
A very, very Quick Catch up!
This post will just be a very brief update on the progress of each different aspects of the installation!
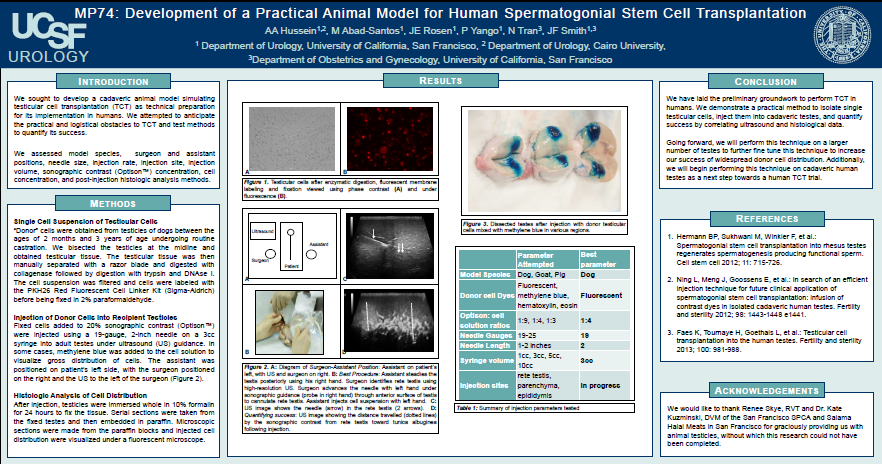
Firstly, let’s talk about the layout! My proposed space would be a slightly rectangular space, with content to be projected/hung/attached/displayed on all 4 walls. My drawn layout can be accessed here: FYP Diagram(edited final).
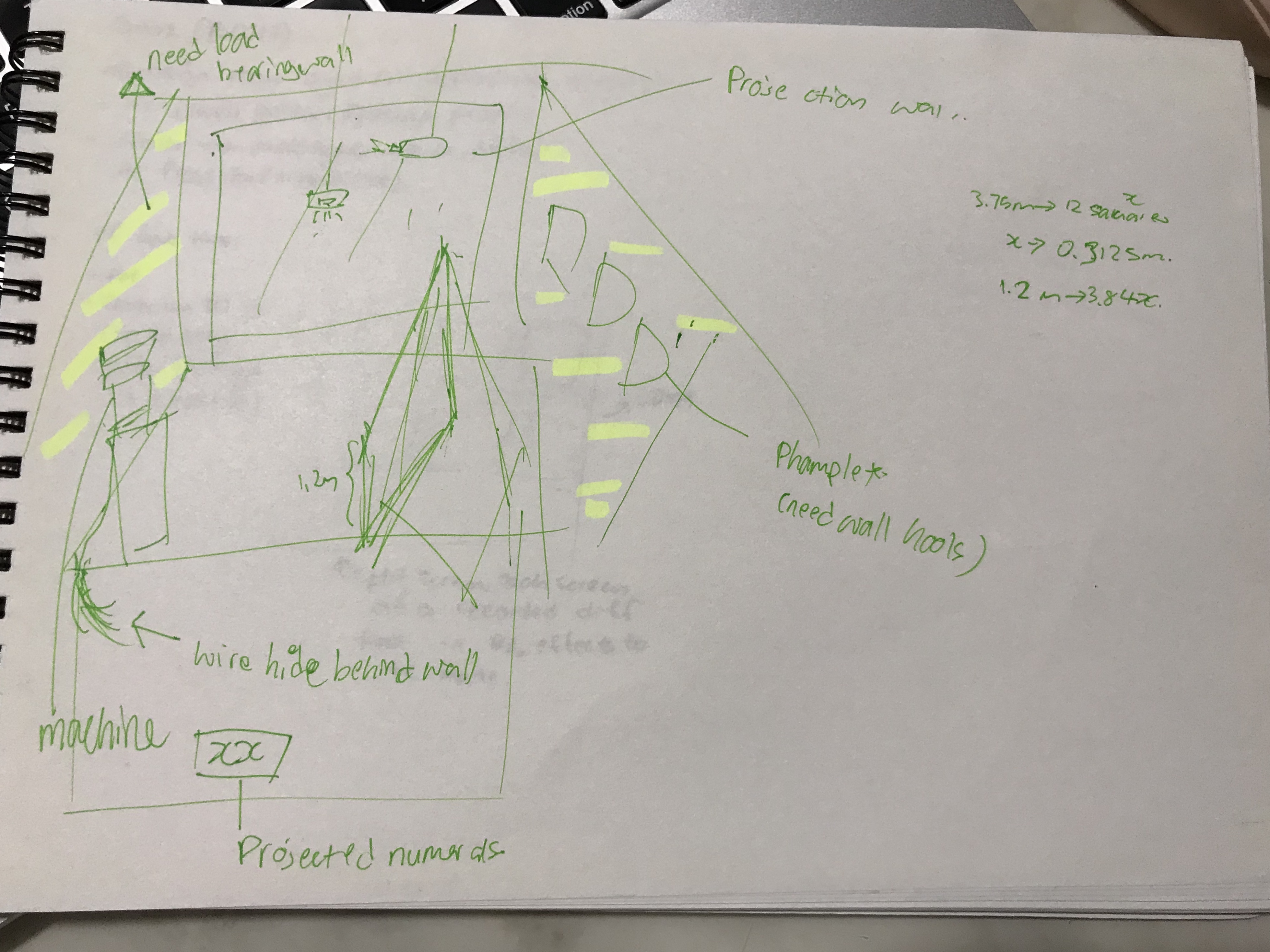
Otherwise, as seen in the above rough sketch, I would be placing:
1. x 2 projections
2. x 1 moss machine
3. Phamplets, memorabilia
More details could be seen here: Presentation Summarised
FYP Group Presentation with all Professors
Today, the IM cohort had a group presentation with all the IM professors. My presentation slides can be found here: Presentation Summarised
Moss Procurement Updates!
