I discovered a useful device to power multiple servos at same time easily. It came from this tutorial.
This was a far better option as compared to using simple Arduino- breadboard jumper wires-battery method to power servo. This was because I see my project using multiple if not, more than 10 servos at once, given installation including some interactivity and movement. However, I will keep my options open in using the types of materials to use.
The 16 Channel Servo Shield was a better alternative to powering multiple servos. It is a device with built in 3 pin male jumpers for servo wires to be slot in. As described, it can power 16 servos at once, within one device so this makes things efficient in technical part of the project.
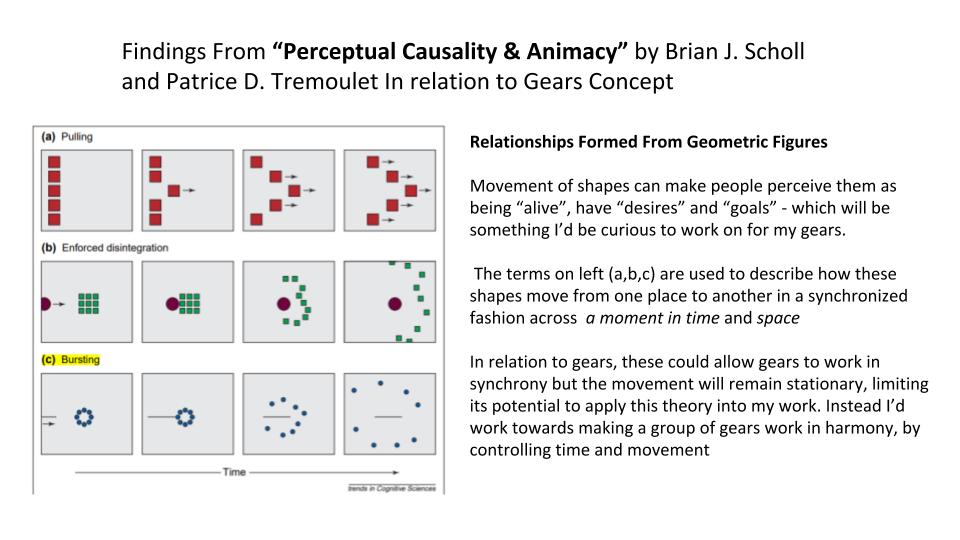
Aside from the technical side, I did not made any application of theories of ” – which included but will likely do them soon. Here is the reference from the book recommended to me. Guesstimating to do
a)Pulling, b) Enforced disintegration c) Bursting as seen below.
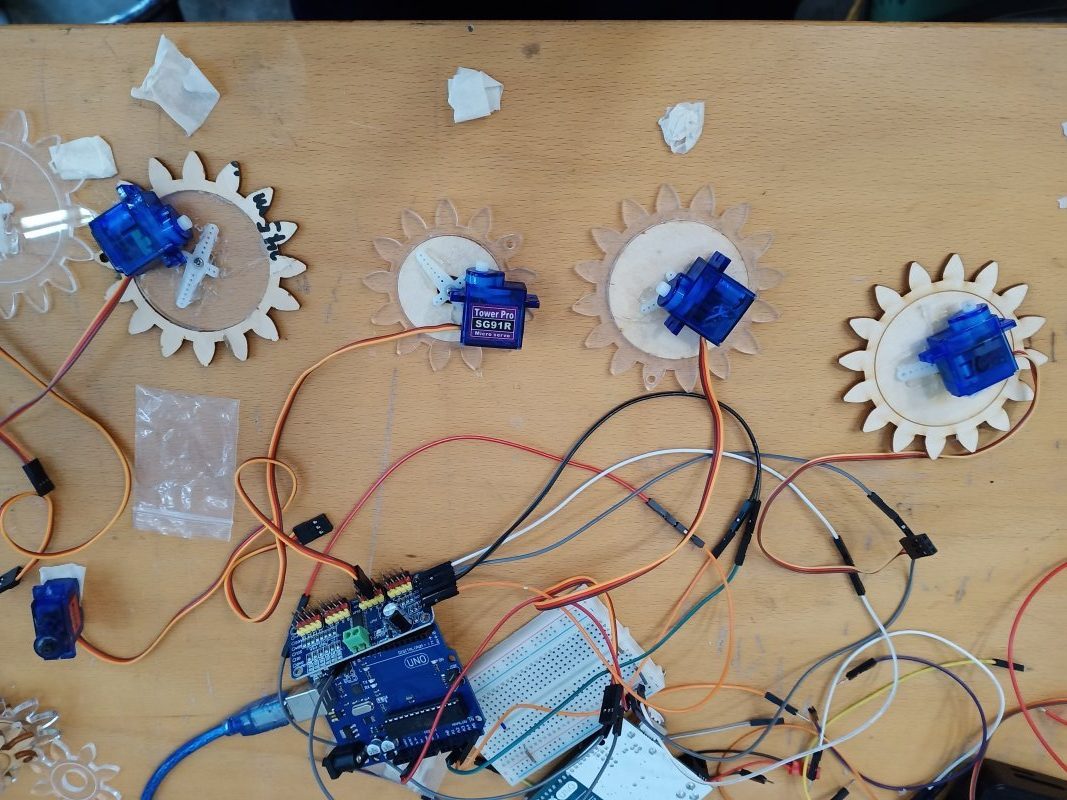
Arthur Ganson’s works are some works I’m supposed to refer to, but still working on experimenting different ways gears could ‘express’ themselves. I’m not so fond of working outside of simple mechanisms of gears. For the current board that you are seeing right now, you see some bent wires connected to a section of the gear tooth (lasercut).
