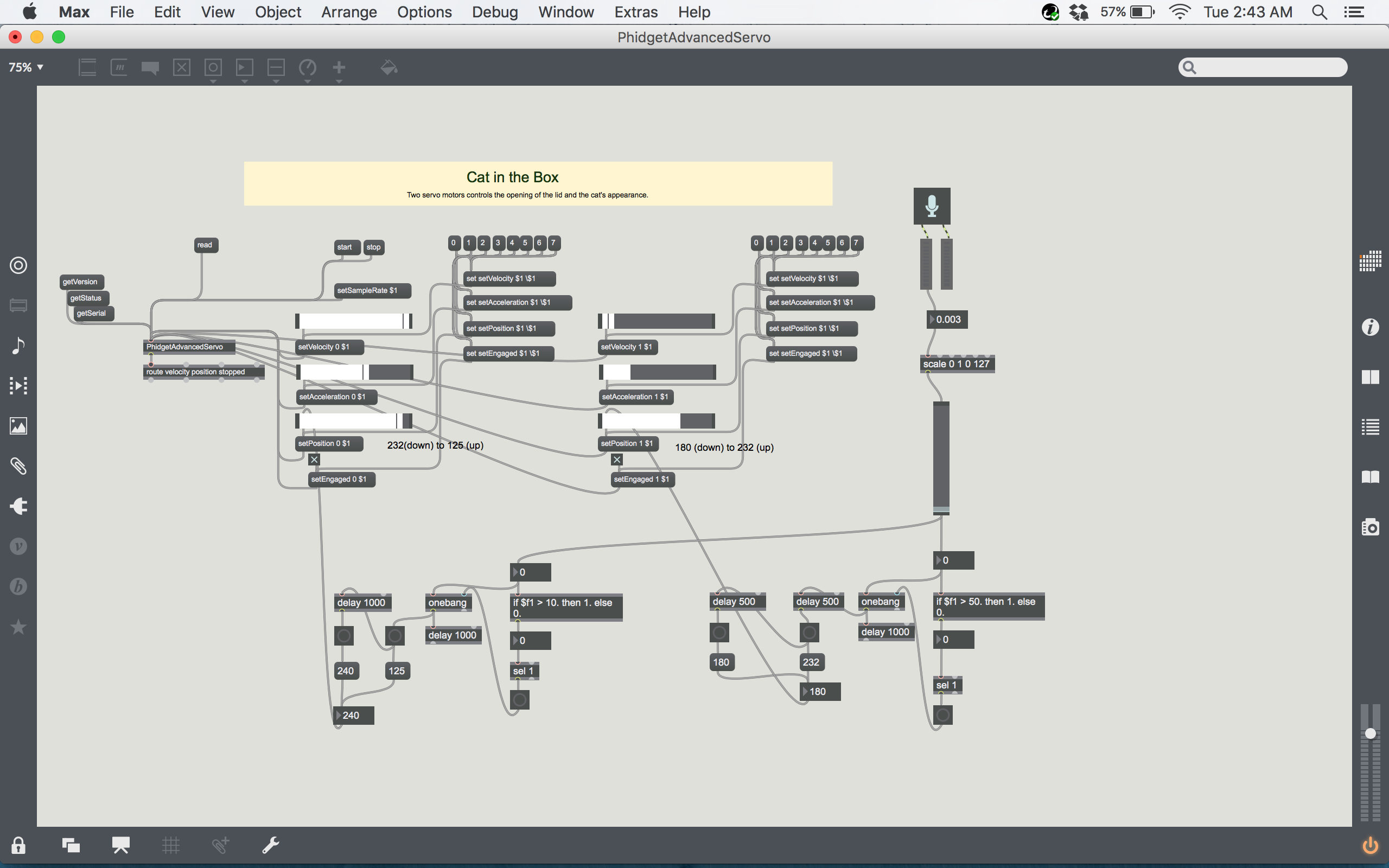
When one speaks to the box, the lid opens – but no cat in sight! For this is sure some shy cat. Hence, speak louder, but what you say does not matter. The cat will appear for a short while, then disappear, if the threshold volume has been reached. Otherwise, only the lid will open.
See it in action:
In hindsight, I would have included an additional feedback – where the cat would mew back at the user, via an added soundtrack into the max patch. Pertaining to the documentation, I would have also put in human interactions (which I forgot to record earlier) – perhaps, of the user drumming the lid of the box, or attempt to catch the cat.