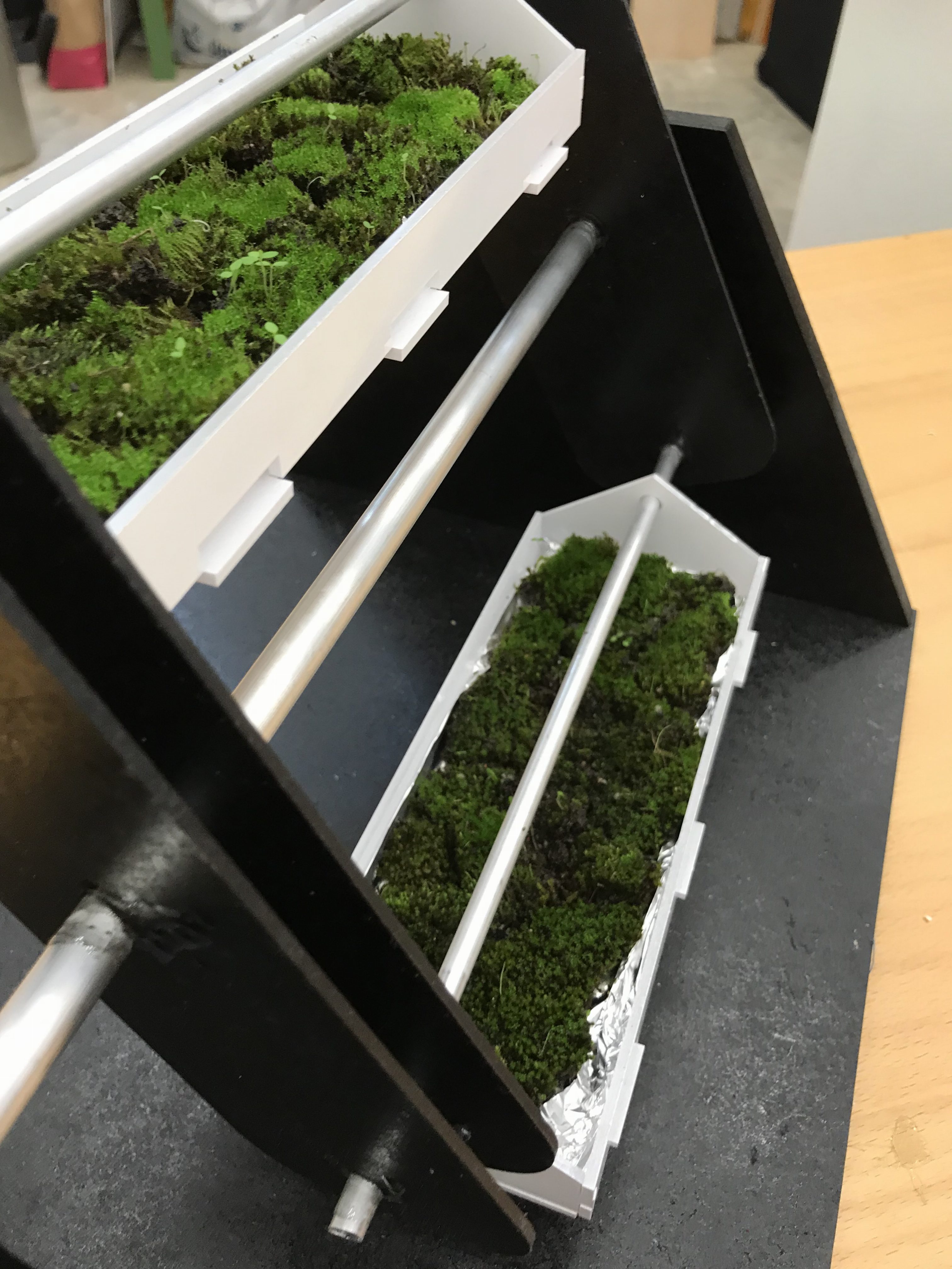
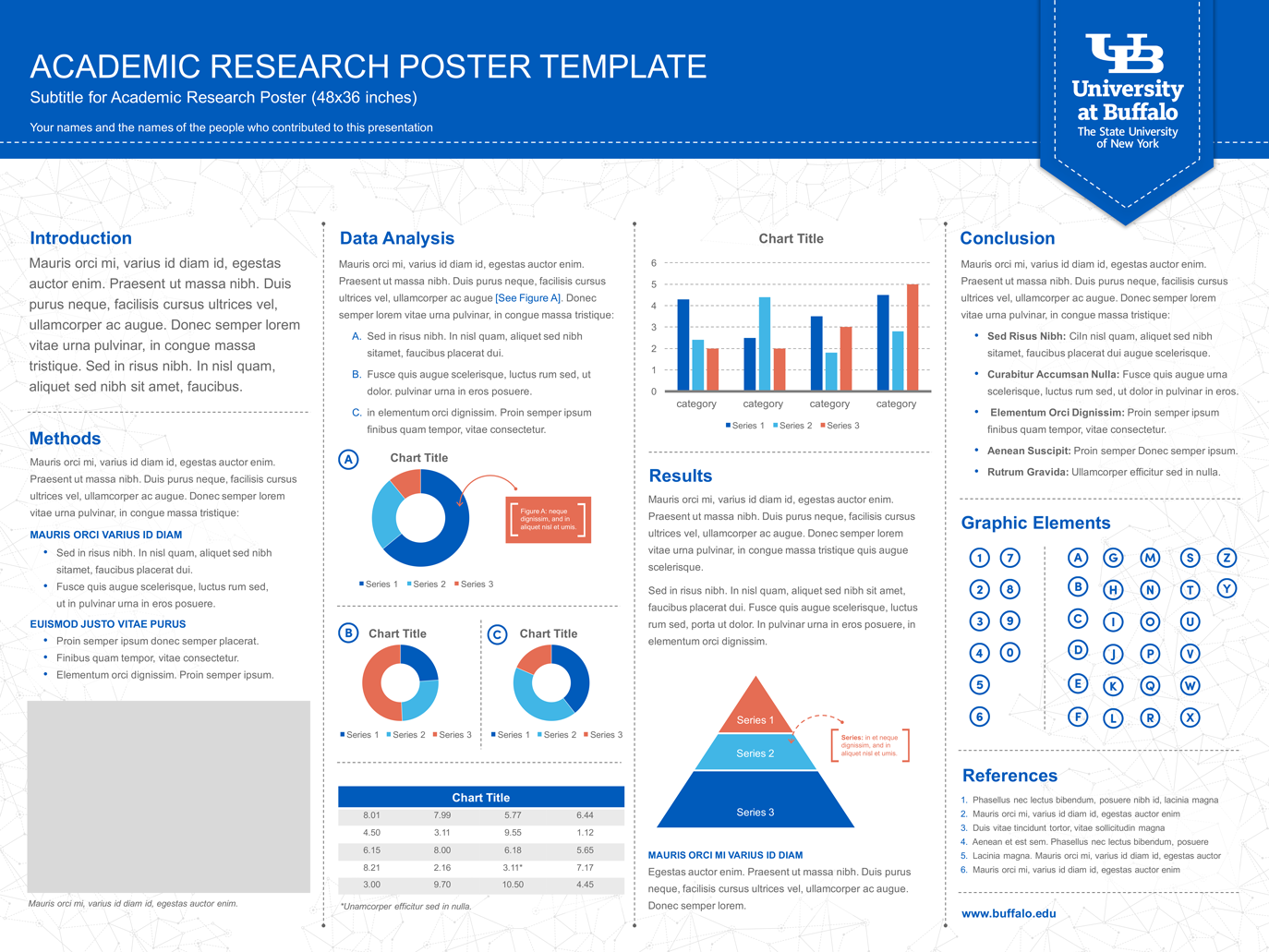
In my last post, I did mention that I would resort to buying the moss! Luckily for me, I chanced upon large quantities of this very amazing moss species on a quick trip to Malaysia which would fit the theme! However, I only managed to smuggle back enough quantities for it for the prototype itself only, and not for the final installation machine.

