The speed of our advancing technology and the technology that is getting obsolete are on the same pace, 15 years ago, we were using Floppy Disks, 10 years ago, we were still using Compact Discs and the millennials now does not know what a Floppy Disk is. We still see CDs now but they are getting obsolete really soon as there are lesser devices playing them now.
Choosing of the Best Appliances.
For this project, I want to give new life to daily objects which are on the path of becoming obsolete by making them a musical instrument, there are many common appliances that are in this category and should be ancient in a few years time –
VCR
CRT TV( Cathode Ray Tube or also known as the old Fat TV)”
Remote Controllers
CD and all devices which plays them
MP3 Player
Old Gaming Console
Top Loading Washing Machine
Landline Telephone
Fax Machine
Public Payphones
Answering Machine
Slide Projector
Dial-up Modem
Basic Alarm System
GPS Units
Bold are appliances which are totally possible for this project since I want to make musical instrument and they naturally produces sound in their normal usage context.
Green are appliances which are Bold and their normal usage context have the interactions when the user use them, which make them exactly what I could use for INTERACTIVE DEVICES.

Since the signification of a Gaming Console is different for every individual, people plays different consoles and different game or not at all, it is difficult for me to create something that all the end user(during the End Of Year Show) will resonate with.

The best of all will be the Landline Telephone as I am sure that most of the end user will have some interaction with it some point in their life and the basic function of a Landline Telephone is to receive a call or to make a call, this resulted in almost the same user interaction throughout the globe – making a call or when the Phone Ring = Pick up.
And the Instrument that I have in mind…
After my researches on musical instruments,
I’ve decided to use the musical box concept where the user could play music by inserting a sheet of musical notes and it will play music digitally.
This could be done by using a set of lasers and photo resistors to read the musical notes on a clear piece of plastic scrolling through the system.
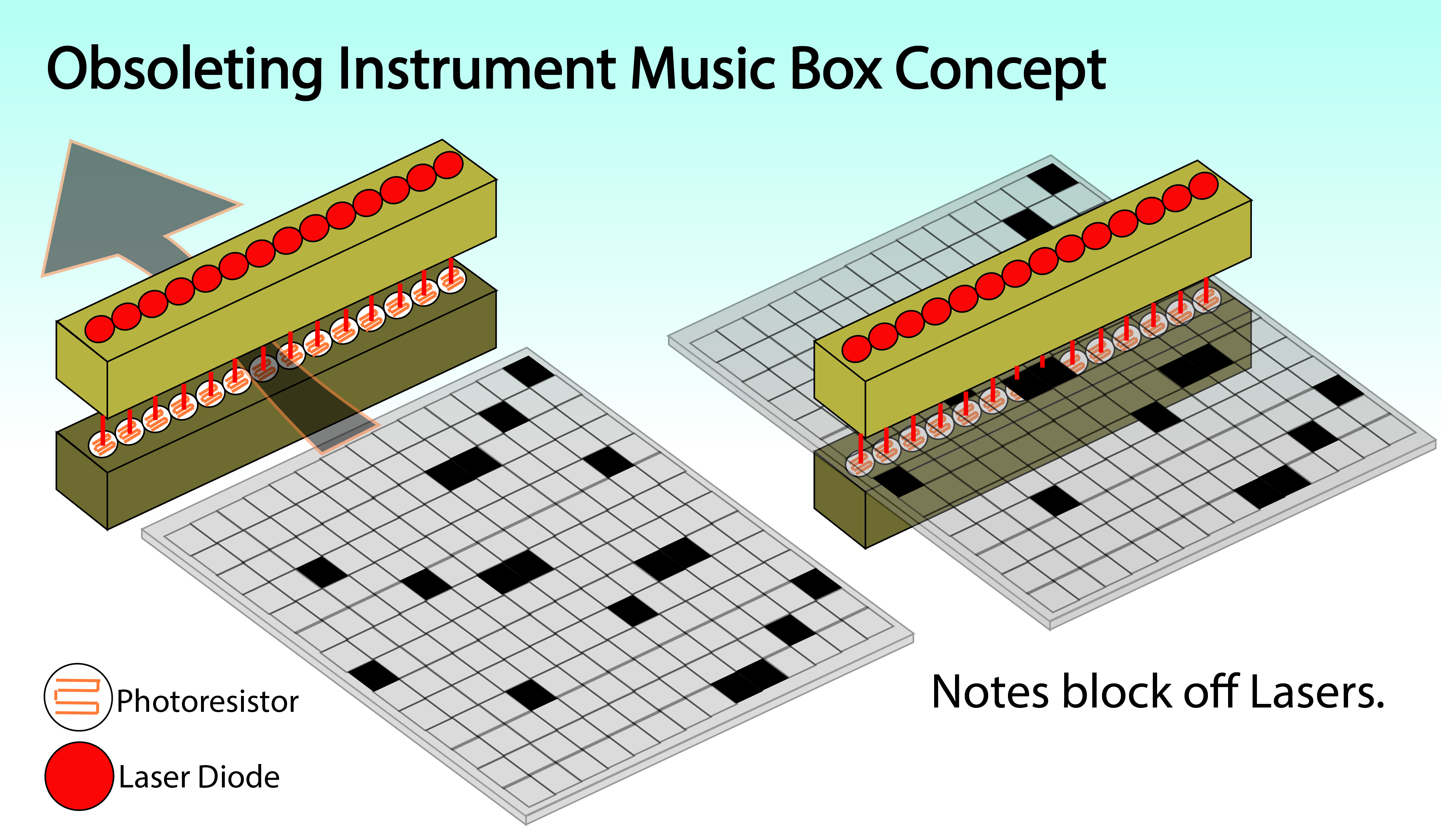
There are 14 sets of Laser and Diodes due to the research I had done on music theory(not posted yet as it is still an ongoing research) whereas there are 8 notes in an octave but only 7 different notes in an octave C D E F G A B C, so by placing 2 octave next to each other, there will be 14 white keys C D E F G A B C D E F G A B as I chose to omit the last C so that it looks visually completed from the looks of piano keys.

