










Improvements Just In Time.
To understand what to plan for, I would need to understand the nature of the project. As the task for completing a physical + mechanical project differed far from a virtual-screen-based project like games and visuals. There will be more restrictions in doing a physical project than virtual one due to the nature law of physic, material and cost.
As for building a few robots will cost me quite some money, budgeting will be even more important than time planning, as for where the monies come from, I will probably save up from selling things online and work studies and treat it like a commitment because I think that no one is forcing me to do anything and its all my resolution to fund my own project.
 I had thought about asking for sponsorship and that may even happen if I have to. (especially for the batteries that I will be using in the robots, these little things must be of great quality due to safety issues while a good + durable + high capacity + low weight battery cost about $500 and up each and I would need at least 3(excluding spares), which I am totally unable to afford.)
I had thought about asking for sponsorship and that may even happen if I have to. (especially for the batteries that I will be using in the robots, these little things must be of great quality due to safety issues while a good + durable + high capacity + low weight battery cost about $500 and up each and I would need at least 3(excluding spares), which I am totally unable to afford.)
During this few weeks, I had been learning Blender (3D modeling Software) from scratch, it is really difficult to pick up, but i think the potential of Blender is far beyond what I need, so I will stick to learning this super useful program.
I’ve tried to follow a few tutorial and learn the basic of Blender from youtube, this was my first blender experience in building a 3D model.
 the overall shape of this is rather similar to the chest so it took a while to get used to this, however after building this, I realized that I don’t know how to make the top of the robot. So I progressed into another tutorial.
the overall shape of this is rather similar to the chest so it took a while to get used to this, however after building this, I realized that I don’t know how to make the top of the robot. So I progressed into another tutorial.

and this was the over shape that I made and I am pleased with it for a first timer effort, although it took me 2 days to reach here, after this, I continued to build the details at the side and front…
and I decided to make it like a production poster so I rendered another isometric view to make it to looks legit for my presentation.

In blender, there is a animation function and I thought it would be really cool if I can learn it, so I went ahead to learn it from an online tutorial and produced this.

After I feel that this is good enough for the presentation, I tried to 3D print the model out, it was then then I realized that my model was full of mistakes and it only look good, in actual fact, the surface of the robot was really badly made. So the effort I made in this 3D model got to the furthest here, I will definitely be modeling everything again for the actual robots that I will be building for this FYP as this model doesn’t work, however this was a good learning experience for me and understand that I need to build the model’s surface properly.

and then it was attached to a small remote control car for proof of concept to be used during the presentation.

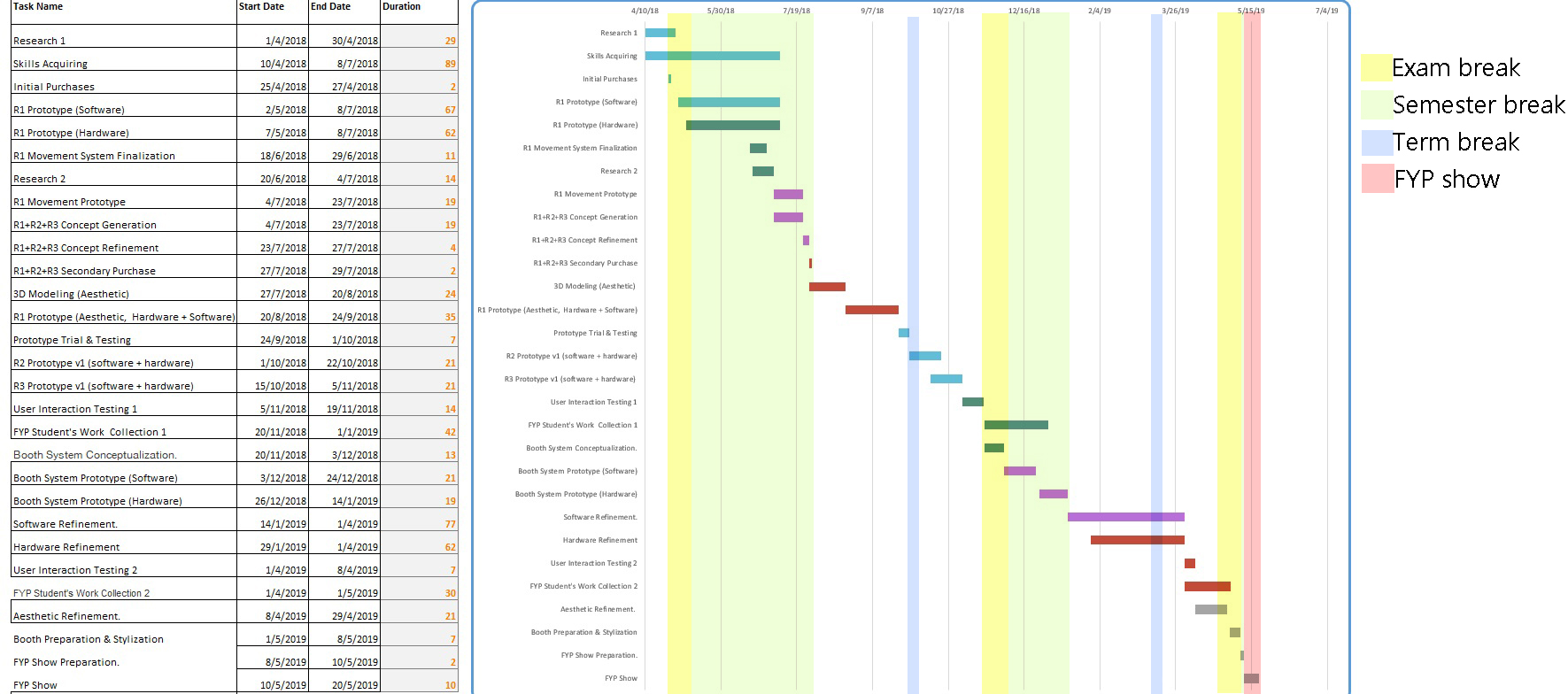
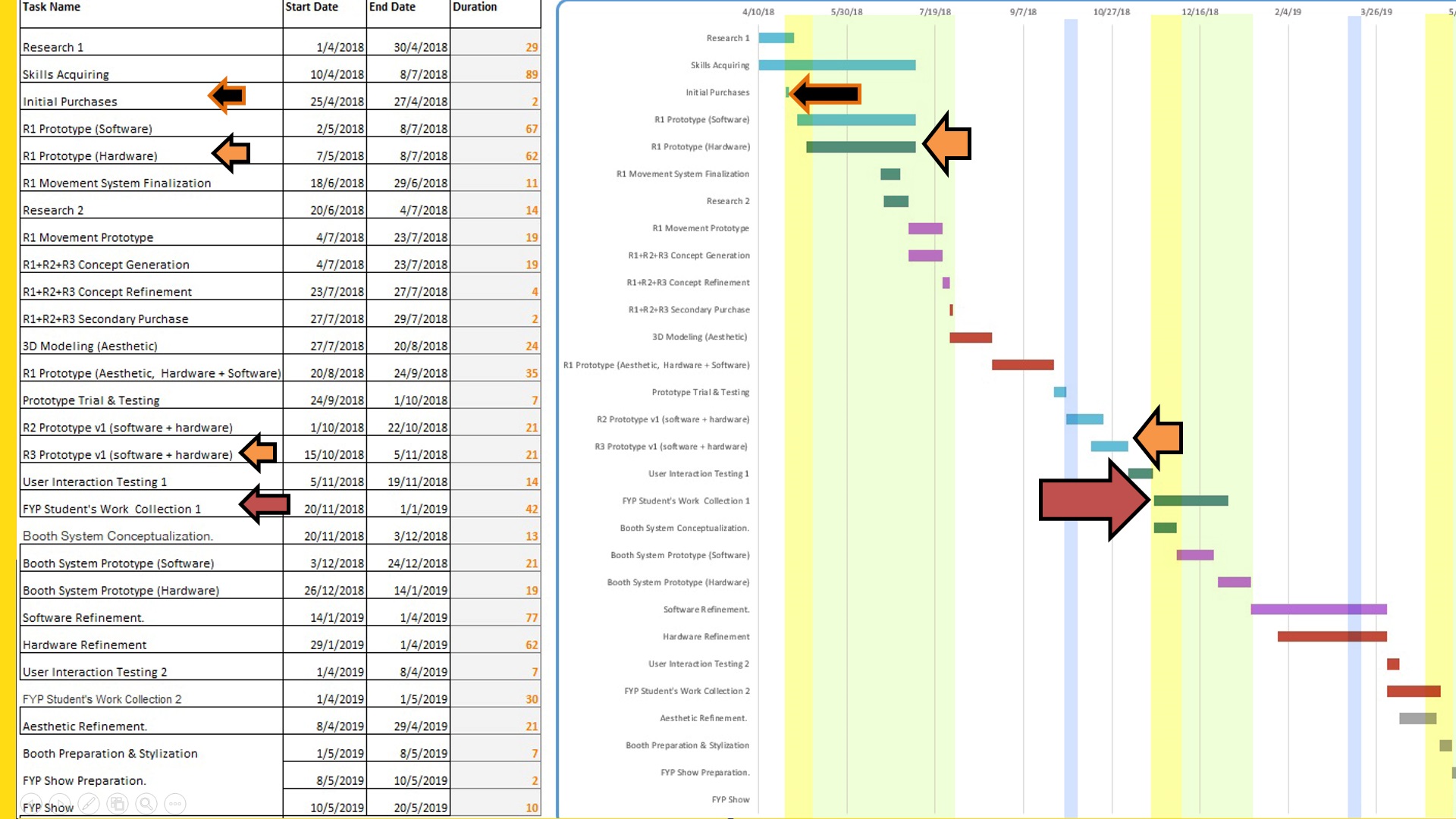
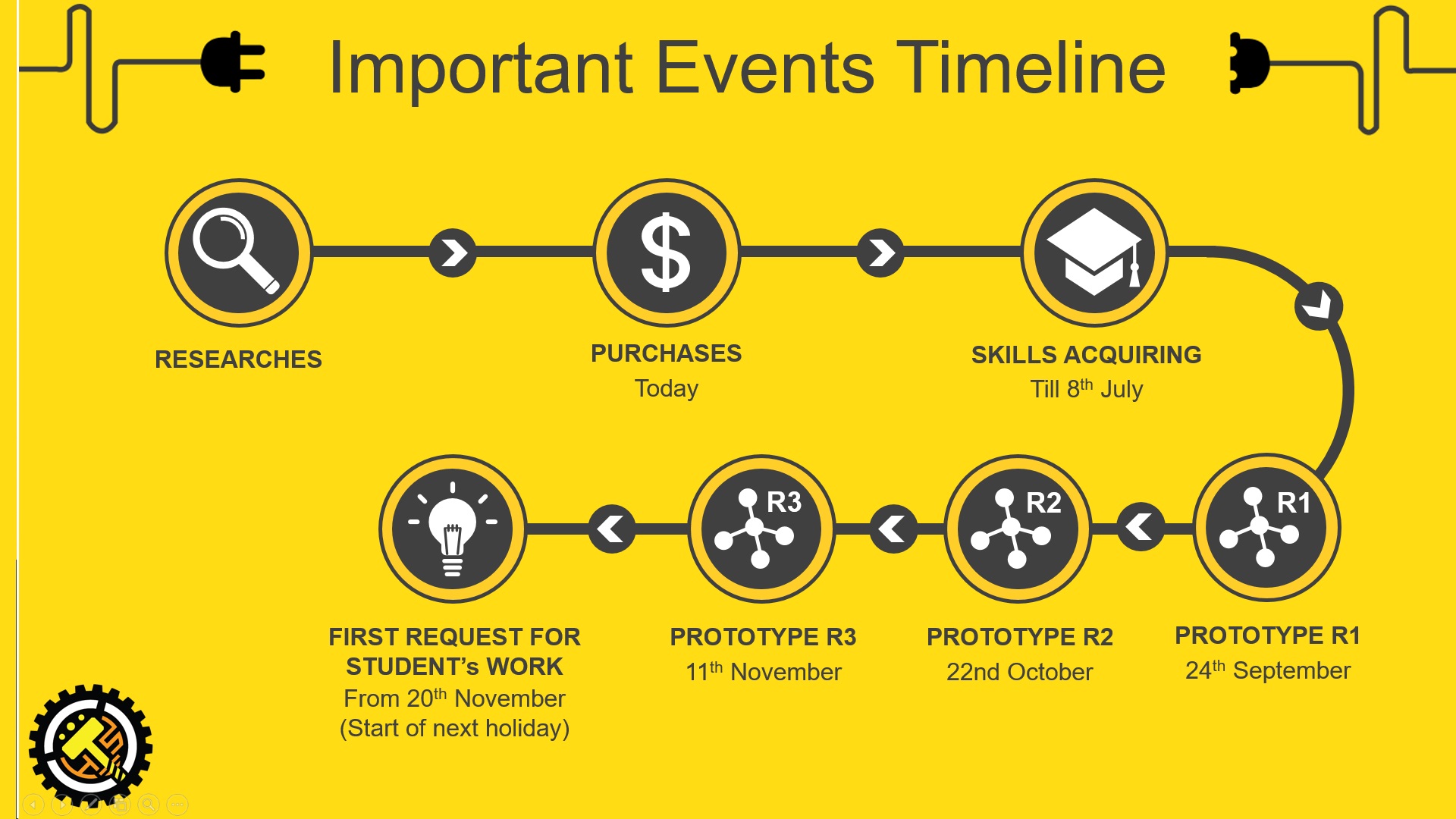
I started the Gantt chart at 1st of April 2018 as it was all research done till this point.