Referencing the above close up picture of the moss, I wish to draw attention to the individual stalks of each moss head – which gives additional texture and interest to the moss bed – perfect for what I envisioned.













As of now, I have a dilemma of whether to purchase commercially available Holland moss for the final machine or whether to return to Malaysia for the sole purpose of moss collection. Logistically speaking, I am also unsure if the border controls will allow me to ‘mass import’ their local flora back to Singapore.
But for this final prototype, I have decided to affix it with this particular species of moss.
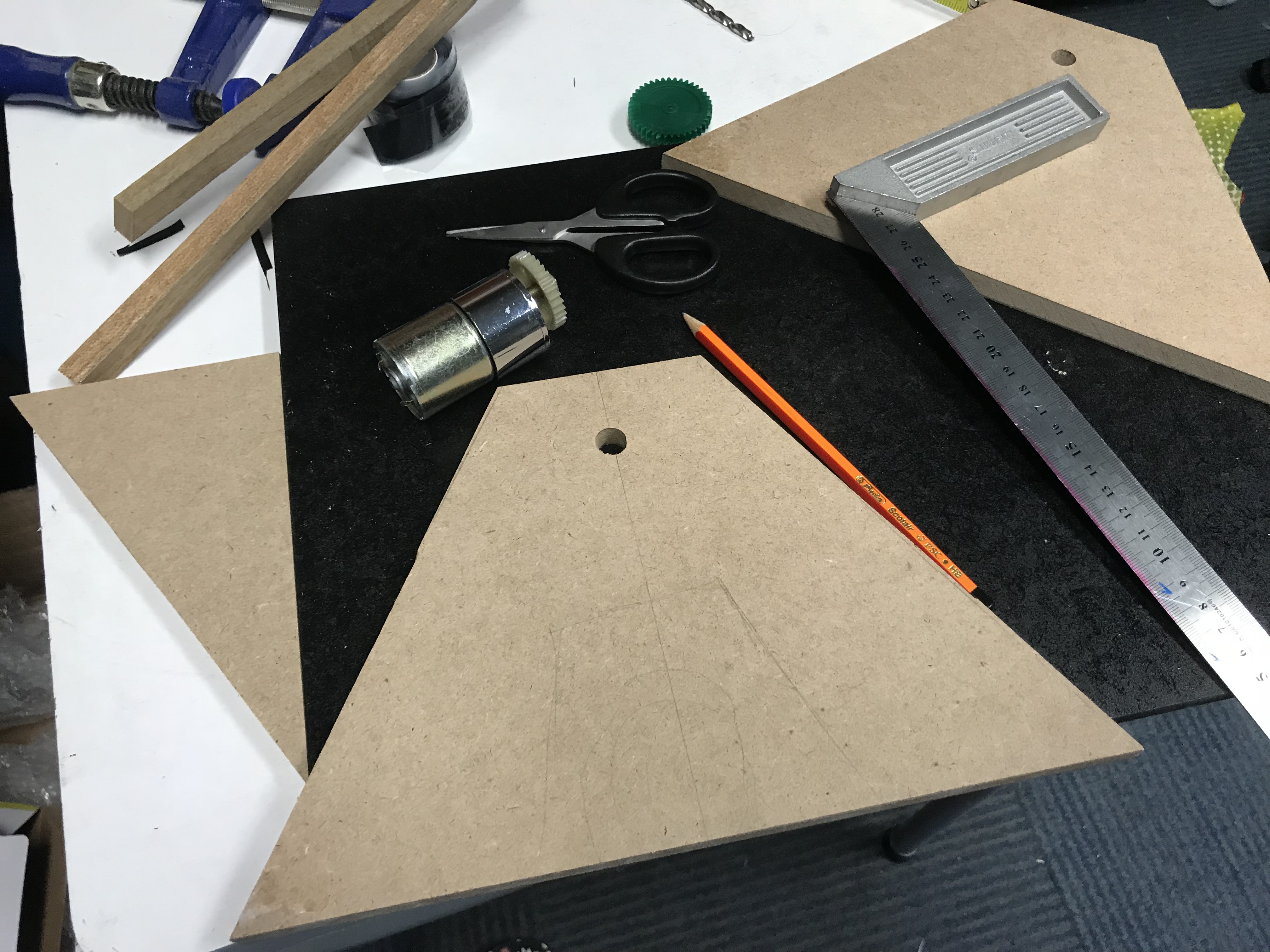
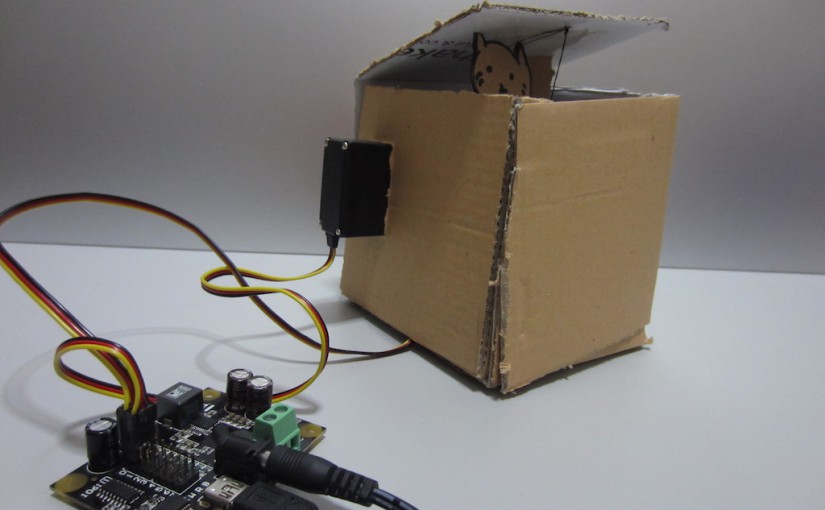