And what about the black keys? since I don’t want to add in 10 keys for the major and minor (black), I could use a combination of the adjacent white key to produce the sound of a major and minor. For example if I want the C♯(D♭) key, I could have CD shaded at the same time to produce a C♯(D♭) sound.
Flow of usage
- The phone will look like a normal phone with an exception of a slot to insert the musical sheet into the system in the body of the phone.
- Nothing can be done when the phone does not ring or the user does not make a call.

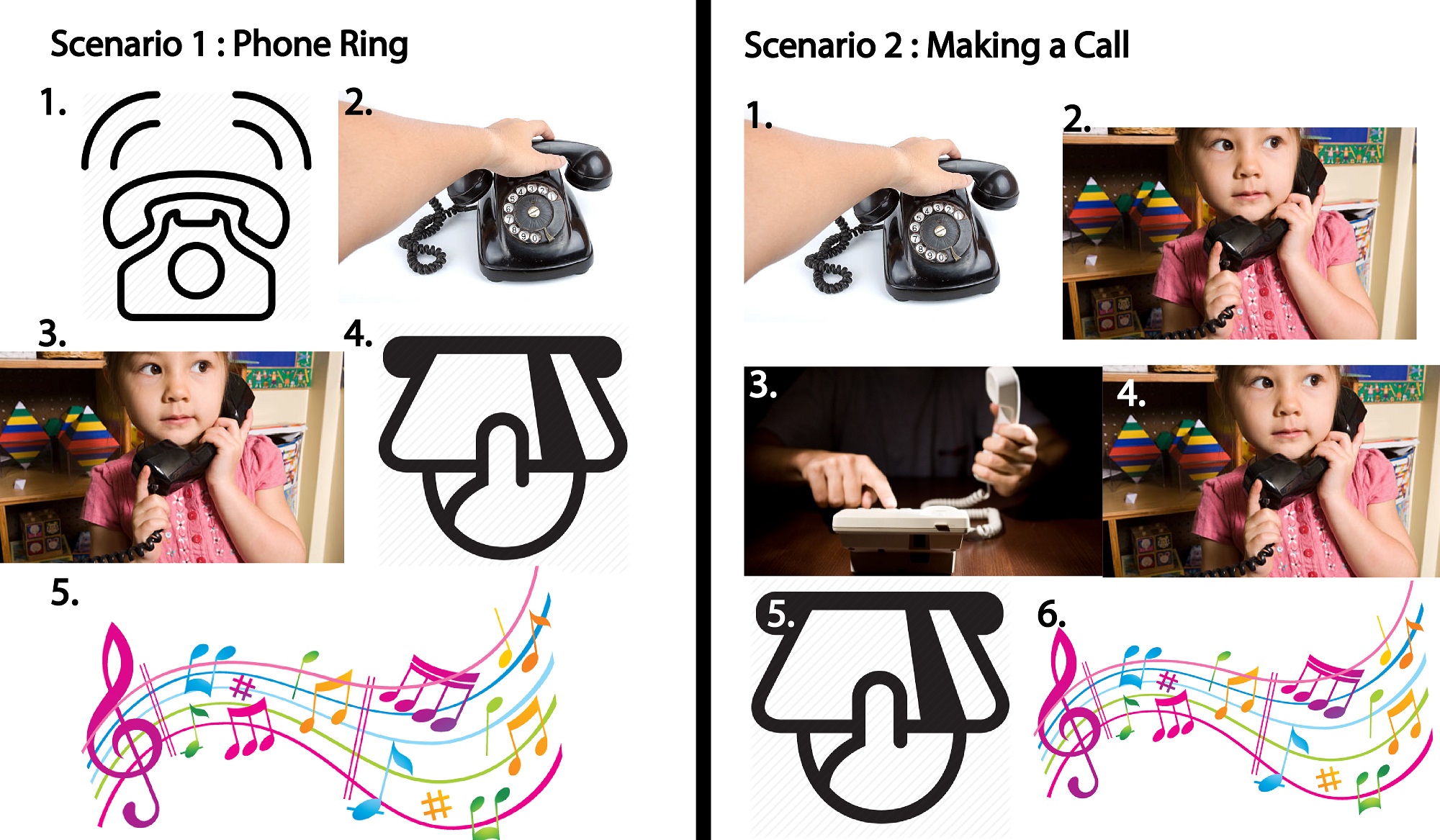
- Scenario 1 – Phone Ring -> User pick up phone -> voice command user to insert the music sheet -> User insert music sheet -> the phone pull the music sheet -> User listen to the music.
- Scenario 2 – Phone does not ring -> User Pick up the phone -> User hear the *toot toot toot* tone of the land line phone -> User dial some number on the number pad -> User hear the tone of an outgoing call -> Voice command user to insert music sheet -> user insert music sheet -> phone pull the music sheet -> User listen to music.