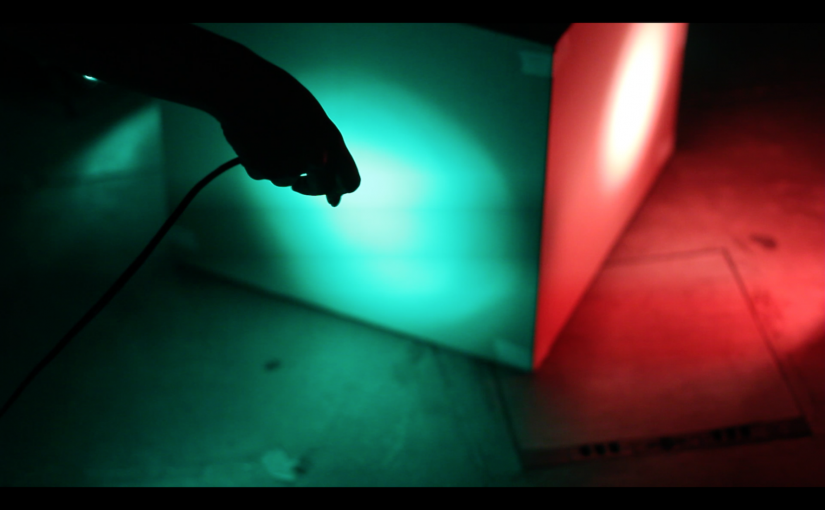
This prototype is a further development of the previous ‘swish the sound’, with the addition of chauvet lights.
When the gyroscope is tilted at an angle, there are two responses:
1. Sound is played at the angle the gyroscope is tilted at, and
2. Red light intensifies at the corner the gyroscope is tilted at, washing out the green
Sound is created by using ambisonic, while the control of the light was made by scaling the x and y coordinates of the gyroscope.
Scaling of the gyroscope was slightly different (ie. improved) from the previous sound/graphics/gyroscope patch. Now, the greater the tilting