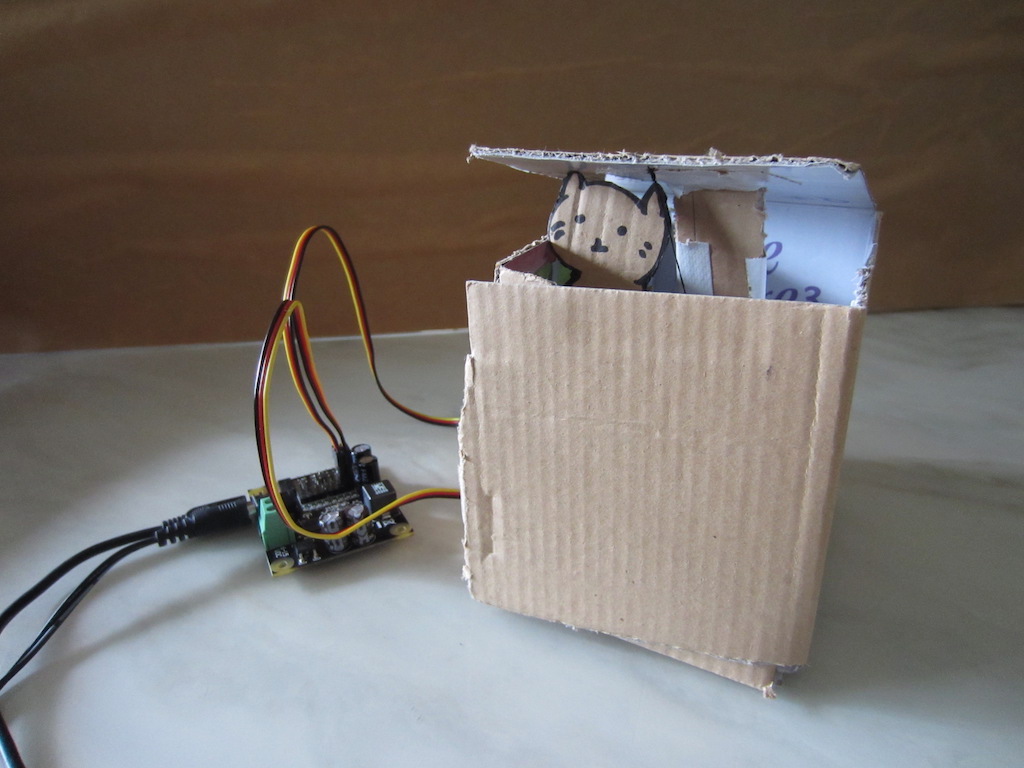
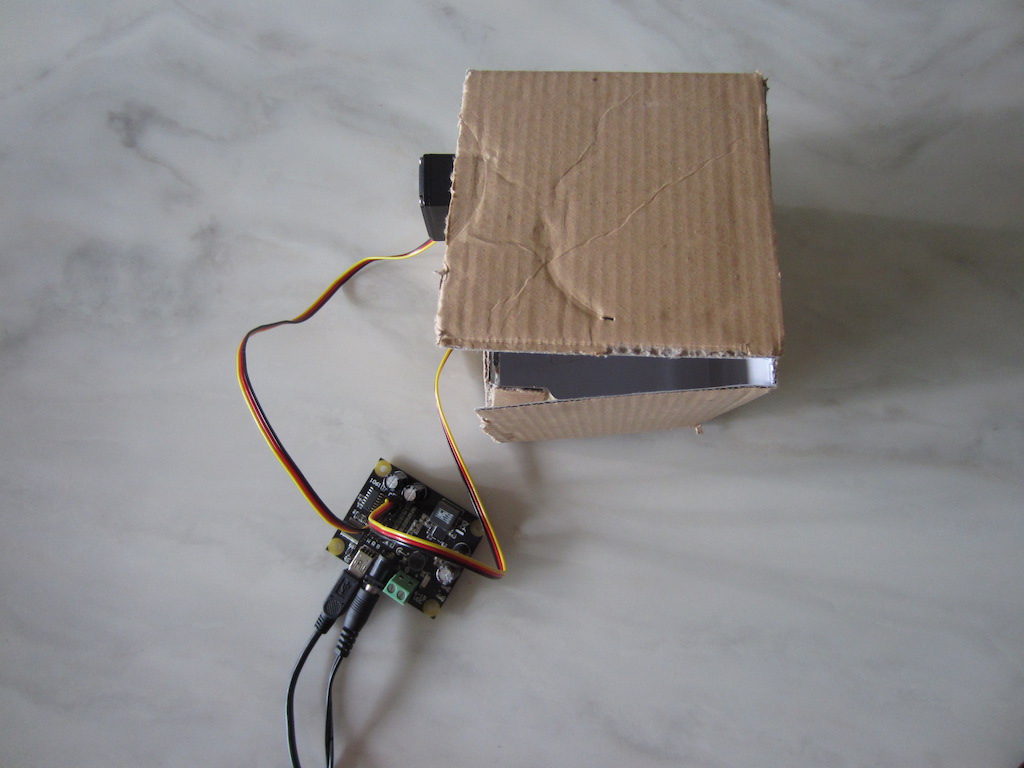
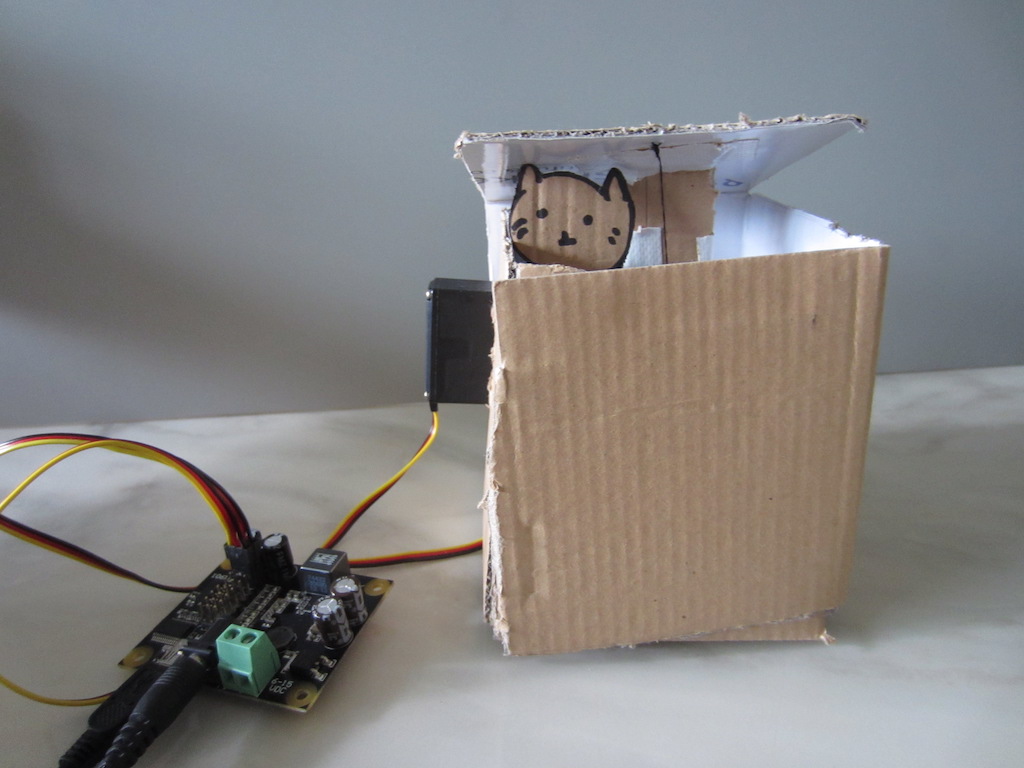
Prototyping
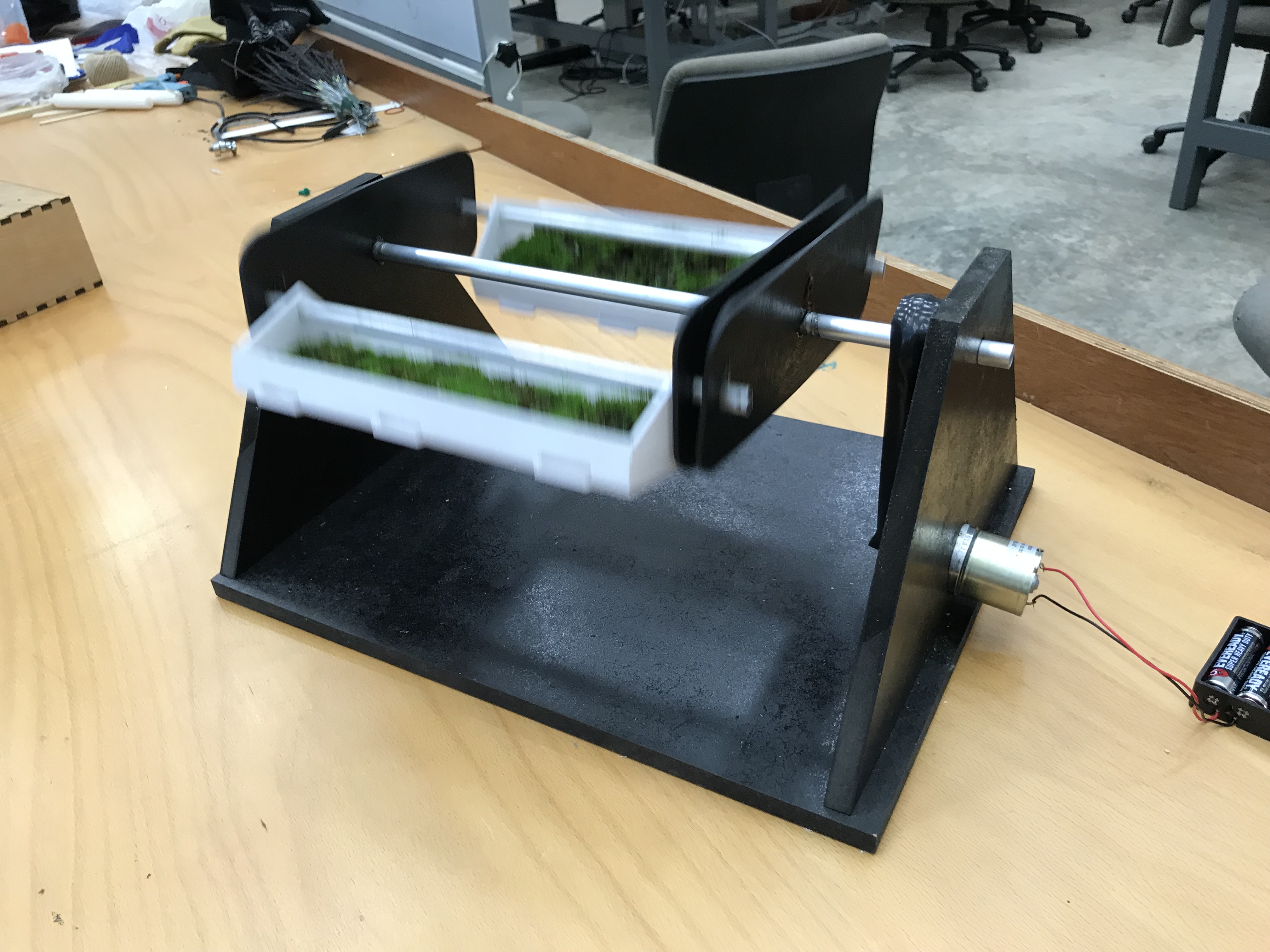
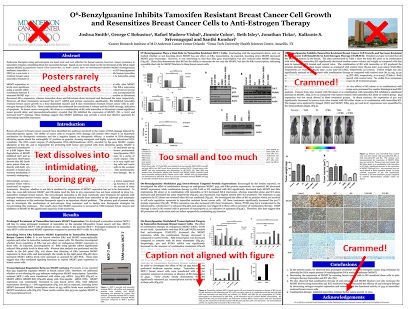
I was pretty worried about the structure and how it would actually hold together, and after having gone through the laser