 Notice how it move 1 foot at a time when turning and how it walks.
Notice how it move 1 foot at a time when turning and how it walks.



 This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
 The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot,
The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot, 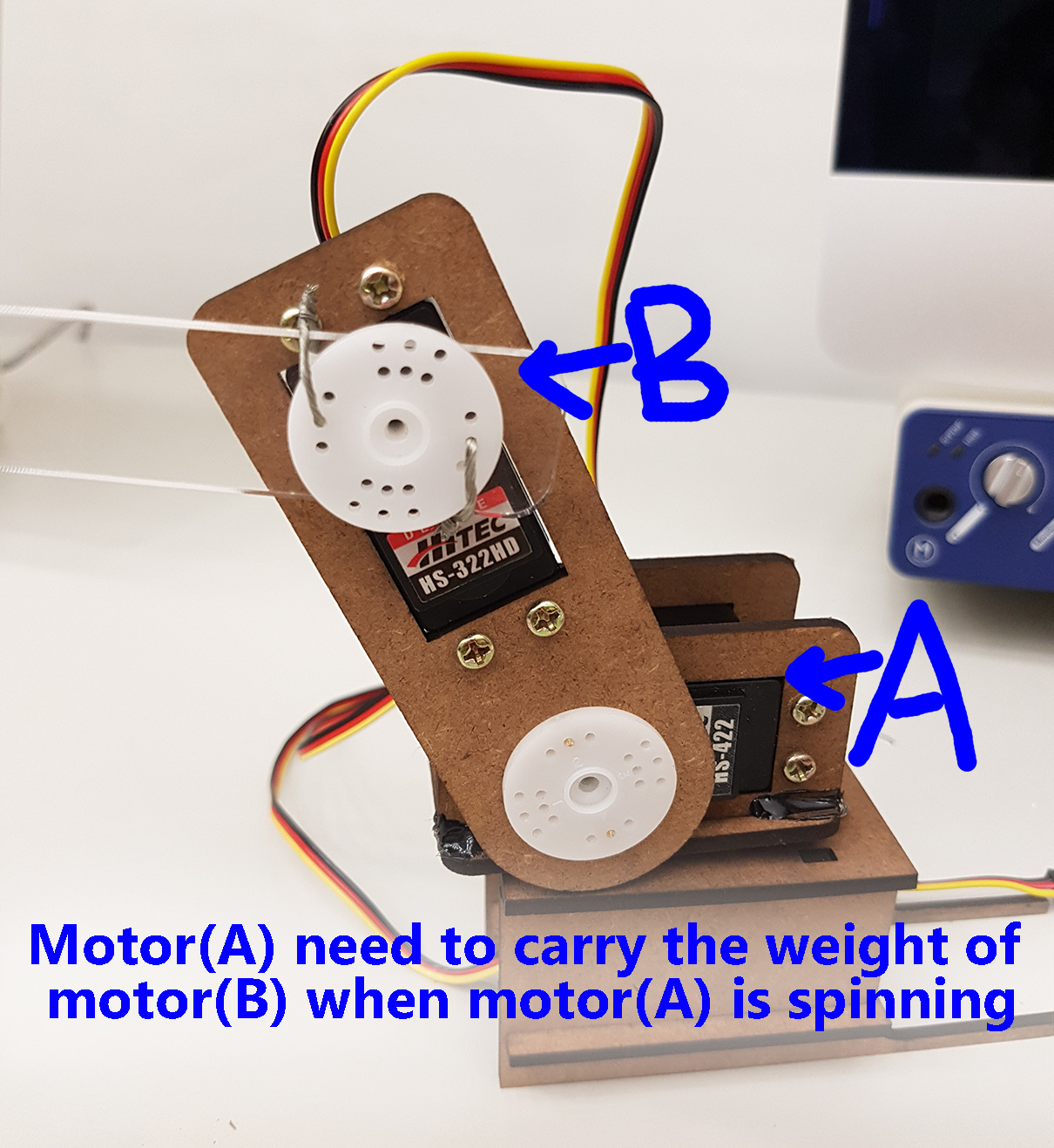 This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)
This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)