Within each task, there will be multiple small task which falls into the same category and I will explain them as well as a short description of what it is about here in this post.
Since my project will be physical+mechanical+ technological+ I need to get student’s FYP work early, it is really important to start the execution really early and throughout the holiday because building of the actual robot and troubleshooting the system will take quite some time, and I have to ask all FYP student to submit their work to me really early to make everything work.
Research 1 (1st -30th of April):
I think this is the most important factor of the project, good research done here will help me to reduce work greatly in the future.
Researches up till this point (16th April) – Similar Existing Products, potential parts, platforms for interaction, things I have to learn, Inspiration of artistic works, Parts price comparison, Target market and segmentation,
Skills Acquiring ( 10th April – 8th July):
There are many lacking knowledge and skills required for me to complete this project, like the list of things to learn, I need to learn a few of them to make sure that my system could work. Also, I need to pick-up 3D modelling skills as the knowledge I have now is insufficient, In the past few days, I’ve started to learn Blender, which is a free software for 3D modelling and is great for my project, still, time is needed to hone the skills hence the long period of time allocated to learn these skills.
Initial Purchases (25th April – 27 April):
One of the biggest way to save money is to purchase them from china, which will take weeks for the item to arrive, hence it is really important to buy research about the parts required and buy them early to use the least money for the best result. Also, initial purchases is set to 25th because I will be presenting on that day, if no major changes were made, I could only really consider what to buy after that.
R1 Prototype (Software and Hardware) (2nd May- 8th July):
This will go hand in hand with skills acquiring, as I need to have a goal of what exactly to learn, it is the best to do while learning and learn while doing. R1 is the first Robot that I will be building of the set of 3, which will be the bare-bone of the Robot basic functionality and act as a confirmation to the general systems and parts requires to build R2 and R3.
R1 Movement System Finalization (18th June – 29 June):
As movement is really difficult task to achieve while concerning about the safety of the people and booth, (It is really easy to make something move, but it is much harder to make it move while not destroying things.)
so I gave more time for me to think about how I will achieve this.
Research 2 ( 20th June – 4th July):
When I think of robots, I will think of Japan, maybe its just me since I was influenced by the robotic culture of Japan when I was young, so I will travel to Japan during this period to experience their advancement of robotics first hand. (Place which I will visit :National Museum of Emerging Science and Innovation (Miraikan), Unicorn Gundam in Odaiba, bot at Haneda Airport, Henn-na Hotel, Robot Restaurant (not sure about this).
R1 Movement Prototype (4th July-23rd July):
Start to prototype right after I am back from Japan from experiencing their robots and hopefully get to see how they works in Japan.
R1+R2+R3 Concept Generation and Refinement( 4th July -27th July):
Since by this point I’ve already understand what parts R1 requires and already have the measurement of parts and sizes like motors and screen size, I could think about exactly how each Robots will look like as they will look different and have different functionality.
R1+R2+R3 Secondary Purchase (27th July – 29th July):
Knowing what parts each robot needs, I could finally purchase the basic parts for R2 and R3, plus the add-on function for all 3 robots(each robots have different functionality so require different parts)
3D modeling(Aesthetics) (27th July – 20th August):
This will be the final appearance for all 3 robots, 3D modelling done in blender.
R1 Prototype(Aesthetics+ Software + Hardware) (20th August – 24th Sep):
3D printing of all R1 modeled parts, fix them together and make sure the software and hardware works, if it doesn’t, edit and reprint of the parts.
R1 Prototype Trial and Testing ( 24th Sep – 1st October):
when all parts work together, test the robots and system in a location to make sure everything work as expected and fine tune.
R2 and R3 Prototype V1 (Software and Hardware) ( 1st October – 5th Nov):
Since the primary component and system of R2 and R3 is the same as the already working R1, these 2 robots will require lesser time and the main portion of this 2 robot will be in 3D printing and executing the different function in them.
User Interaction Trail and Testing ( 5th Nov – 19th Nov):
Testing and making sure that there are no major bugs in the system, touchscreen and functionality works well.
FYP Student’s Work Collection 1 (20th Nov – 1st Dec):
At this time, all 3 Robot can roughly work and I’ve already document these robots, so instead of just verbally telling them I will help them in making their FYP better, It will be more stimulating if I show them a system which already work and ask them to prepare a document for this system for their own benefit. (it will not be easy to ask people to do extra work, so I need to make sure that I sell my Idea to them really early*That’s 1 semester before the end of FYP* by making these robots cool and they will be losing out if their work is not in the systems.) Also, at this point they don’t have to send me any work and it is already the semester break so they have some time to think about what they want to prepare for the systems.
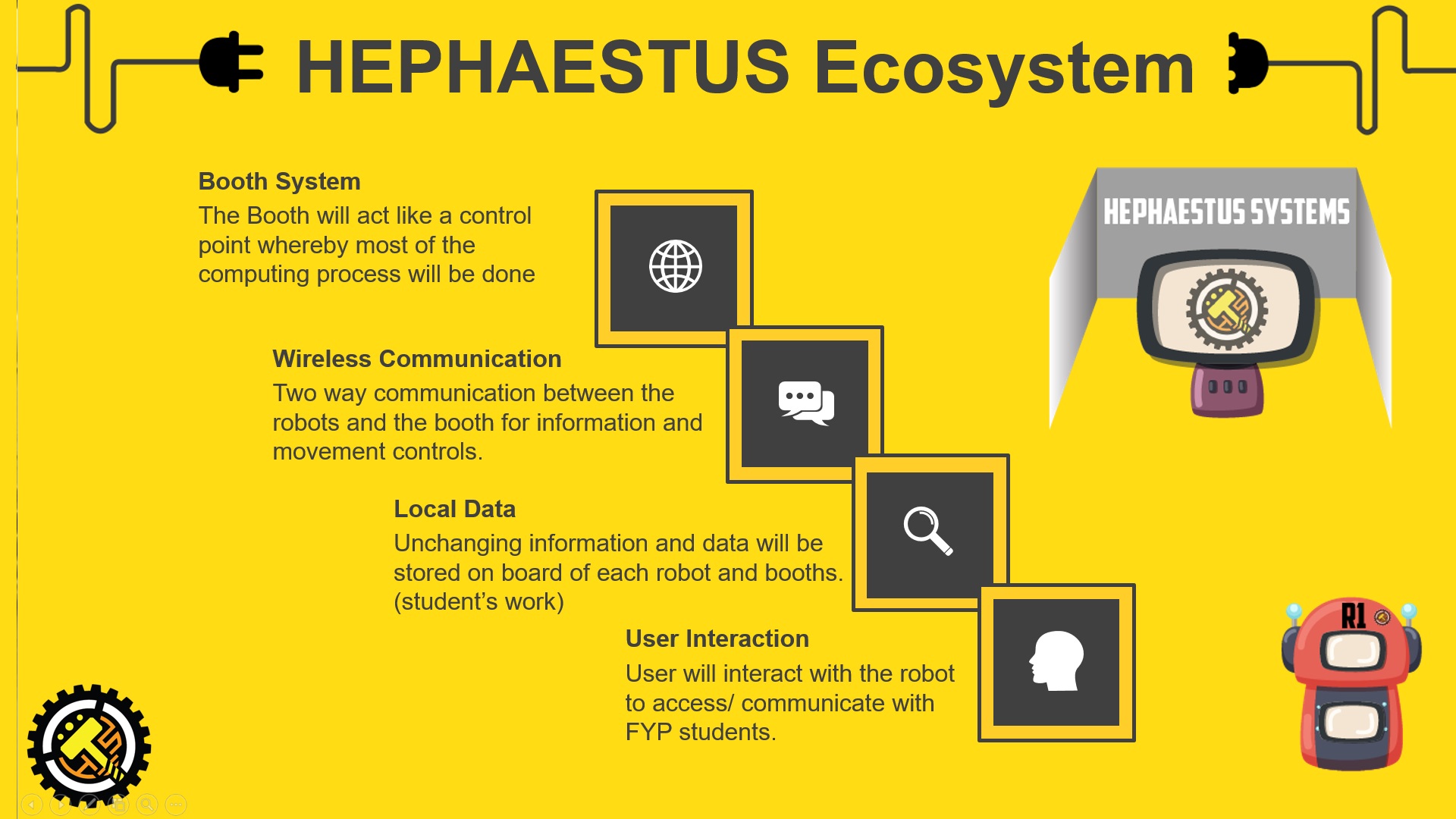
Booth System Conceptualization.( 20th Nov – 3rd Dec):
By this time, I should have the system of the robots working and I need to incorporate that into booth for our FYP, and this will probably be the time which we will know where our FYP will take place(in school or in public) and this will change how the booth system drastically, so it will be better to place this at the end of semester break.