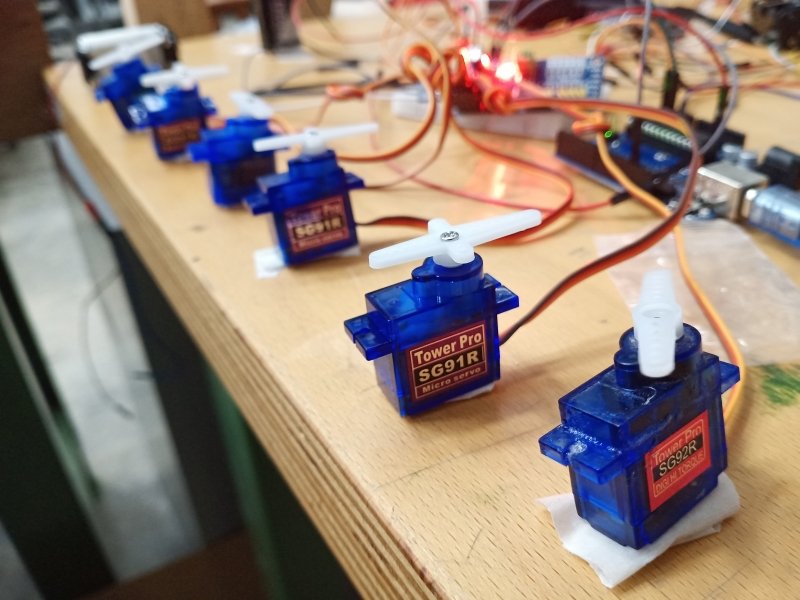
The small hole in the tooth for some gears was there to observe how many rounds it makes when it connected with servo. Instead, I just attached some wire found and tried to make some “connections” – between one entity and the other. This part is seen in the last clip (below). These are just shots of how I build the servos, prepared the boards and planting of gears, and saw how servos coded differently ( in terms of delay) for each video, they move differently too.
Currently, there were some technical challenges in powering these servos to play at the same time with gears attached, and I am still working on this before proceeding to play around with movements of gears, with reference to the Scholl’s experiments. The movement of gears was meant to be explored in the coming weeks, so I’m hoping to with lesser assignment piling up, there will be more time for this.
In conclusion, I’m way behind schedule in terms of experimentation! But, I’m quite hopeful I can at least find the time to further refine my process of working around with gears in the coming days.