of the angle, the greater the intensity of the red lights. However, several improvements could be made:
alike to ambisonics, which had a smoother transition when the gyroscope tilt changes, transition between the different chauvet lights could be smoothed out.
perhaps the intensity of the ‘chosen’ chauvet light could also be dimmed – this I tried, but could not successfully manipulate the lighting such that it stopped blinking (ie. setting the minimum threshold)
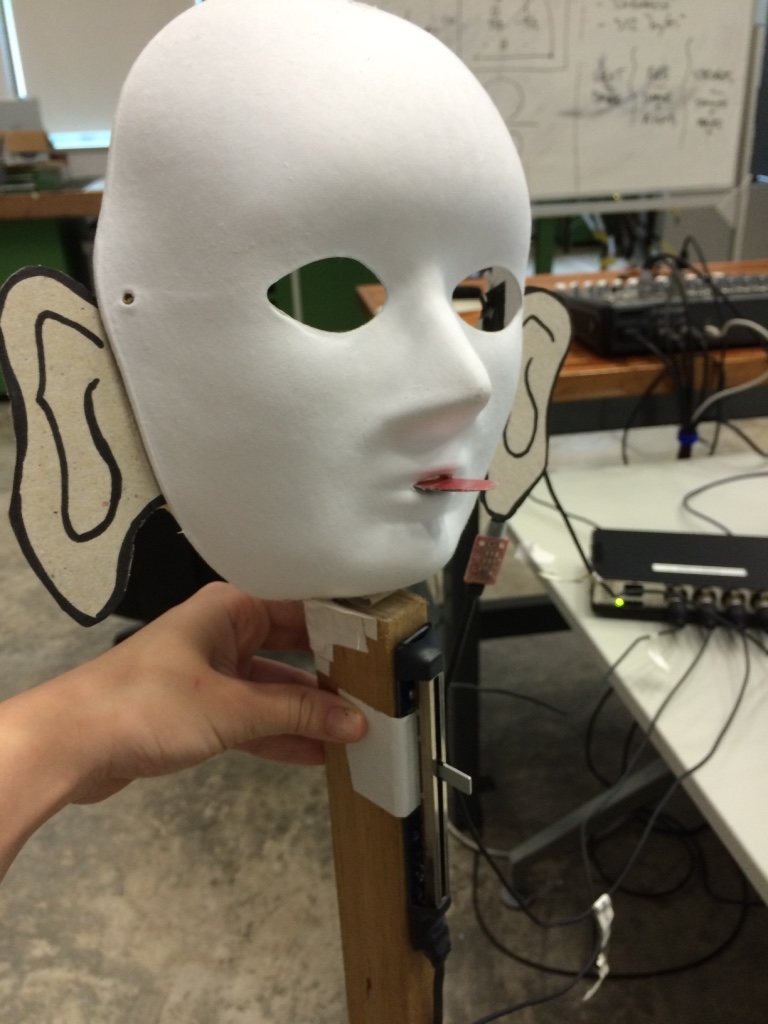
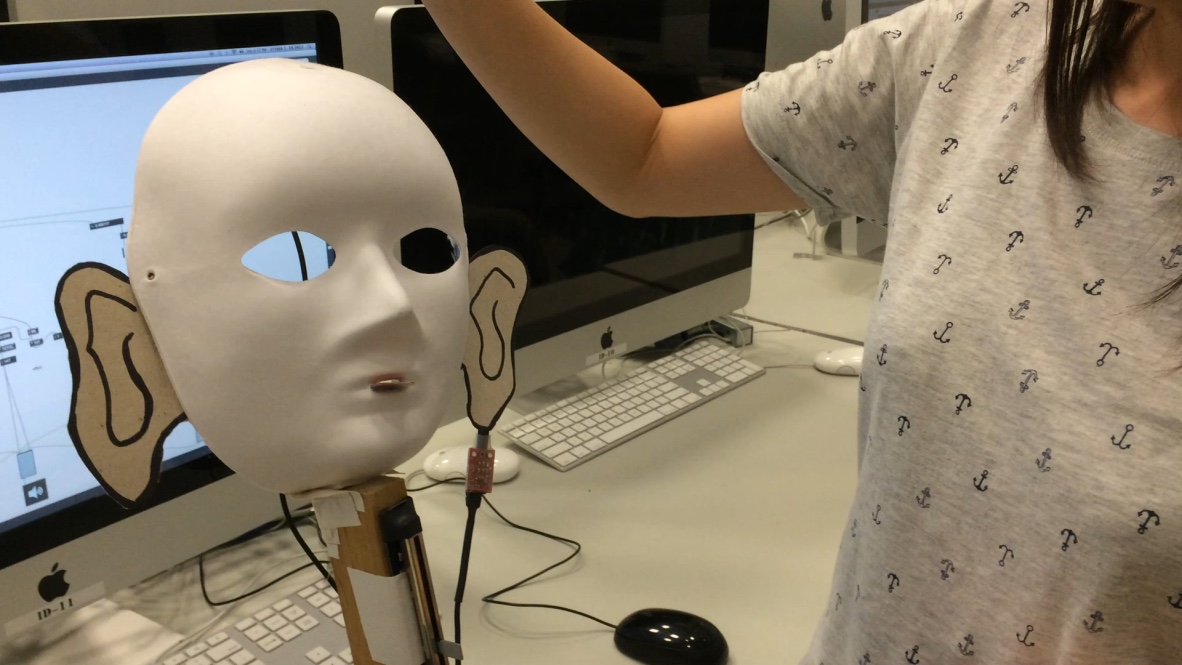
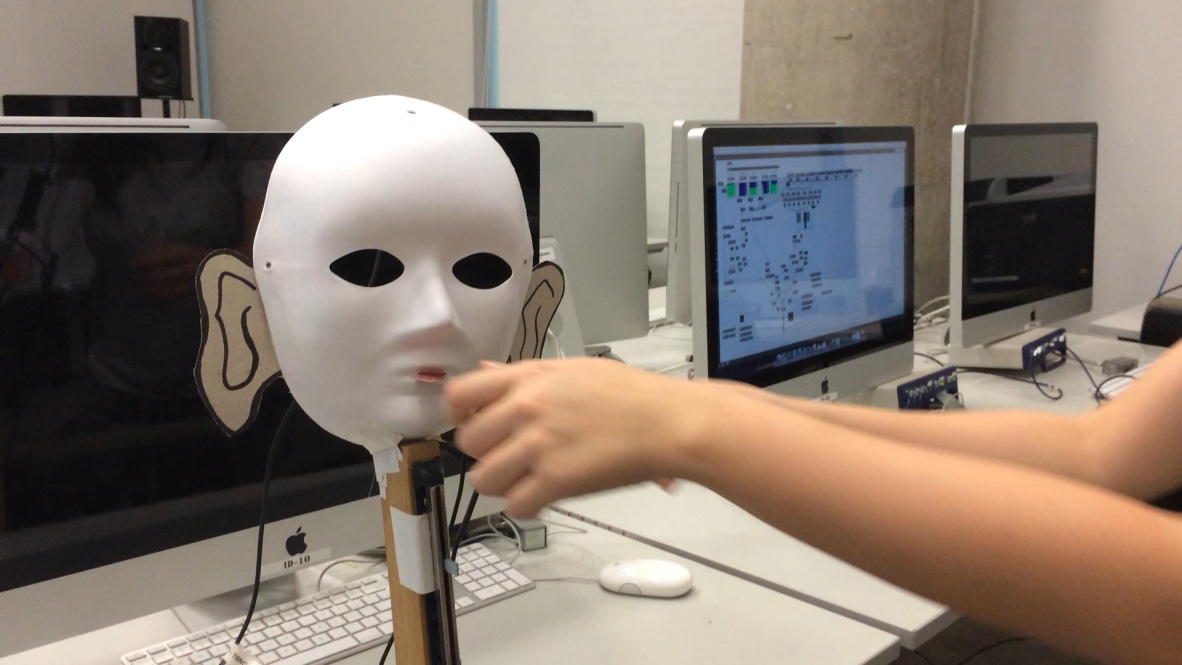
Depicted above is the final prototype of the tun-tun.