Booth System Prototype (Software + Hardware) (3rd Dec – 14th Jan):
after the conceptualization, prototype will come next and I hope to have this done before the start of semester so that I will have the fully working prototype done and having the whole semester to polish my work, troubleshoot and bug fix.
Software and hardware Refinement (14th Jan – 1st April):
Software and Hardware refinement will take up most of the time as the real problem will usually emerge at this point of time where some shortcoming of the project will be apparent, also, there might be good suggestion/advice by people along the way and this will be the time to incorporate these wonderful suggestion into the project.
User Interaction Testing 2(1st April – 8th April):
Testing of the final system, to make sure all parts and component work as it should. if problem found, atleast there are time to replace these components.
FYP Student’s Work Collection 2( 1st April – 1st May):
The final collection of (Hopefully) all of the student’s work and adding them to the system once it’s collected. At the very least, there will be the basic information of every student which is uploaded to the FYP website.
Aesthetic Refinement( 8th April – 29th April):
The polishing and painting of the 3 robots and making of props/items for the booth. (when all software and hardware is working)
Booth Preparation & Stylization (1st May – 8th May):
Production of prints for booth, name cards/postcards and such.
FYP Show Preparation. (8th May – 10th May):
The actual preparation of the Booth and to bring the robots down to the exhibition area and set everything them up.
FYP SHOW( 10th May- 20th May):
Make sure the show runs smoothly, on-site repair if needed.
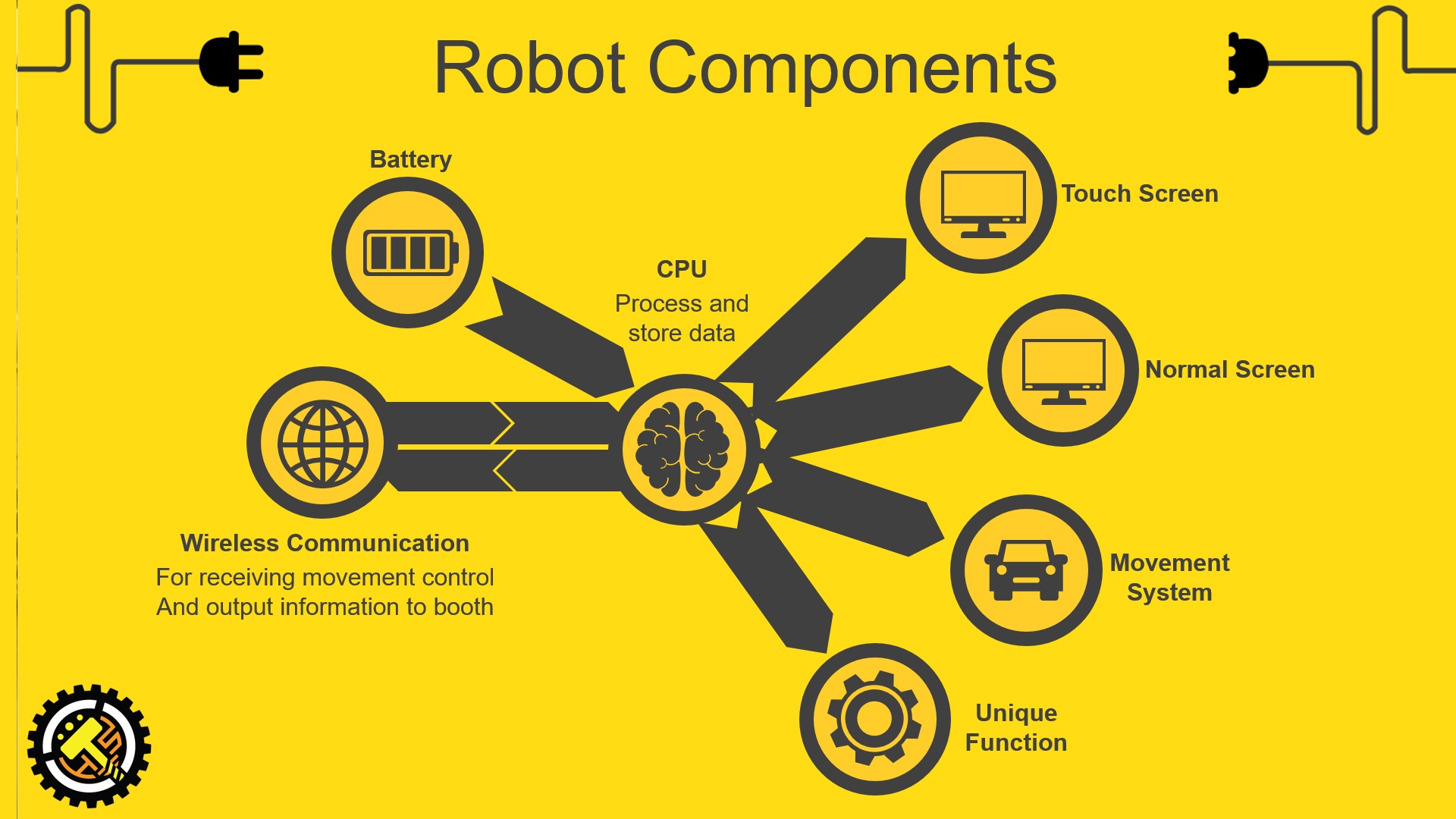
FYP IDEA: To create a system which will benefit the FYP students and gives the guest an improved visiting experience.
researches,
component (pricing, compatibility, functionality, component sponsorship(especially for battery))
softwares (research for platform + udemy courses)
movement (sensors, moving system + hardware) (main moving calculation should be done on the booth computer and transmit over to robots due to power issue, (more computation power it runs, more power it will draw)
continuation from the previous post, part 3 (Initial Project Brief, Specification, Moodboard & Researches),
Project update since the previous post, I decided to shift my focus of the project from ” To build a set of robots that help our FYP Show” to “To build a system that help our FYP show”. The Basic direction and everything is still the same whereby I will still be building the robots for user interactions, but instead of only focusing just on the robots which I feel does not match up to the true potential of this project, I think this project will be about trying to make the FYP show slightly better for us and the robot itself will be just one of the many aspect within the whole system.
Yes, maybe it doesn’t matter because the project will be the same and the only thing that changed was the way that I look at this project but I think this is really important for me because depending on how I look at the project, the course of developing this project will change later on. Instead of narrowing my focus onto just the robot and become fixated into trying to create the perfect robots, I should look at the bigger picture and maybe sacrifice some aspect of these robot and use the time and resources into other aspect of the project like the interactivity of the system, my booth, or even overall branding of my FYP. (yes, branding is not important in FYP, but always good to have. I should consider about branding from now on since I may use it at the end and this kind of thing will not be achievable in the last minute consideration. *atleast for me, I know I am not smart enough to package thing nicely at the end.*)
At the start I was playing out with Company Name Generator to find interesting names, then I came across something like ApolloRobots, Apollo was from Greek mythology and I thought to myself…”Is there a god for creativity?”
And, I found Hephaestus.
According to Wiki *I know this is not a place for doing research, but it is fast place to understand a concept or who someone is.*
“Hephaestus is the Greek god of blacksmiths, metalworking, carpenters, craftsmen, artisans, sculptors, metallurgy, fire, and volcanoes.
As a smithing god, Hephaestus made all the weapons of the gods in Olympus. He served as the blacksmith of the gods, and was worshipped in the manufacturing and industrial centers of Greece, particularly Athens. The cult of Hephaestus was based in Lemnos. Hephaestus’ symbols are a smith’s hammer, anvil, and a pair of tongs.”
As I want to use my project as a tool for all student to have better exposure and the first object that I think about tool is hammer. There I have it, “Hephaestus Hammer”
My Initial design of the logo.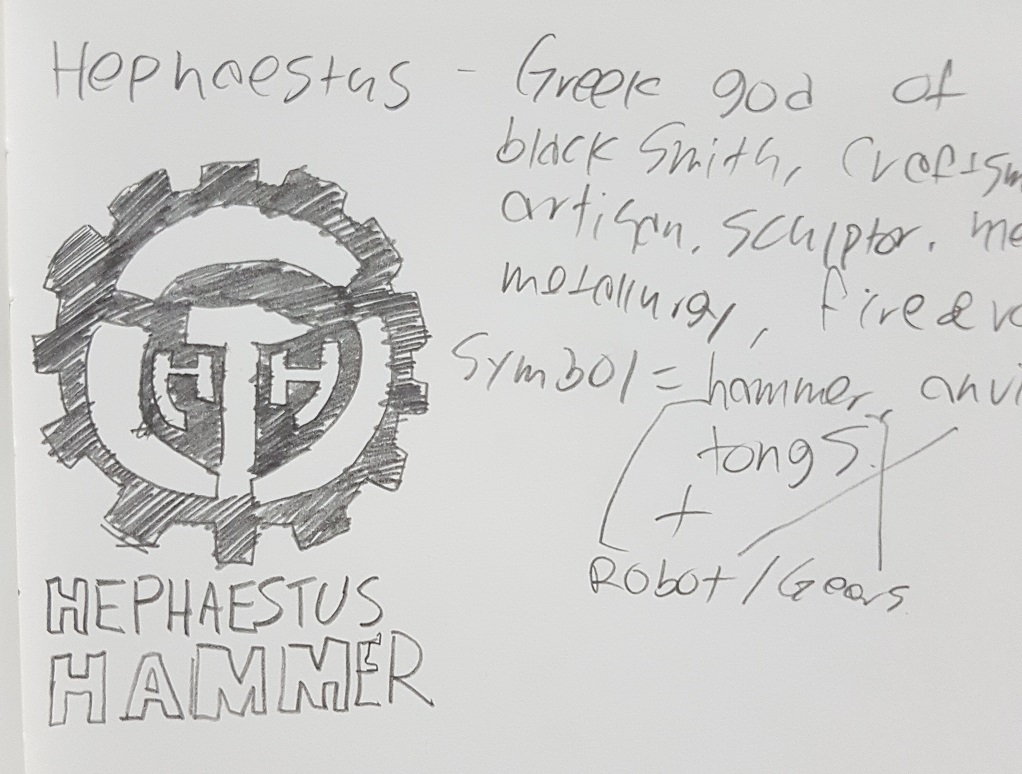
The Logo Evolution
![]()
![]() Hammer + H H (Hephaestus Hammer) Within a gear which represent system/robots, the 3 dots in it represent the 3 robots which I intended to produce for this project. 21 teeth on the gear symbolize selflessness, which remind me that the system will be to serve others.
