


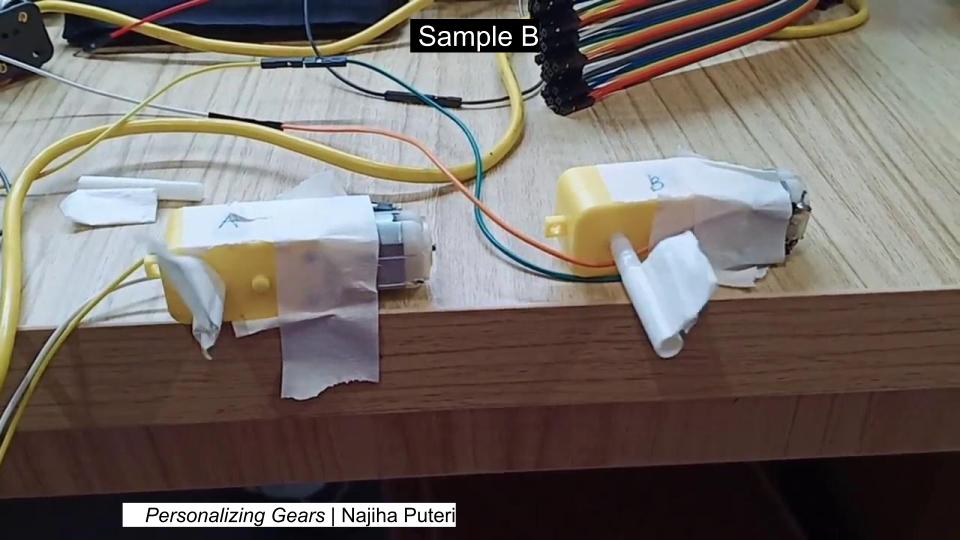



Sample A:
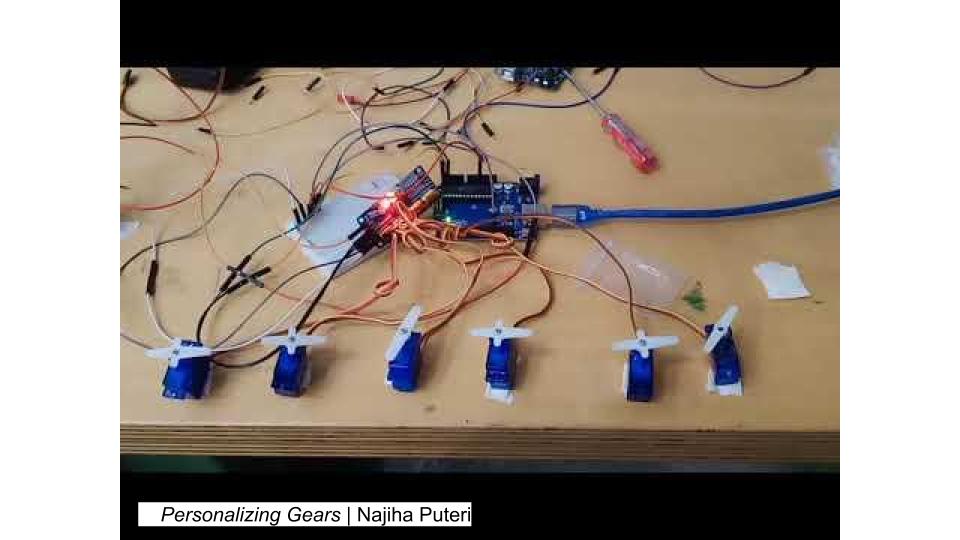
Sample B:
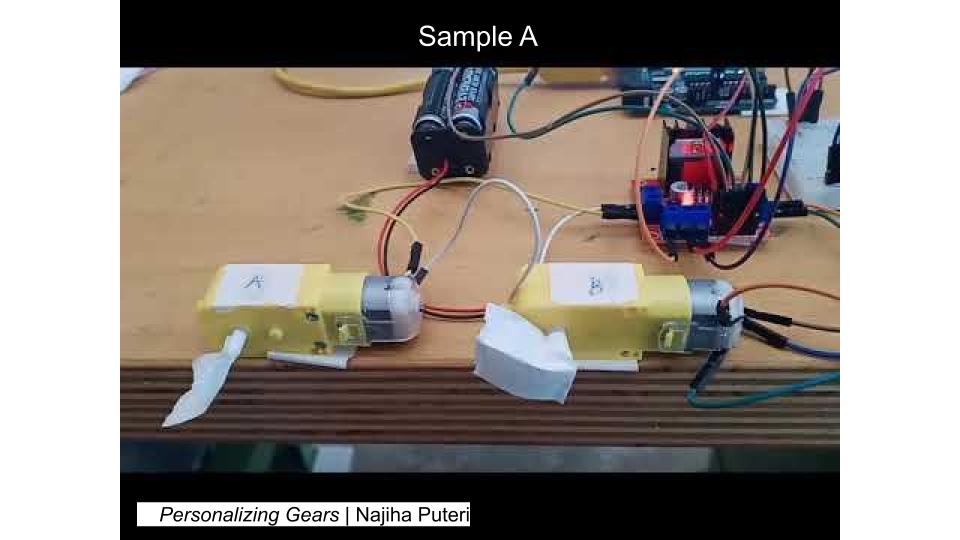
Demonstration
https://www.youtube.com/watch?v=8_eHc2QTZ9Y&feature=youtu.be
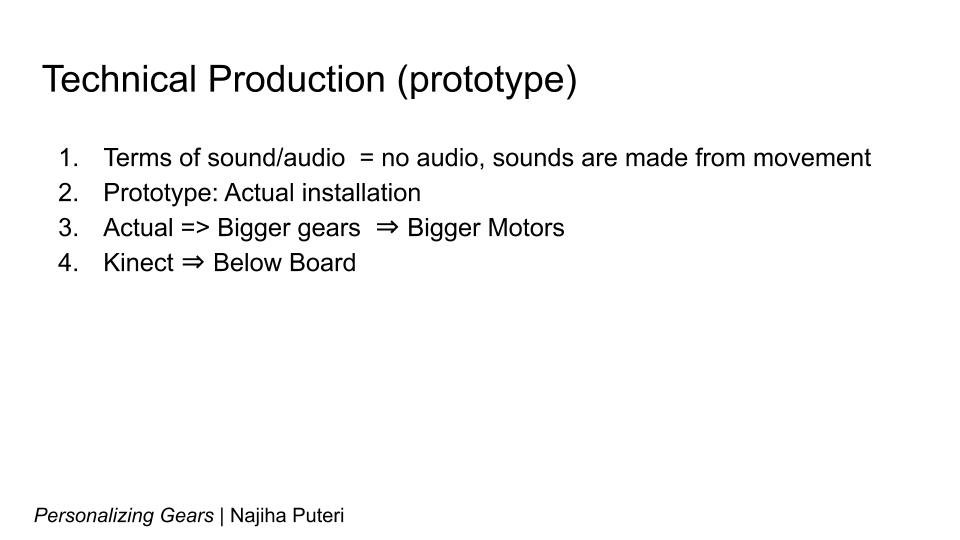
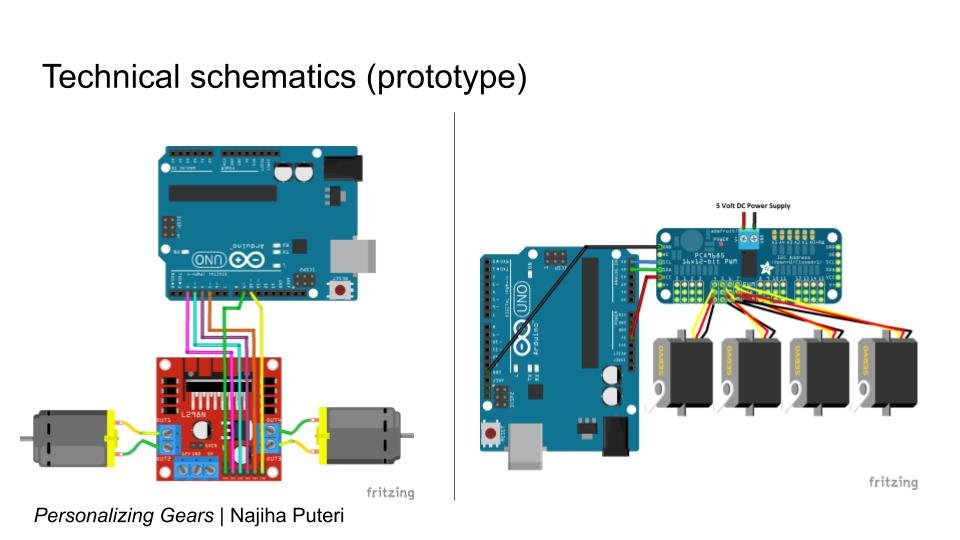
Building up on previous consultation, I had to make some changes. I switched circuit boards from using 16 Channel Servo Shield and Servo Motors, to L298N and DC Gear Motors. This was because