cutting workshop, was actually able to try it out! Here’s my process making in pictures:








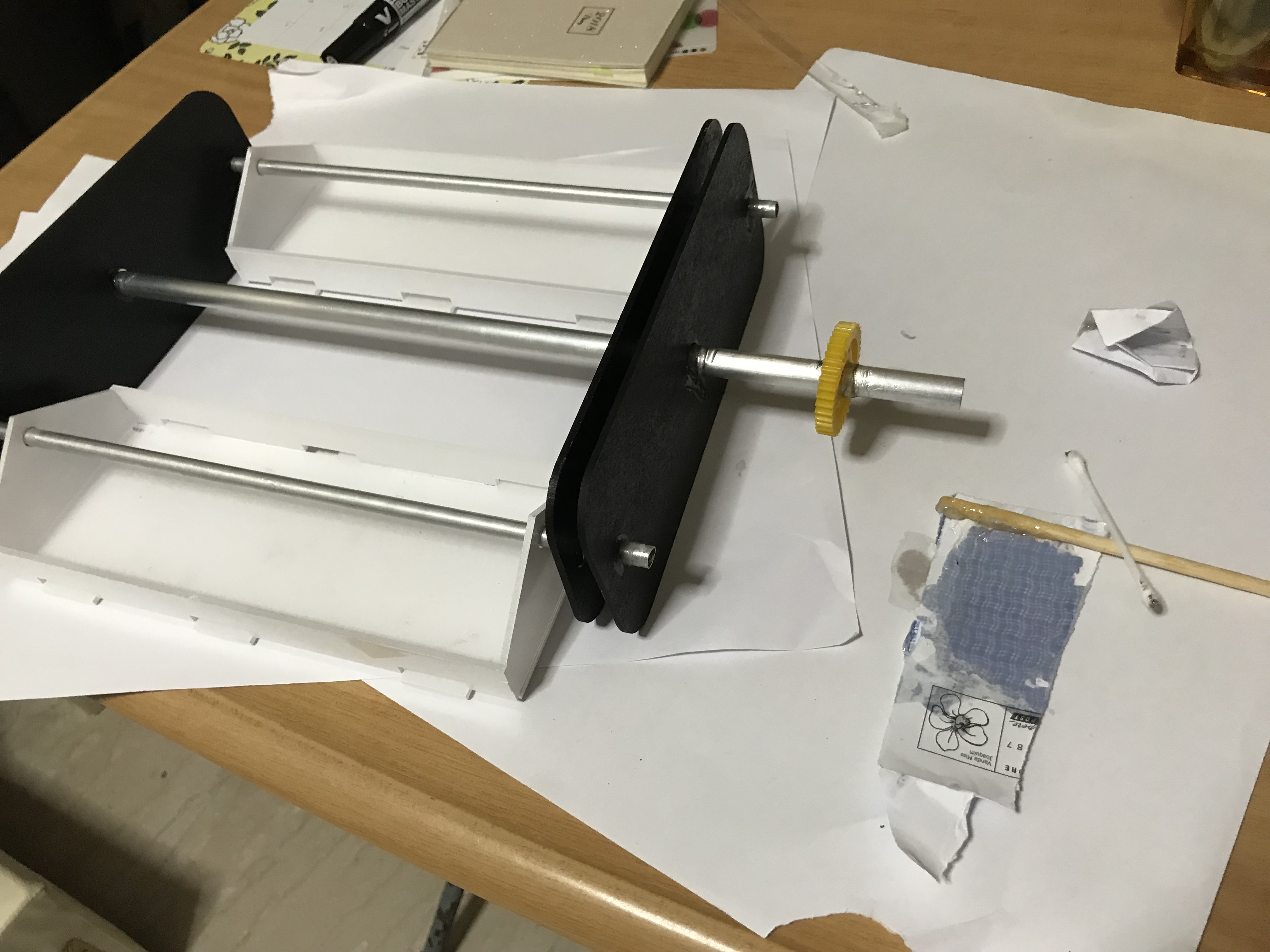










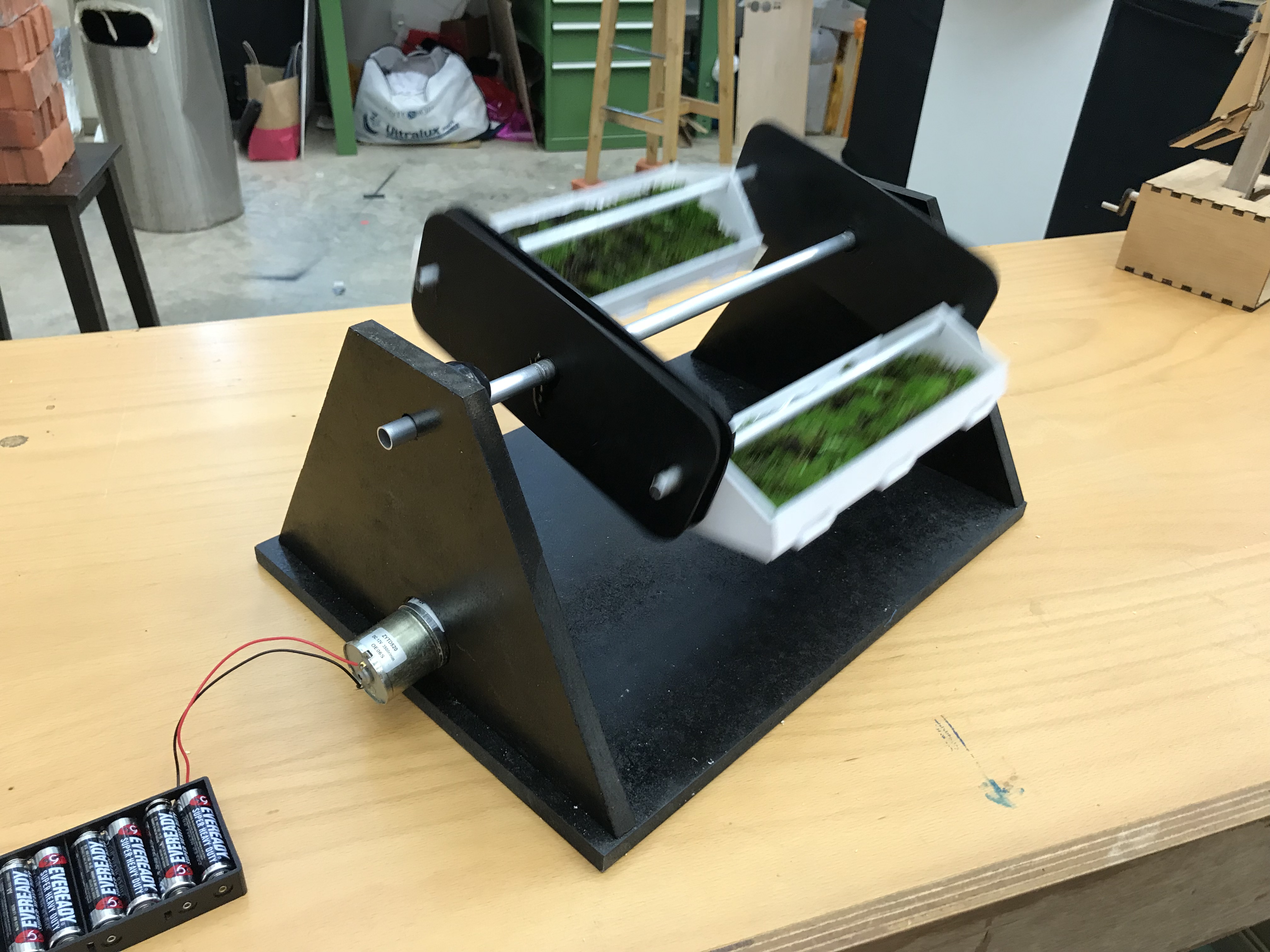

ps. moss burger is not actually the name of the machine, it’s just some pun injected (from the fast food chain Mos burger) into this otherwise nameless machine!