Hammer + H H (Hephaestus Hammer) Within a gear which represent system/robots, the 3 dots in it represent the 3 robots which I intended to produce for this project. 21 teeth on the gear symbolize selflessness, which remind me that the system will be to serve others.
It was at this point that I figured out that the suitability of the name and logo is really Important, “Hephaestus Hammer”sounded too aggressive and it is not what I intend to do, Unless I intend to make military robots, which I am not. So I changed “Hephaestus Hammer” to “Hephaestus Systems” and the colour scheme from gradient which is really hard to control during printing so I also changed it to flat colours. The reason I switched orientation of tilt was because the H within the logo seemed heavier than the S partly due to the extension of the H below the base line while S stopped at the base line, so I change the tilt orientation to make it more visually pleasing.
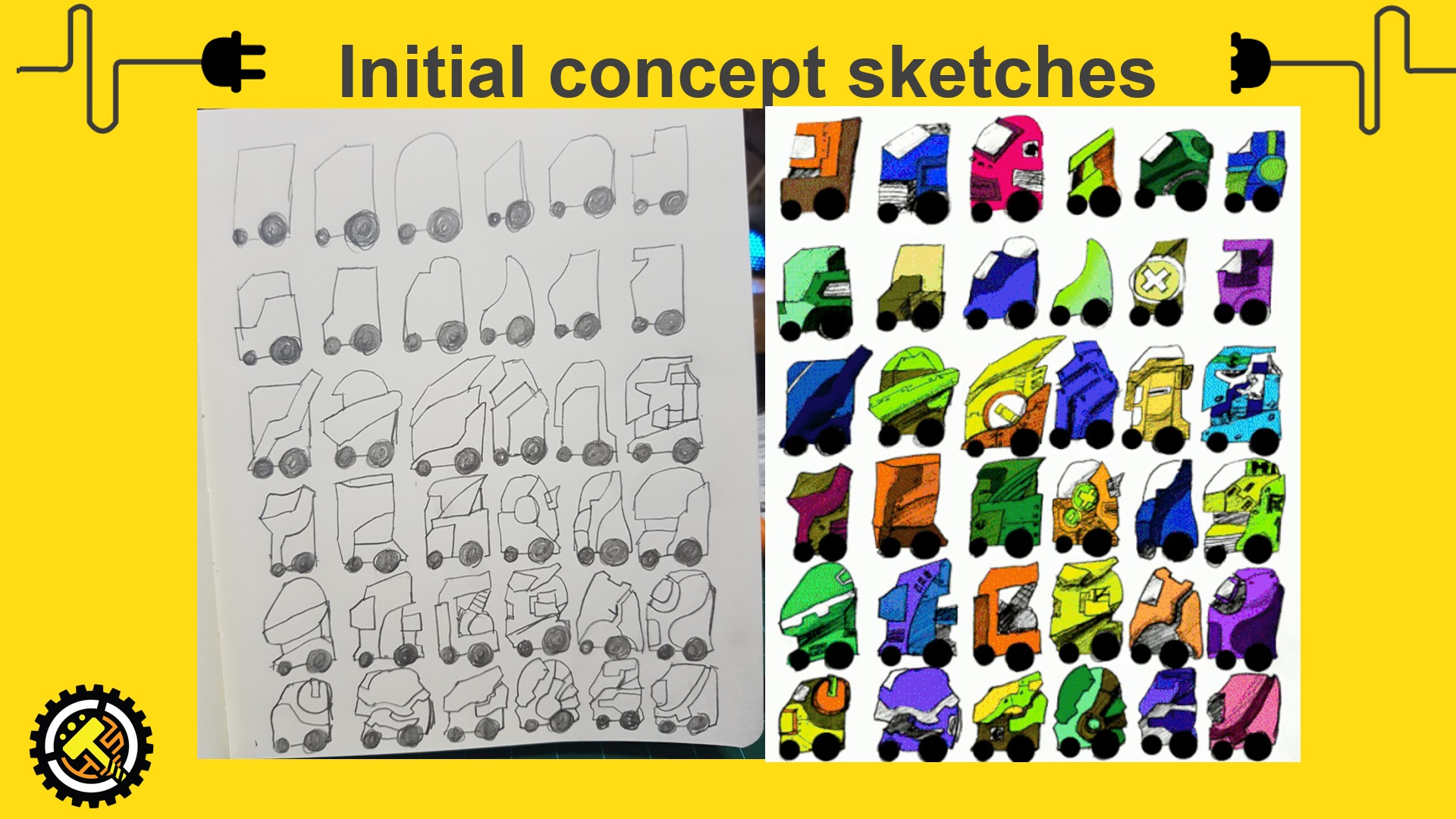
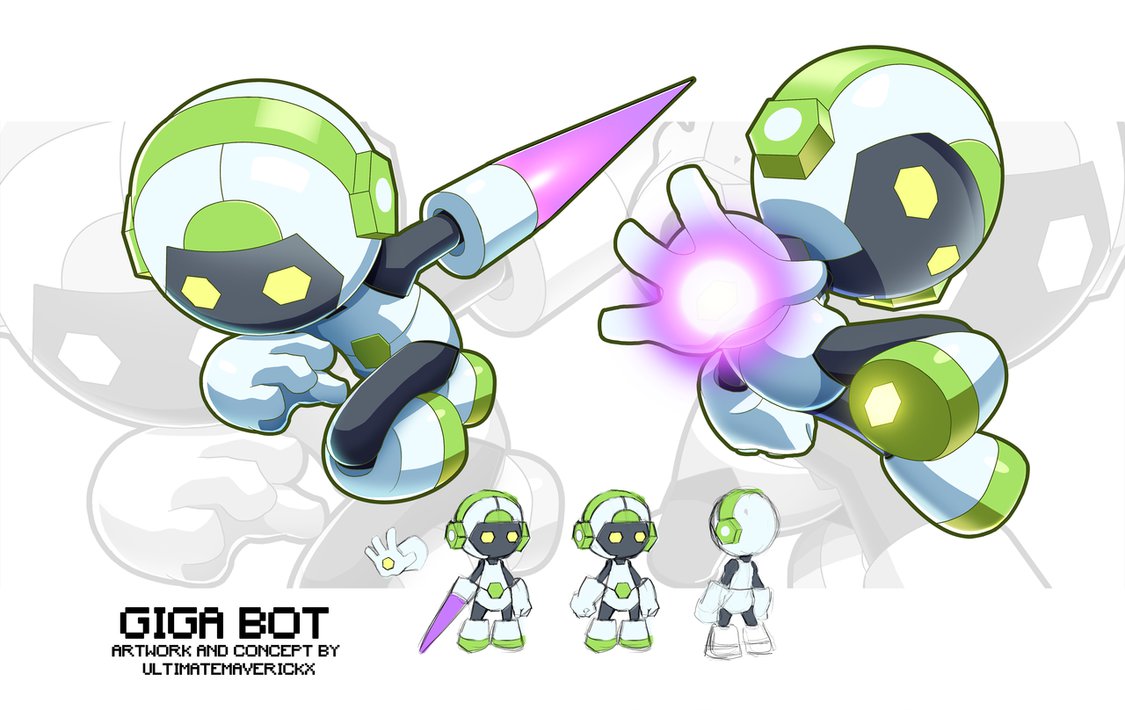
So, after I’ve generate my initial idea of company name and logo, I proceed to develop my idea generation for a better overview of what kind of feeling i want to achieve in the robots which I may build.



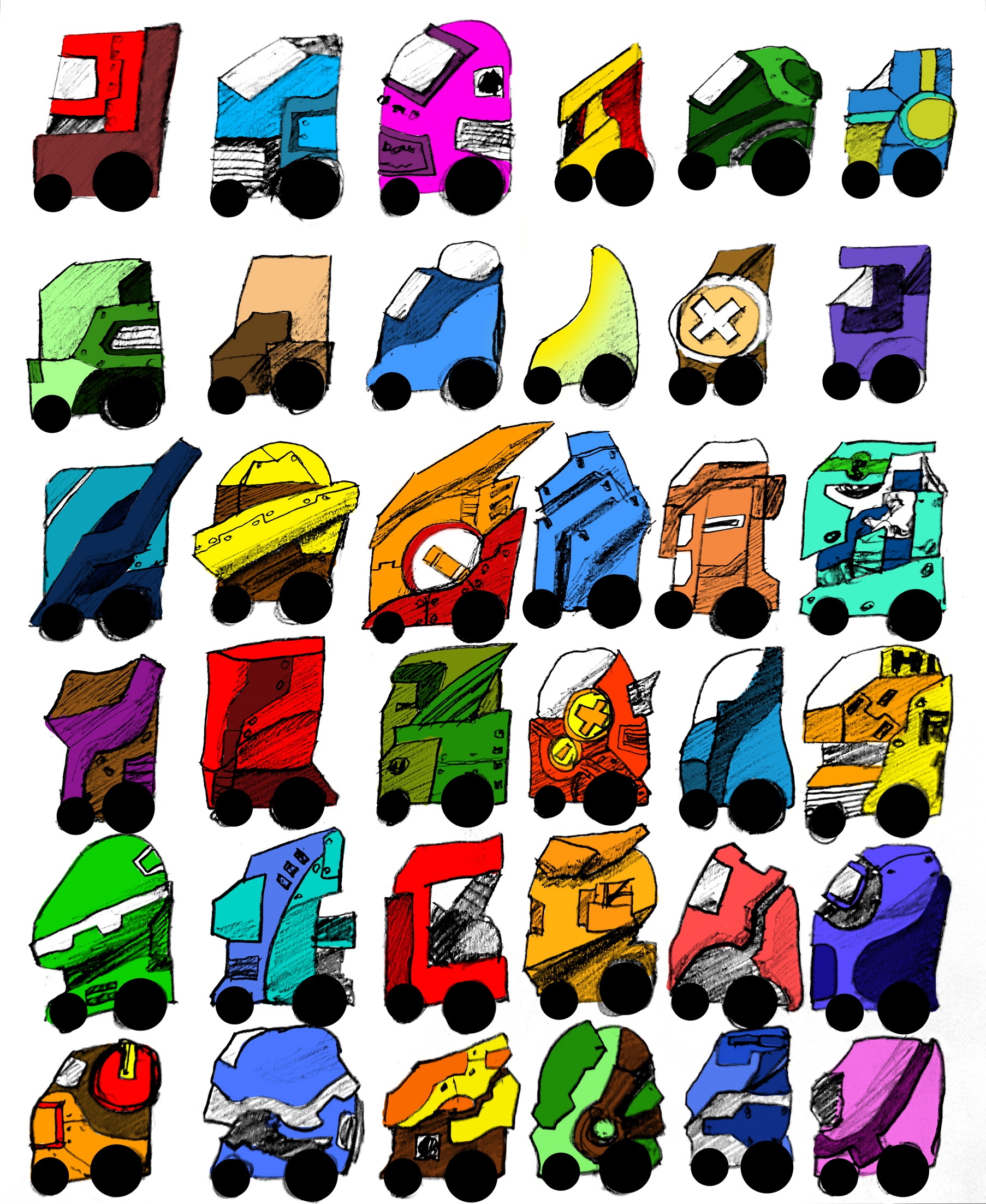 and then I digitally coloured it.
and then I digitally coloured it.