Functions are as stated (from top-down):
Tapping top of head – triggers a beat once
Pulling of left ear – controls the volume, and triggers the melody once
Pulling out/pressing hard on tip of tongue – triggers a voice on repeat, pull it out again to switch it off
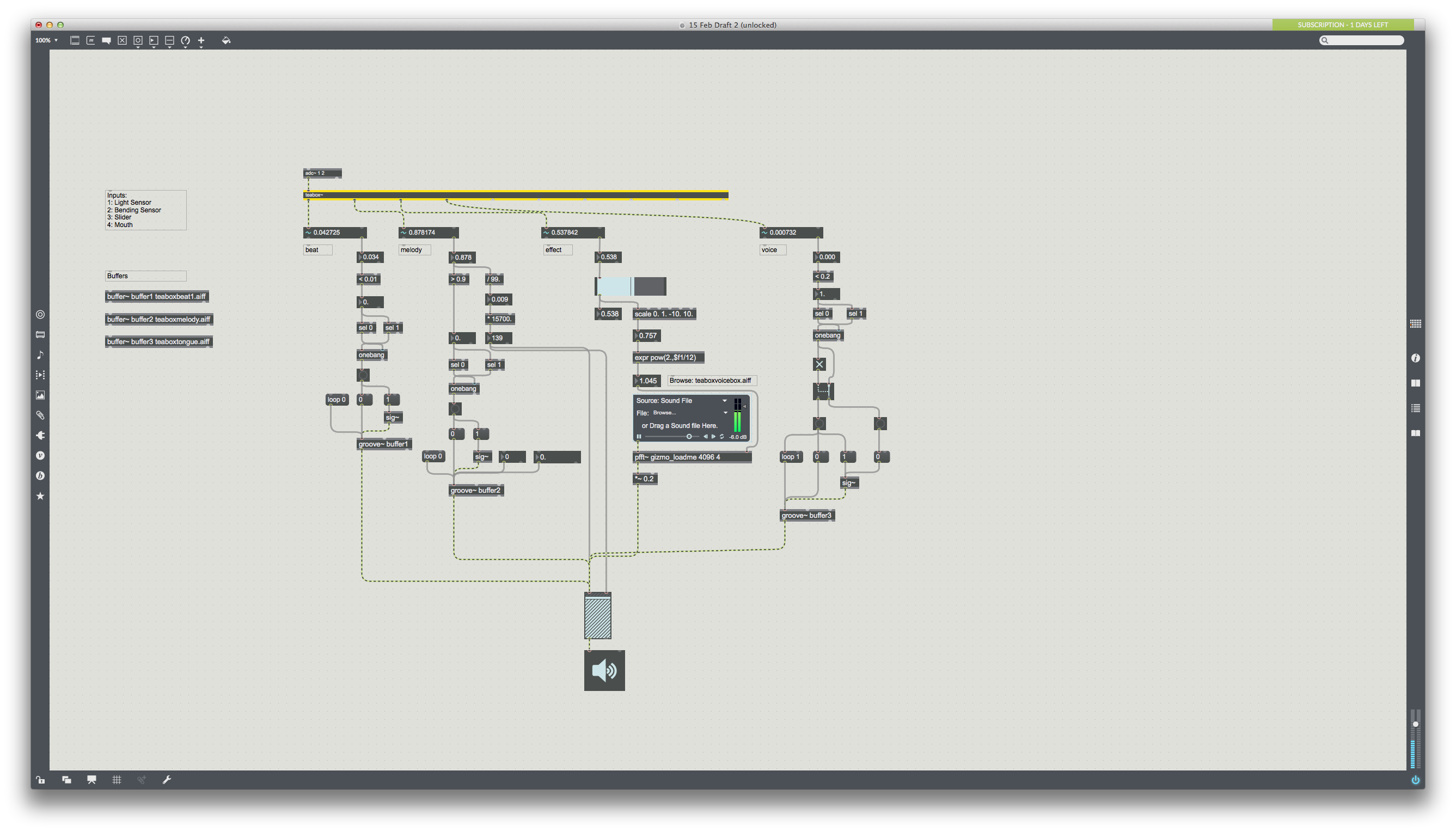
Slide the “voice box” up and down – change the pitch of the sound effect
All sounds are recorded in real-life; however, they do not sound melodious when mixed together. New sounds can be input(ed) to replace the current sounds.