I envision this to be my final prototype (if possible)! From now thereafter, I would be working on the final machine. It would take some time though, perhaps 2-4 weeks to complete it as I wish to perfect it.
As of now, the speed of the turning it wayy too fast for my liking. I’d be experimenting with gears of different sizes and try to slow the speed down. In addition, I plan to make rotating grow lights (to keep the moss alive) to follow the movement of the rotation. However, it might take some time – my grow lights are currently still being mailed over to me, and is estimated to only reach me 1-2 weeks from now.
For the final machine, I would also make it slightly larger than this prototype. Not too large, as originally thought (initially I wanted it to stand at 1.6m height/5.24 feet) as I am not confident of my construction skills.
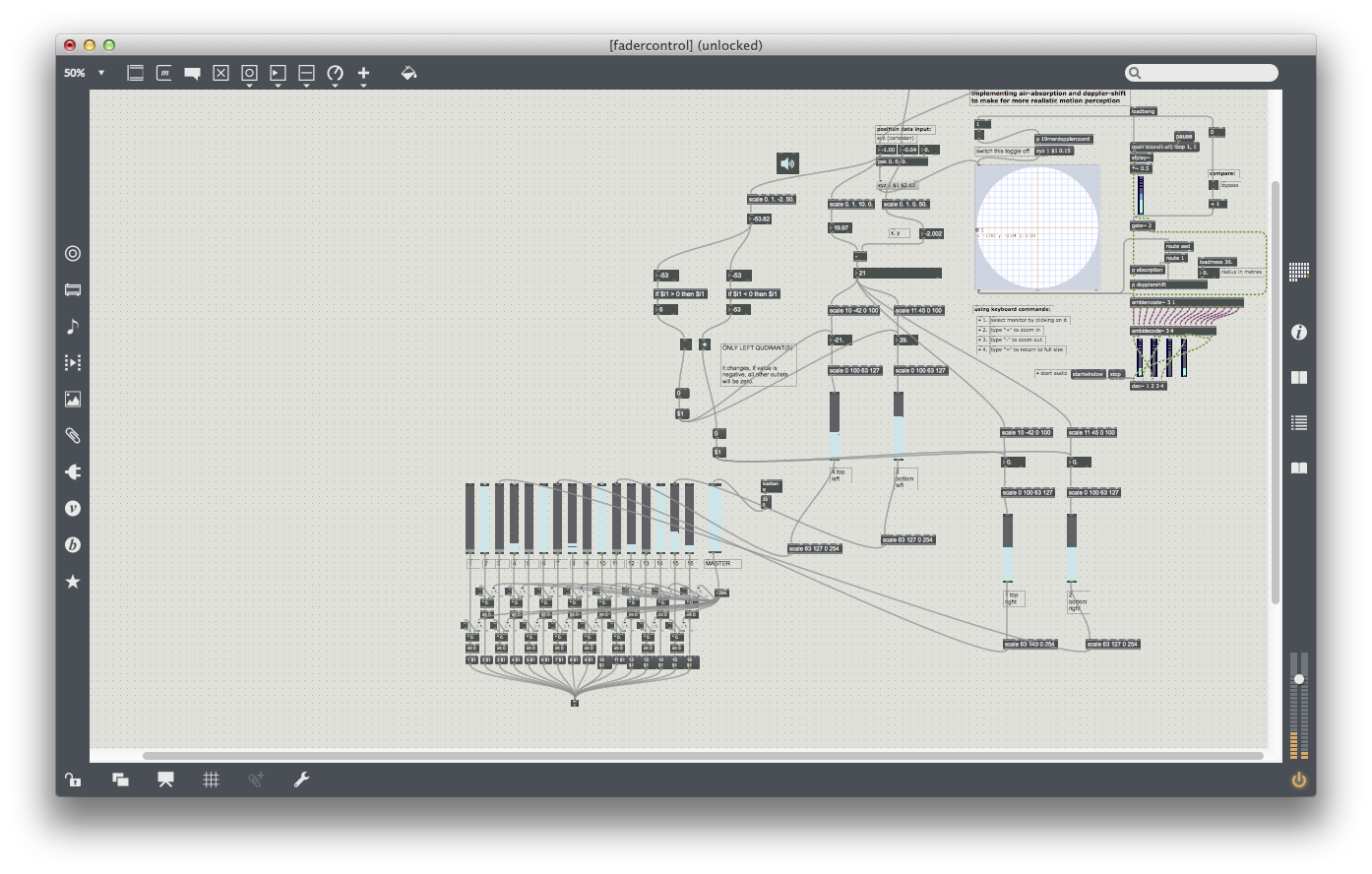
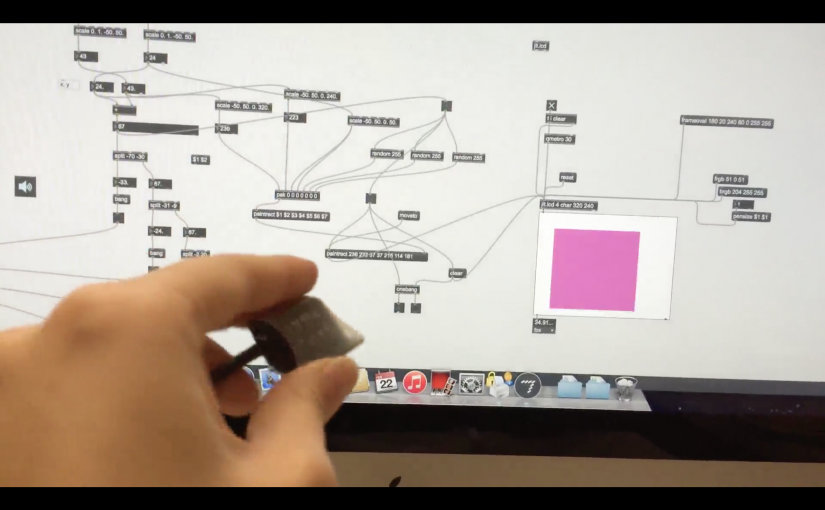
Projection Matters
I have not started on this yet, but I plan to project real life camera detection of the moss machine itself.