Out of these, I like the third column third row one the most as it really simple and could potentially fit 2 screen onto the flat surface so I’ve decided to further develop it.
Also, this drawing is an attempt to not make an “industrial” like robot like the typical robot that we have in our mind, like this-
as for this past 2 weeks, I had been visiting ADM library to look for inspiration for my FYP in terms of artistic and styling for the overall look and feel for my project, and I found out that the illustration book of movies from Pixar really inspired me.





I’ve also joined many DIY robots groups in the past 2 weeks, these people in there are really helpful and does really amazing projects, the amount of effort they put into their project were astonishing and because most of them treat it as a hobby, I can see their enthusiasm in it.
Like this, they are all really willing to share their incomplete projects and technologies if I asked, more often than not, they will reply! Afterwhich, I did a google search….
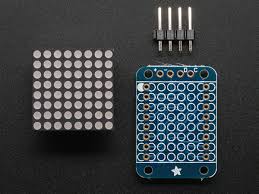 https://www.adafruit.com/product/870
https://www.adafruit.com/product/870
to my surprise, I found out that I already have this exact 8×8 matrix somewhere in my toolbox, maybe I should make use of these wonderful object which I did not previously know how beautiful they are and the outcome will be more than what it appeared to be. (look at this 8×8 matrix as a component = boring. Put it in a cool looking helmet and make it blink like an eye = SUPER AWESOME! )
Kid’s controlled cars (cheap, heavy duty, comes with battery and remote), the size of these small vehicles will be really great for my project and it could easily carry the weight of the robot, maybe around 10kg and still move around efficiently. Furthermore the stability of it appears to be really good for it’s size.


Omni Wheels:
https://en.wikipedia.org/wiki/Omni_wheel
These wonderful wheels move really well and when built and code properly, I really like these and it could even go side way and look way too cool. The reason they work this way is because each wheel could rotate in 4 directions (front back left right) and as a bonus fact, since their axis of rotation will not change while the direction changes, the stability of these wheels will be really incredible.
Tracks

Like A tank, they usually have low speed(which is what I need) and also really high in stability, however the downside is the power efficiency unless I purchase a really good track which will be rather expensive, so unless really required, I will probably not go with this.
I will Probably go for one or two these systems depends on availability, the base line here will be that it will all be the same system as I would prefer to create one app for all 3 robots rather than different apps due to the different system used.