there use of gear motors was more flexible in its movement and speed, where it can move beyond 180degress clockwise and anti-clockwise. The flexibility and range of values I play around would keep my input of data more varied and accurate to what type of movement I want to make as much as possible.
Using L298n helps to control two motors in their movement and direction.The circuit diagram below depicts a full sketch (with inaccuracy in the L293D)


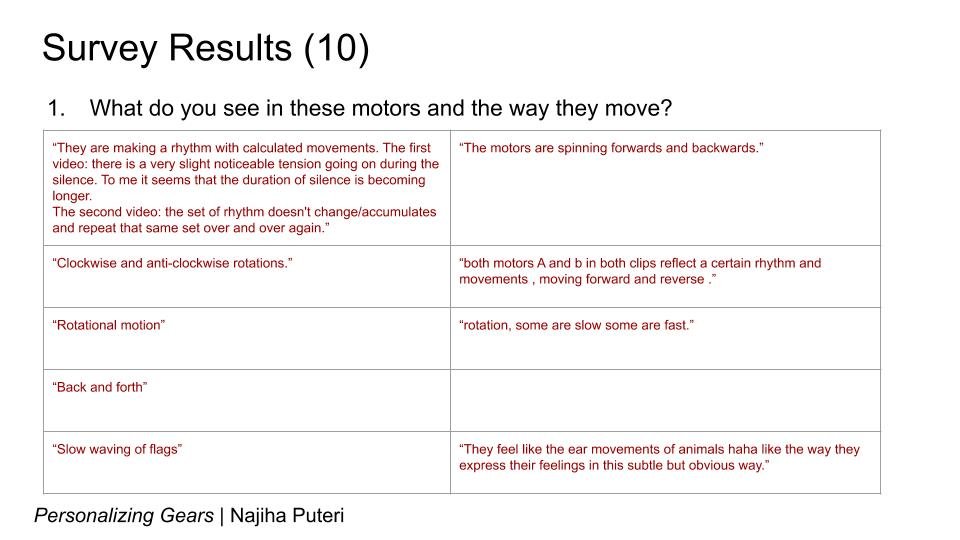
I haven’t really explored much with the way motors move, but I made this sample of movements and played around with the delays and pauses. I created layers of code where there is a build of pauses after each set of movements. The pauses gets longer and longer at the end of the set. Each set creates a type of rhythm that appears predictable. But the pauses at end are delayed after each round, creating some sense of anticipation.
I think I have a lot more to explore in terms of their movements as of now.