Physically speaking, the product stands at my chest-level.
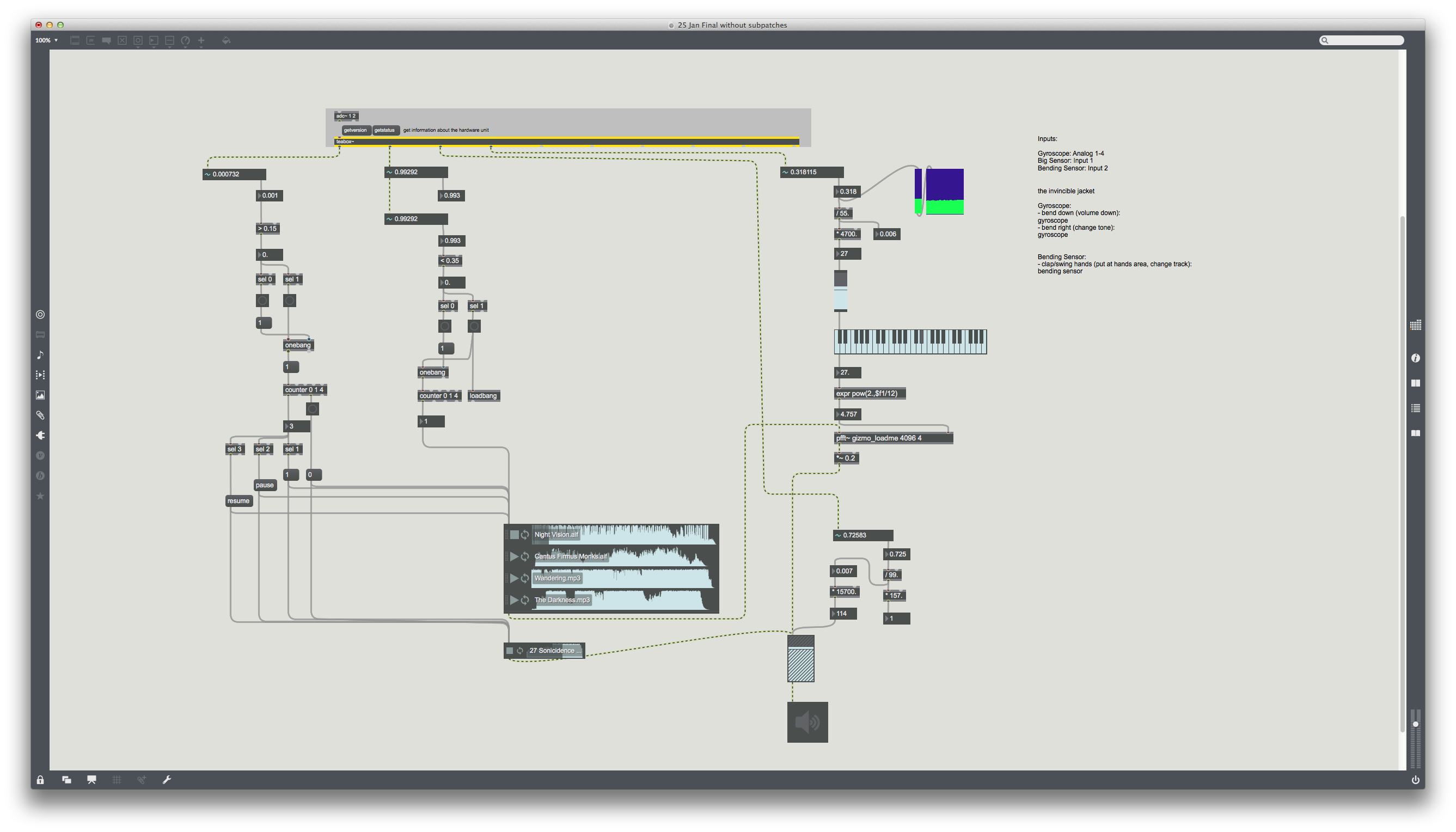
Use of controls to ‘play a radio’ from a playlist. Overall, there will be background music (Soincidence soundtrack) playing throughout the entire duration, while toggling various aspects of the sensors (jacket) will trigger an additional sound to be played, as seen from the playlist above.