1- CPU with a normal monitor upgraded with touchscreen interface.
This is probably the most cost saving, but the logistic and power consumption seemed to be a problem (unless I use energy saving computer or mini computer, will do more research about this)
2- CPU with a touchscreen monitor.
Probably not this as a basic touchscreen monitor will be really expensive.(easily 800 and up, and I need 3 at minimum )
3- CPU with a tablet modified into a touch screen monitor.
More research need to be done in this system, probably the hardest of all options due to the technical difficulties to modify (software and hardware) the tablet and also finding a cheap and good tablet with well documented modification will be challenging.
4- Refurbished touchscreen laptops.
This is really a good choice due to power efficiency and I will also save on CPU
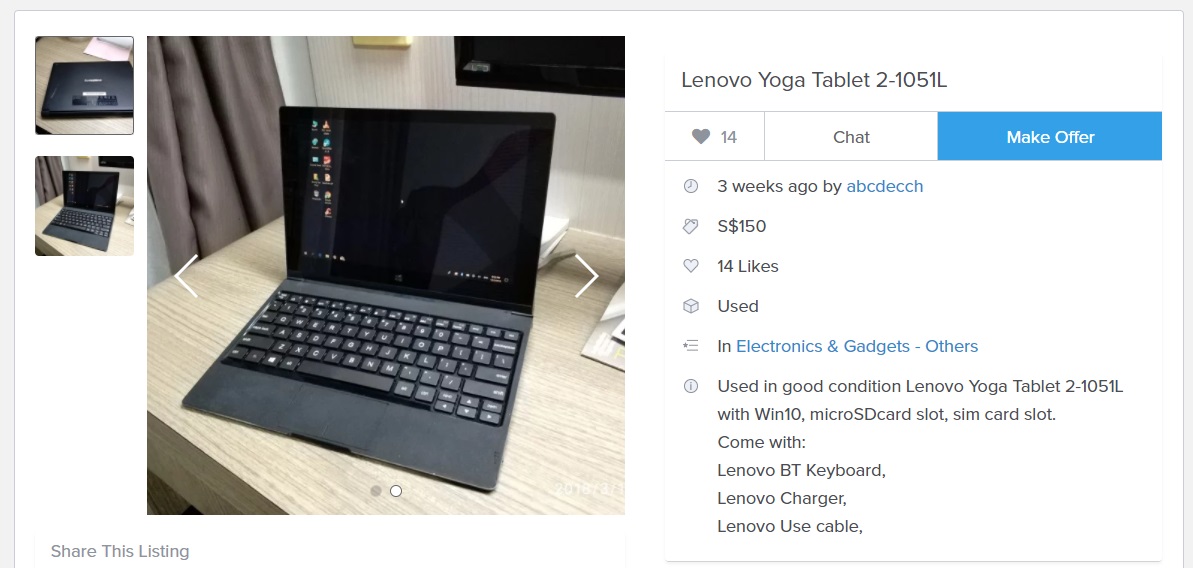
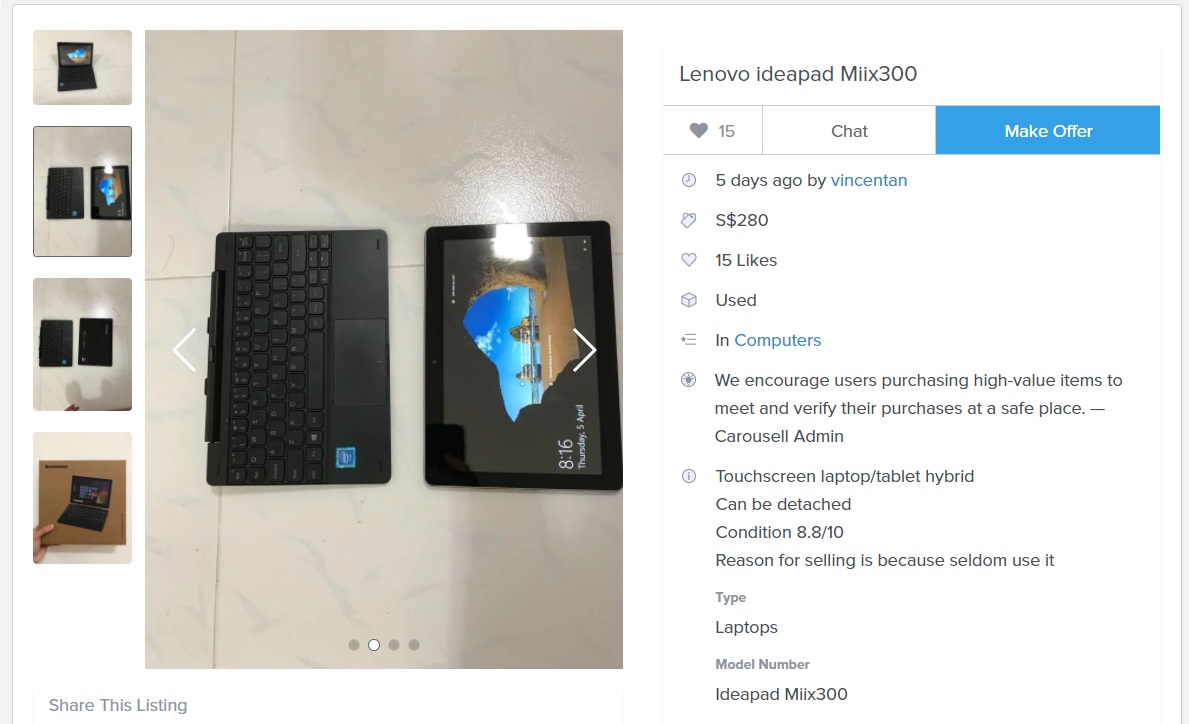
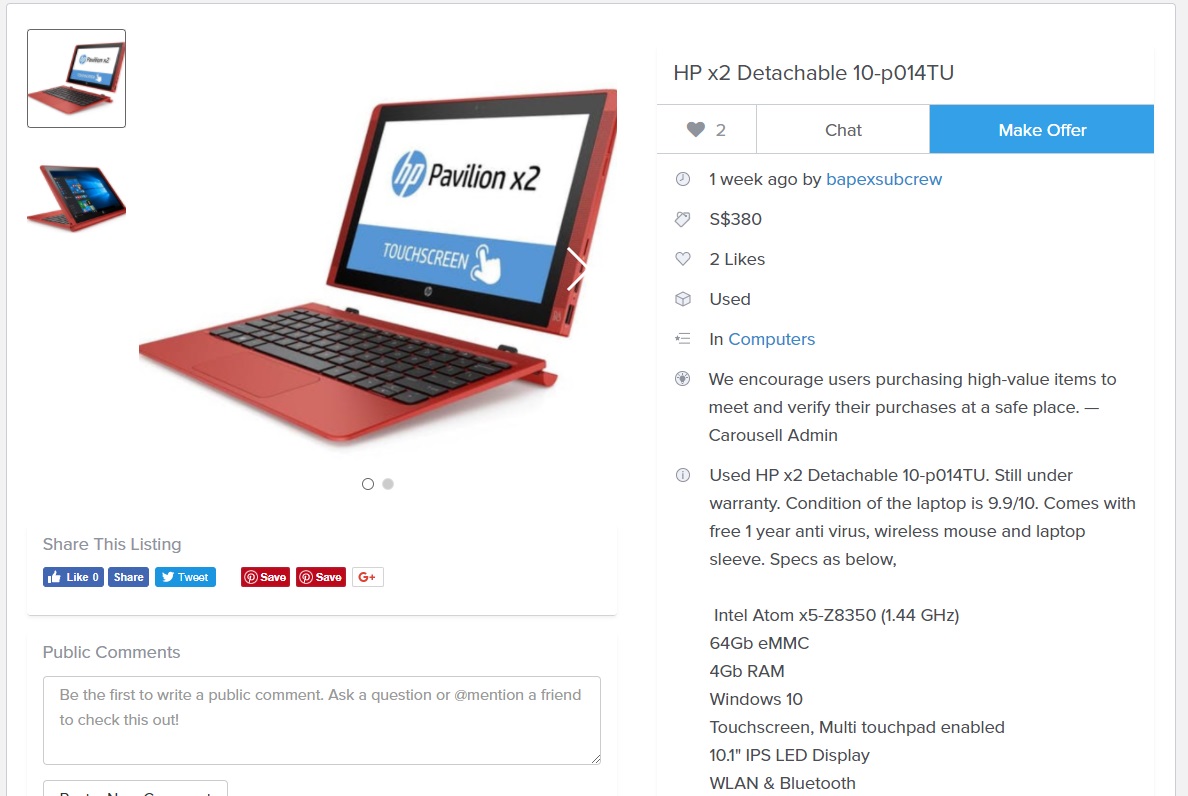
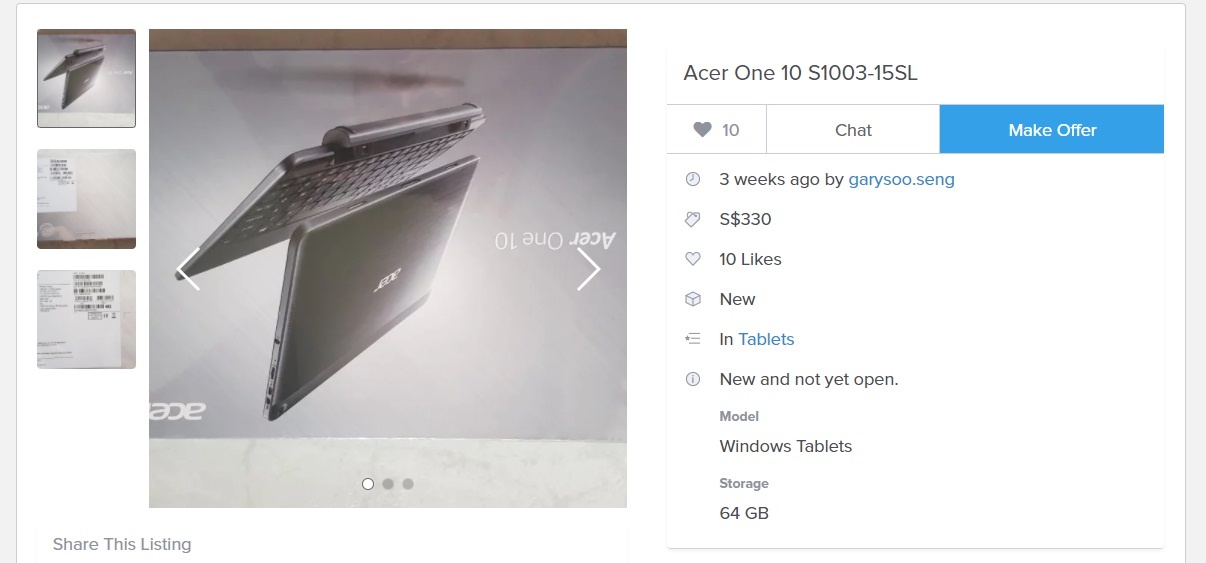
5- Windows based Tablets that supports output like HDMI and USB.
Alike the touch screen Laptop, this will be really similar, except that sometimes I dont really need a keyboard and touchpad as it is touchscreen.

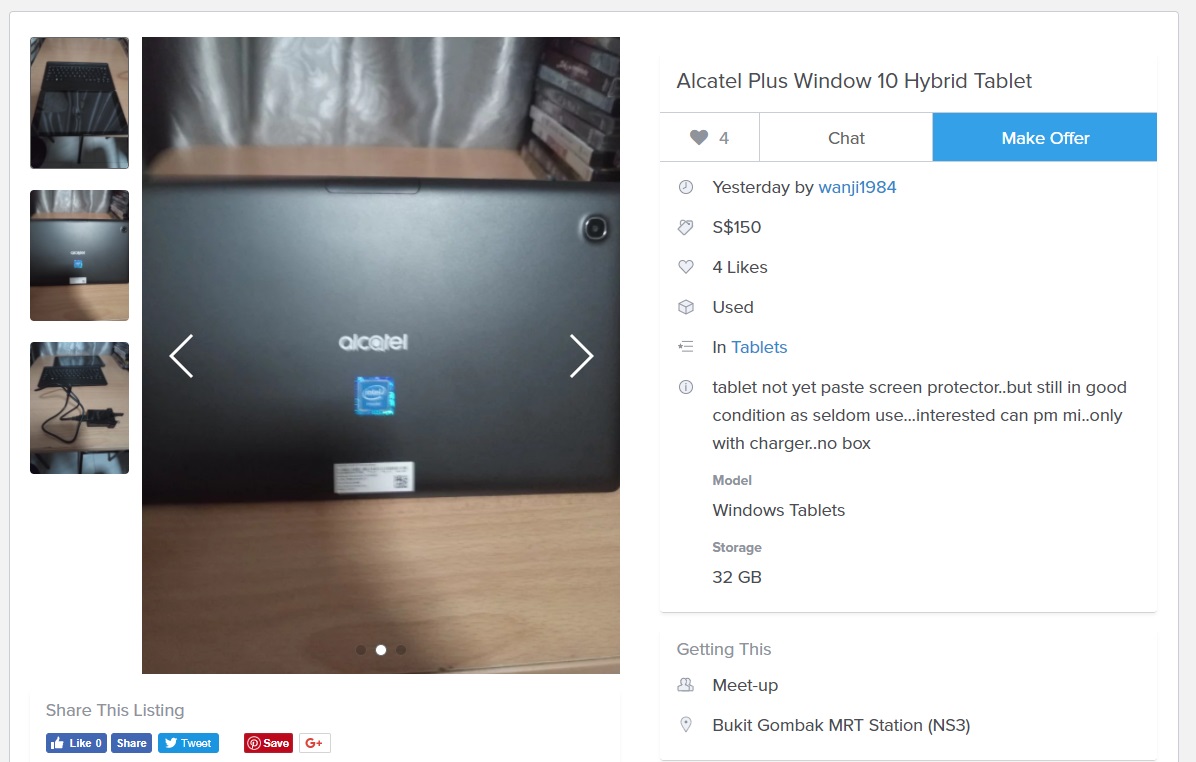
https://www.gearbest.com/tablet-pcs/pp_1362098.html
https://www.gearbest.com/tablet-pcs/pp_626050.html?wid=37
https://www.gearbest.com/tablet-pcs/pp_356017.html?wid=37
continuation from the previous part 2 post with some new ideas after the talk about the past FYP showcase from Assoc Prof Laura Miotto, I’ve been inspired to do something that focuses solely on the showcase, since the showcase will mark the end ADM life of all current year 3, I would like to do something for many of the peers that would enhance student’s FYP showcase capability as well as the visitor’s experience of the visit.
As the founder of Kimchi and Chips, Elliot Woods asked during the Emergent Visions Symposium,
“What is the work that only I can make?”
This question hit me like Tiger Woods golf clubbed me in the head…
Yes, what is the work that only I can make in this coming FYP showcase?
back to my first post, I’ve already know what my strength is at this point of time, I would really want my FYP to have an impact on others, why not use my strength into making other’s FYP presentation to potentially having slightly more possibility? Wouldn’t that be great?!
so, this will be an idea which I know that I would enjoy spending a year to complete.
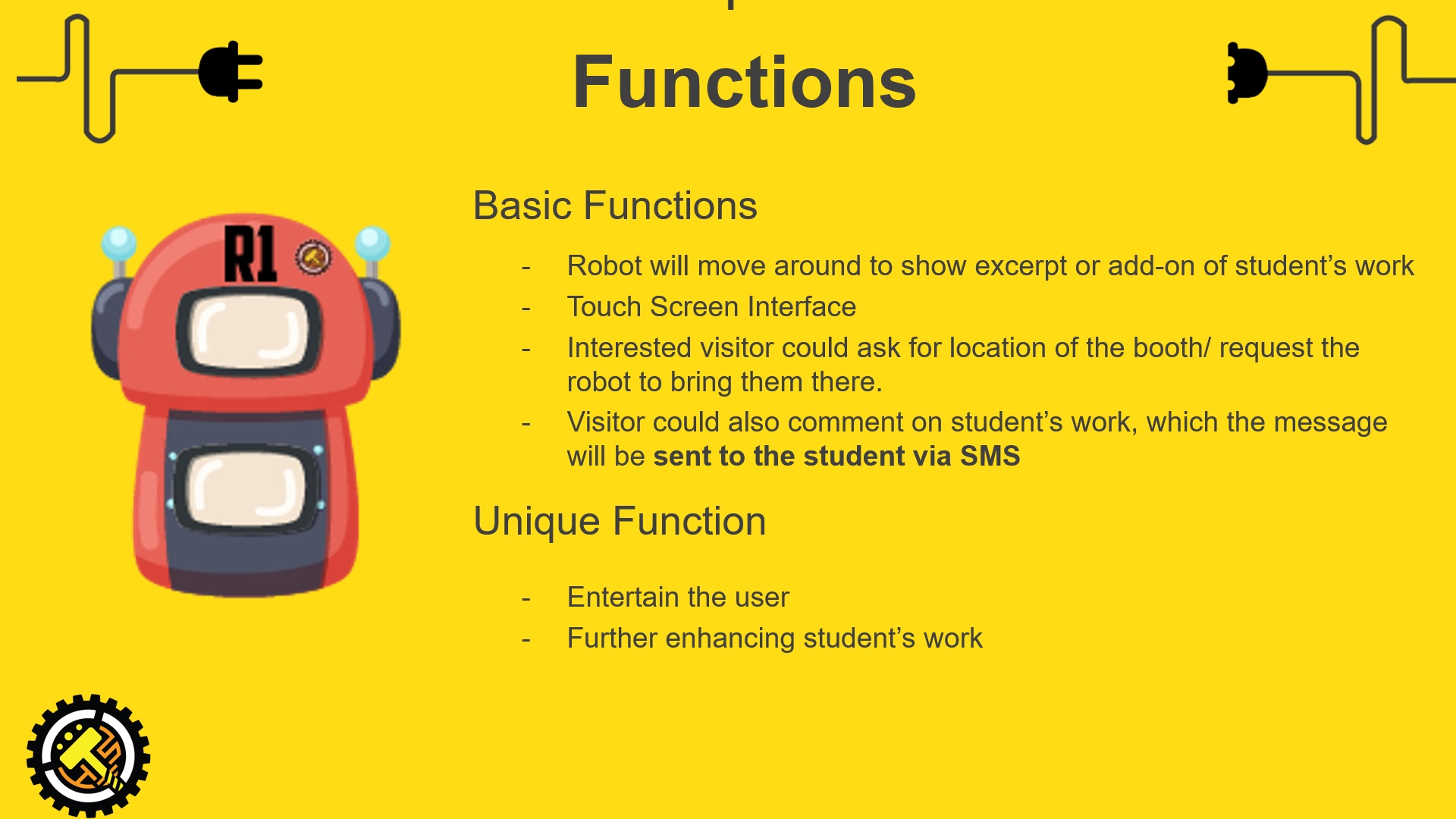
Just imagine, every student have their booth while a robot moving around in the FYP show displaying their project on its screen, when a visitor saw it on the screen, got interested and wanted to see the booth, they simply click a “Bring me to this booth” button and the robot will do so. How much more potential exposure will that bring to that student?