Supporting Materials (eg. pamplets, posters)





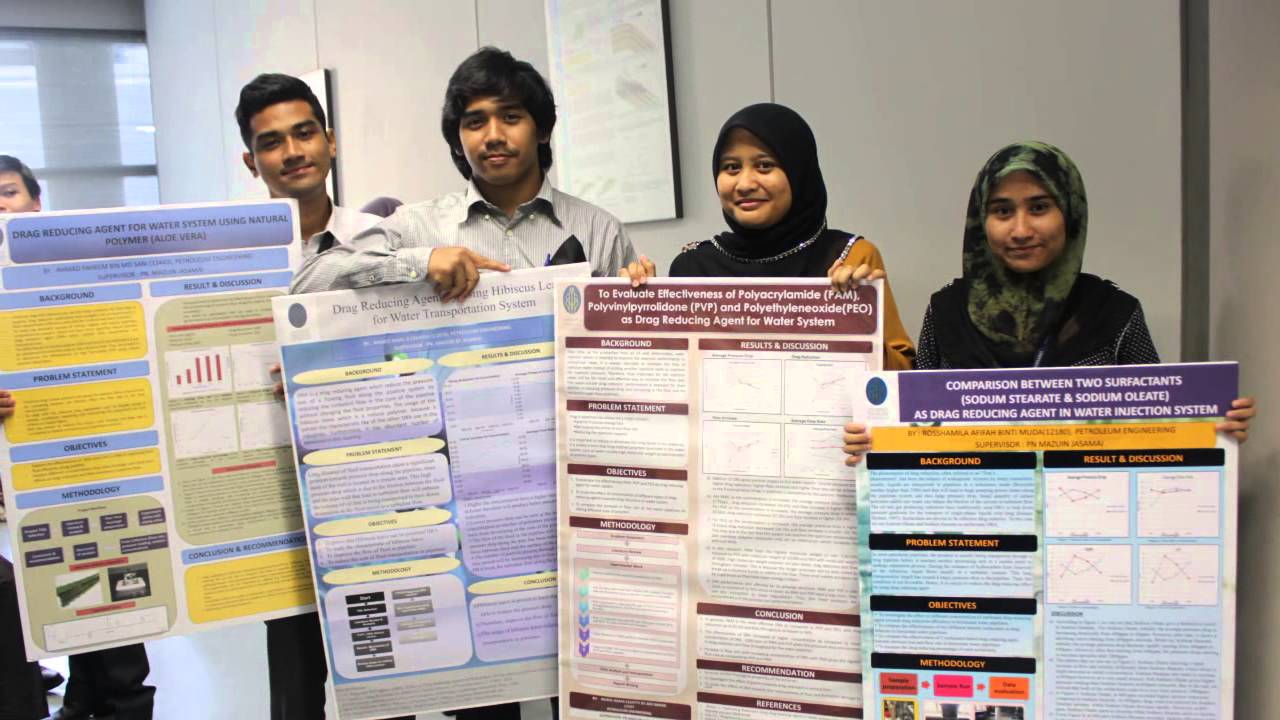
I wanted my final installation look to be a unique mishmash between the science laboratory, and a dark installation space. Above shown are mood-board references of how the final installation might look like – albeit with a slightly different colour scheme of purple, black, white and potentially dark blue.

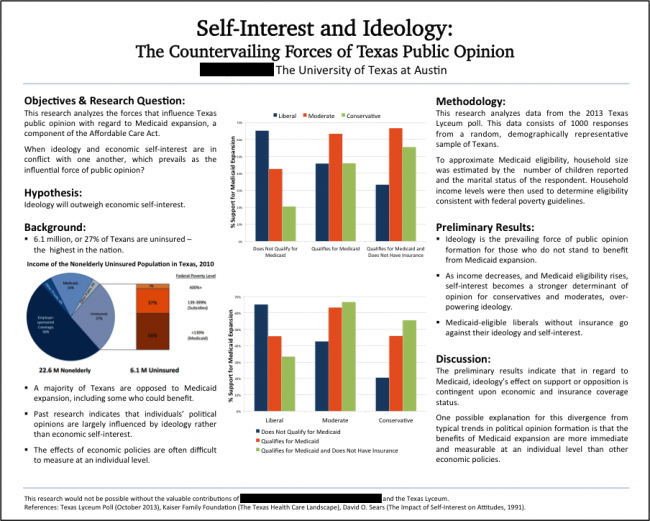
For instance, this was one of the posters I intend to display within the installation space itself. It would have real data which I collect from my investigations (eg. how many seedlings have sprouted from my moss), but placed in an authentic yet ludicrous way.
Conclusion
Over the next few weeks, I would be prioritising the creation of the machine and projections, as I am quite worried about how it would look like in the actual set up, and would require them to be ready as soon as possible so that I can more accurately plan the actual exhibit space.
I would also continue collecting data from my grown moss to be put into the poster ?






























![Analog Project [Documentation]: Cascade / Strings Installation](https://oss.adm.ntu.edu.sg/ttay004/wp-content/uploads/sites/542/2017/03/7-825x510.jpg)














































![“Music Instrument” [the Tun-tun]: Final Product / Assignment 2](https://oss.adm.ntu.edu.sg/ttay004/wp-content/uploads/sites/542/2016/02/thumb_IMG_1003_1024-825x510.jpg)




![“Music Instrument” [the Tun-tun]: Prototype / Assignment 2](https://oss.adm.ntu.edu.sg/ttay004/wp-content/uploads/sites/542/2016/02/20160201091103-825x510.jpg)




{kind=link}