Sensors/Feedbacks:
Pressure Sensor (large) placed in pocket:
Switch it on and off, pause, resume
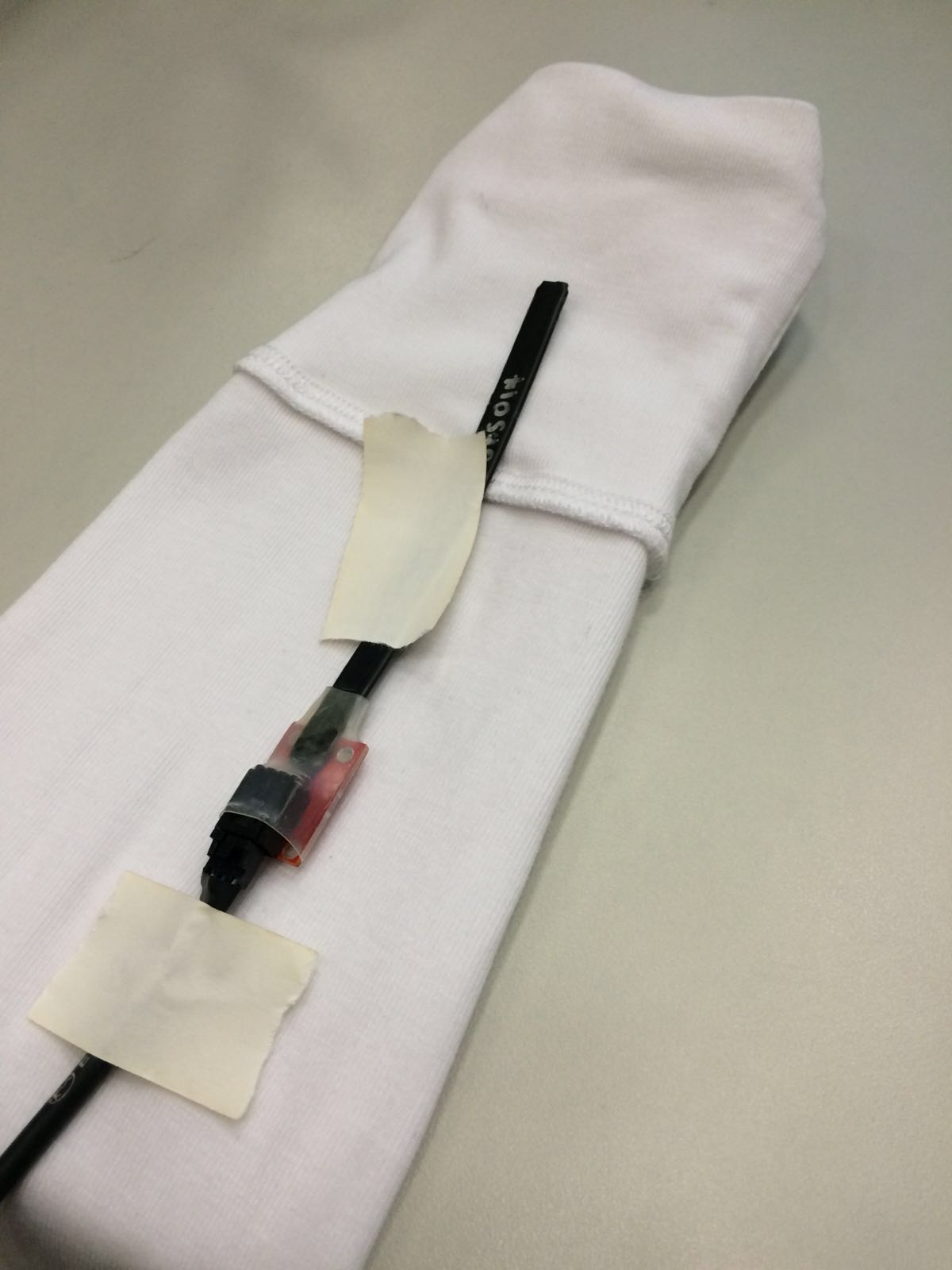
Bending Sensor placed at wrist:
Bend Wrist to change tracks
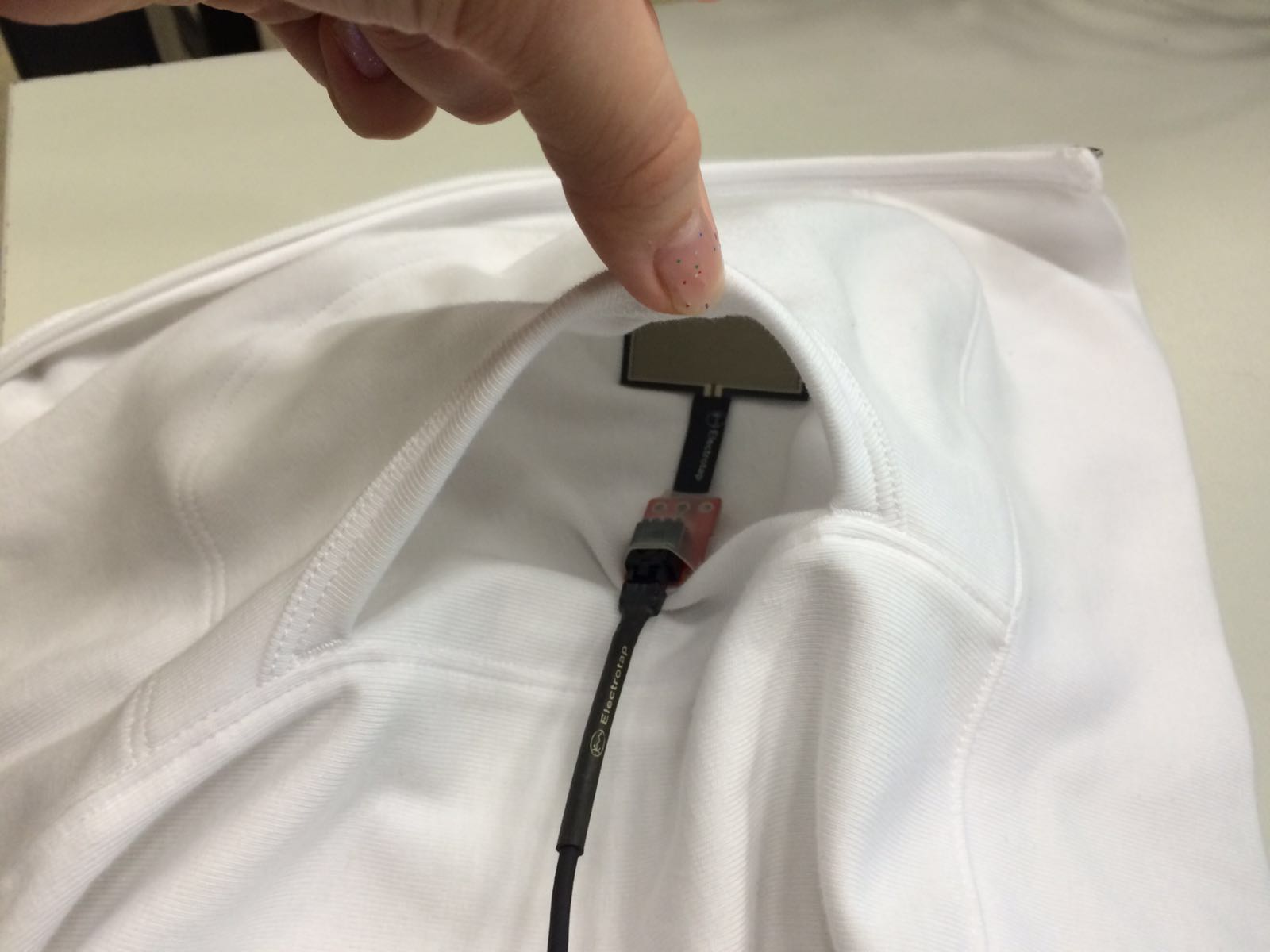
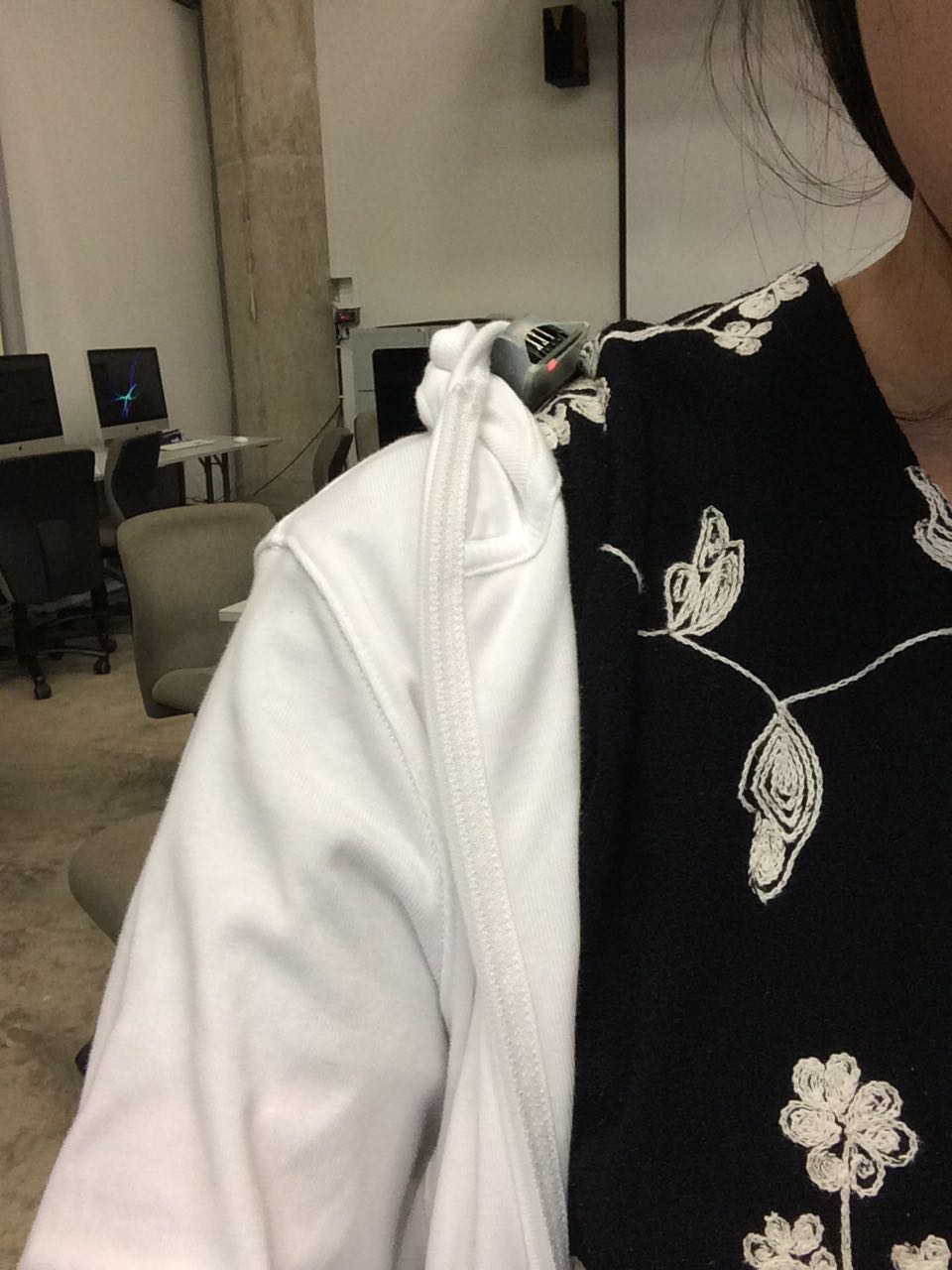
Gyroscope placed at nape of neck:
Function 1 – [Front/back] Bend back and forth to change volume (The more you bend, the louder it is)
Function 2 – [Right/left] Bend to your right to change pitch (high pitch with more obvious bend)
Combine all actions and create your own unique song.
Comments, and reflections:
Prof Demers commented that having the actions not ‘fixed’ by physical boundaries will allow for greater freedom, and subsequently, more ‘fun’ in playing with the jacket. However, it is risky as the feedback is harder to control
Creating 2 different feedbacks for the gyroscope is not ideal: while activating one function, the other function is also inadvertently activated (unwanted feedback)
Difficult to control 2 feedbacks which requires somewhat similar actions to activate (for gyroscope to change pitch and volume)
Swinging hands to activate bending scope was unnatural
In reflection, perhaps limiting the scope, or narrowing the threshold for activation would help control the feedback, and simplify ways to activate the feedback
I could incorporate the zip/hood of the jacket, etc. zipping the zipper, or wearing the hood
Perhaps some sensors could be placed on the body of the user, instead of solely on the jacket as at current





![“Music Instrument” [the Tun-tun]: Final Product / Assignment 2](https://oss.adm.ntu.edu.sg/ttay004/wp-content/uploads/sites/542/2016/02/thumb_IMG_1003_1024-825x510.jpg)




![“Radio” [the Singing Jacket] / Assignment 1](https://oss.adm.ntu.edu.sg/ttay004/wp-content/uploads/sites/542/2016/01/Screen-Shot-2016-01-26-at-4.04.09-PM-825x510.png)