And on another aspect viewing this project, what will be realer than an actual application of an FYP project during the FYP show? What the visitor sees is what was actually made specially for that FYP show, if it doesn’t work or spoiled halfway, it simply meant that I did not plan well/have a backup or do a good enough job but there will not be an imaginative scenario where “This FYP was supposed to work in another location” *I am not saying that that kind of project isn’t good, but just what I would not like to do*
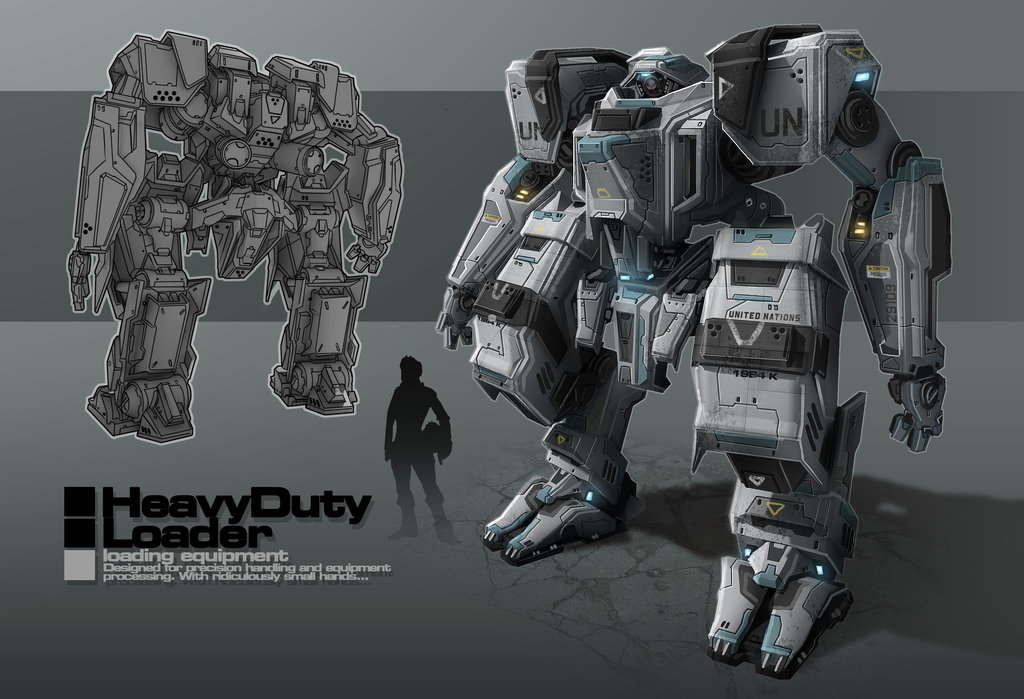
To design a set of Robots that have the ability to move around while avoiding people/obstacles during the FYP show. The purpose of the Robots is to expand the presentation possibility of student’s project while enhancing the experiences of the visitors. Safety of the people around the robot should be of the utmost importance and under no circumstances whereby injuries caused by the robot should happens.
Although it will be really hard to do so, but I aimed to complete a project of this standard but the task which my robot will do is much simpler.


















There were many considerations made for this aspect of the project, firstly, the Cost and Value Analysis of the system must be made, of course, if money isn’t a problem, then this part would be really easy as I will just get the suitable parts which I need for the FYP, but sadly that isn’t the case… Money is a problem in FYP.
So, how can I maximize the output of my project by using the minimum amount of money? I have to also consider about how strong/fast the system is, and how would I like to have the user interface (touch screen) to be incorporated into the system.
These are the types of computation system which might be possible for my project at reasonable price –
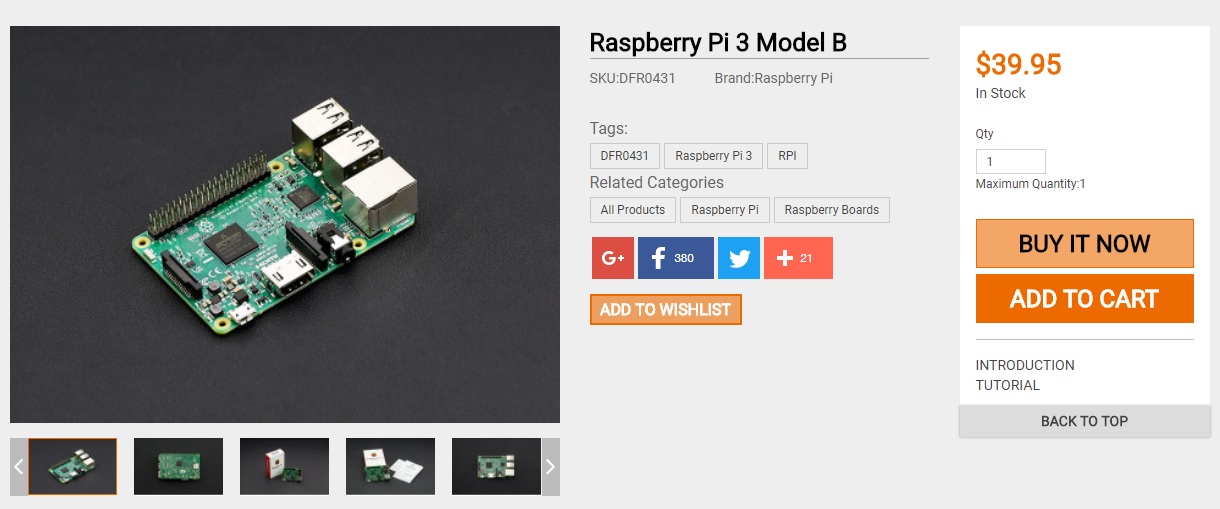
This is the latest Raspberry Pi 3. It features a 1.2GHz 64-bit quad-core ARMv8 CPU with 802.11n Wireless LAN and Bluetooth 4.1. Like Raspberry Pi 2, it also has 1GB RAM,4 USB ports,40 GPIO pins,Full HDMI port and Ethernet port. This third generation Pi is an excellent tool for hackers, makers and educators because of its small footprint, low power consumption, and low price.
Pi 3 comes with build in WIFI system so that would save me about $30 for WIFI module, output of screen is easy to setup(like a normal computer), runs on Linux system, which I have a slight experience on and as a bonus, I own one of this so that would save me some money too.
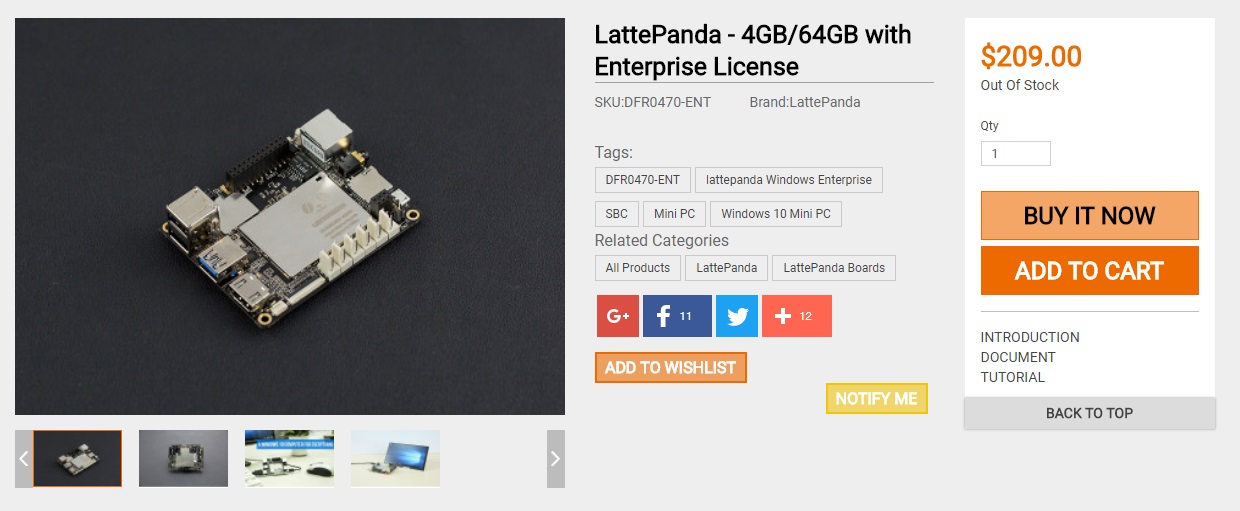
A LattePanda is a complete Windows 10 single board computer. It has everything a regular PC has and can do anything that a regular PC does. It is compatible with almost every gadget likw printers, joysticks, cameras and more. Any peripherals that work on PC will work on a LattePanda.
In terms of processing strength, completely overpowered Raspberry Pi 3, the price is however much steeper than Pi 3, also as an added bonus, I already own a Lattepanda and I would rather work on Lattepanda over Raspberry Pi as it runs on Windows system and that would save a huge amount of time for me, plus overall it is much faster at processing video and even runs Max MSP(a programming software) which is what I will probably be using. I am sure Latte Panda will be more responsive than Raspberry Pi 3 at the cost of more $$.
Yes, I praised so much about Lattepanda, but the cheap CPU nowadays is already cheaper than a LattePanda, although bigger,heavier and more power hungry, it is way cheaper than a Lattepanda at relatively same processing power and also, a cheap CPU usually comes with Internal HDD(atleast 128GB) while Lattepanda only has a mere 64GB(minus operating system installed, leaving about 40GB). Best part, Desktop CPU comes with built-in cooling fan, which overheating is a problem for Lattepanda.
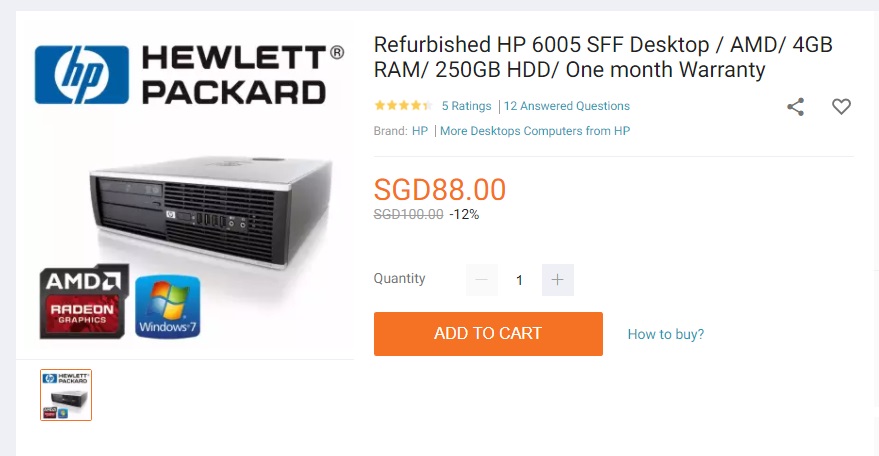 *REFURBISH is the word here hence the cheap price*
*REFURBISH is the word here hence the cheap price*
since I don’t really need a brand new computer to get the job done. This is the normal sized CPU, which is rather big but I am sure it is small enough to be build into a robot.
For me, I think that this is the best system i could think of for now which I will need, firstly, touchscreen laptop meant that I do not need to purchase another separate touchscreen(which is usually really expensive) secondly, it comes with all the benefit of a CPU like cooling fan and such, also, laptop have a additional battery which reduce the load of the power supply, like if the main power supply ran out, there will still be time for the system to send out notification to the control system which then battery could be replaced. lastly, laptop will be slightly lighter and uses lesser power in comparison to a CPU, which make it really good over a normal CPU.
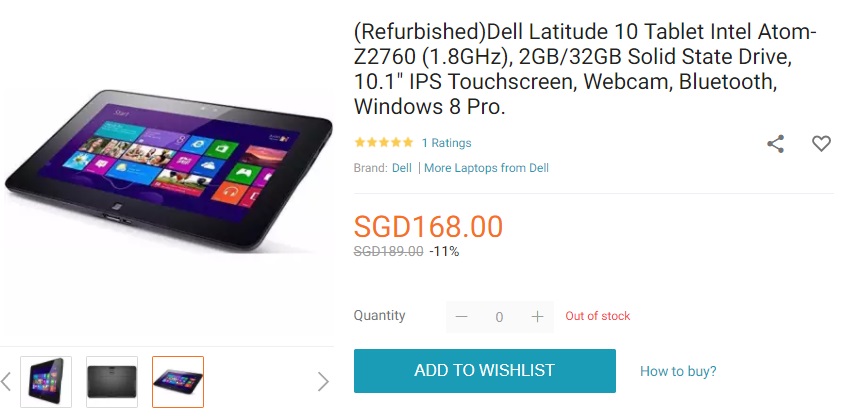

These are really good deal I think, I have been also browsing on carousell to find cheap and well condition touchscreen laptops, will update when I found some.
Since I don’t have sufficient knowledge in programming for windows system or app, so I also looked up for some online courses which I think I may follow during the holiday.
 https://www.udemy.com/the-complete-windows-10-c-course-and-build-2-apps/
https://www.udemy.com/the-complete-windows-10-c-course-and-build-2-apps/
This will be useful for my own personal knowledge as well as for this FYP, courses are from Udemy and they usually have offer on their courses, I could just wait for the $5.99 or $9.99 sale.
If I were to use a car battery, I would get the deep cycle/marine battery as it is made for continuous discharge when connected to my computer within the robot/motors.
After the previous post here and presented it in the class, Kristy asked me about what group of people I would like to target for the direction of the FYP. I had not really thought about that before it, but after a week of researches and further thinking about the constraints which I will probably face while doing the FYP, I came up with a few criteria for choosing my target user so as to segment the broad differences of people around the world.
Firstly, people from the developed country. Because I am currently living in Singapore which is relatively advanced, my cultural upbringing, my daily life consist mostly of what a citizen from a developed country would experience, since I do not have sufficient understanding of what I am not used to and could potentially do more harm than good in a developed country, by targeting a people from the first world meant that I could get the researches done and the feedback I need readily.
Next, out of the developed country, my interest lies in Asia country, more specifically, Japan, South Korea, urban China, Taiwan and Singapore. As I am more inclined towards the cultural aspect of these countries, moreover, these countries are relatively cheaper if I am to go there do my researches(there’s a possibility that I might do so.)
For the FYP, I would like to produce something which could help the life of a students, this is because students are relatively similar throughout the countries which I am interested in. Also I would like to do something that could help the student of age 21 to 28, primarily because most of my friend falls within this category, this is also the age group who started to be legally labeled as adult, although none of the student would seem themselves as one (including me).
Mainly someone who would like new technology and with short attention span who are open to changes. This is because I would like to produce something at the end of the FYP which will be tapping into the current technological ecological system like the smart phone or computer, the short attention span of the millennials seemed like a negative aspect, but I think that there are potential to tap into these “negative” behavior and make it into the strength of my FYP, like how the fidget spinner swept the trend a year before, something that make no sense will seemed like an good product in the eyes of the beholder.
For now, I’ve got 4 ideas that I think that it might have some potential in it.
First, it is to create something that will help students in taking notes/writing/ drawing, like a Wacom Cintiq for computer application, or specially designed for note taking like the Wacom bamboo Folio or Sony Digital Paper, however the Sony digital paper and Cintiq were designed for professional uses and their price point is rather steep for students. The Bamboo Folio is placed in the zone for note takers and scribblers to write/draw on the paper and still have an digital copy of it at an reasonable pricing. These were wonderful technologies which helped greatly in the transition of going from the traditional paper to the digital note taking, which the millennials spent the first half of their life having notes on paper while the recent half in digital notes, while not all will prefer digital notes over physical one, it proves to be a really good tool as the cloud sharing enhanced the capabilities of these students.
Second idea is to create something that will help to manufacture prototype at a better standing, be it cheaper or faster. As I would like to create something like a 3D printer specially for design student who need to produce physical work throughout the course of their creativity studies, although the current 3D printers in the market generally which suits the need of almost everyone who needs it, there are still room for improvements for these wonderful machines like the ability to print in different materials at a cheaper price. How about 3D foam printer? 3D Glue printer? maybe, maybe not.
My third idea was the idea that I was considering for the longest time and currently is inclined towards, a human powered electricity generating machine which not generate electricity, it would generate digital currency that represents “clean energy points” which could be used in various digital function like an in game currency or the capability to exchanged into discount coupons to be used in real life shop. While this may seemed impossible that there will be any market for this, it might actually be used in the future due to a few reasons..
1) User could use this as an emergency charger to charge their smart phone, which the battery usually last only half a day and the millennials could not live without their phones.
2) The rate of obesity is rising and partly it is due to the lack of exercise, these human powered electricity generating machine could be viewed as a workout to promote better health, at least by a tiny bit. Also, Gamer rarely exercise, so if there’s a game that encouraged them to play by exercising, there’s a possibility that they might. (like what Pokemon Go did when it was first launched, Gamers are walking more than they usually would because of the game.)
3) Incentives will be given to the users and participating shops, by generating electricity through these machines, not only the user could charge their electronics, they could save a slight amount of bills and earn discount from the shop. While participating shop would gain more customer as by having their shop appearing in the app for exchanging, it serves as an advertisement to their shop. Moreover, by participating, the shop could have the positive label of “environmentally conscious”, “taking part to increase clean energy production” which it seemed like what a medium sized cooperation would do for their branding effort.
My last idea of this post is simplest and might be applicable to everyone rather than for the targeted audiences… I would also like to create playful machines, systems, or applications that make people smile through the interaction, if I went along with this idea, I will probably create a diverse series of artifacts(digital or physical) that is funny in hope that they will bring the happy memory along with them after the FYP show.
According to Neurologist David Eagleman, there’s a scientific reason why our first(few) idea isn’t usually our best one: Our brains are lazy, and the first idea we have is usually the handiest idea, rather than the best idea. I understand this fact that the ideas that seemed appealing to me now might not be the best idea, so I am still coming up with new ideas that could contest the idea I am currently having, but for now, that is all I have.
In my initial general direction, I think that there many approach to consider what kind of FYP I would like to achieve in the end… Maybe instead of thinking what I can possibly do for my FYP, I feel like it is better for me to think about this question- “What can my FYP do for me?”
By this time, I already understand what is my strength and what I would love to do, I think that I am relatively skilled in handicraft, building physical object and would love to build challenging mechanism like my Obseleting Instrument I did for Interactive Devices in year 2.
But will doing what I am good in and what I like for my FYP really help me? It might look good in my portfolio, but at the same time, it simply means that I will be staying in my comfort zone, and I am not saying that there’s nothing for me to learn by doing so, but rather, it means that I am locking myself into just doing related project and narrow down on the infinite possibilities that could be ventured into an unexplored territory that I did not previously knew that I like. In the long run, doing something which I could achieve might not be that great afterall….
If I think about FYP as a “One Year Summary Exercise” for the 3 years here to showcase what I’ve learnt in NTU, the result of that FYP will be way different than if I were to think about it as “One Year Opportunity to learn and explore”. but the question here is….. How would I want to think about FYP as? And seriously, I dont know for now…
If we think about FYP in another perspective, It is a small label that will be attached to us upon graduation, we write this label ourselves, work hard to earn this label and once it is on us, there will be no way to change it. Of course, I am not saying that FYP will be super important to all of our life, but the fact that one year of preparation just for the moment of showcase, if its good, good for us, but if its bad, forget about it, there’s still many other things in life which will be more important. Label Yourself Before They Do
Label Yourself Before They Do
So, back to the question, “What do I want the FYP to do for me?”
Now I’ve got one year to do whatever I want,(I love Interactive Media~~)
this is the time to ask… What do I really want?
Doing something beautiful and looks nice with no meaning? Definitely not my cup of tea.
Artistic pieces with deep meaning that people will ponder over it? Maybe? But I am too shallow for this.
Pure visual/ sensory inducing project? unless one that will help the scientific/medical field.. for art purpose, not interested.
something easy?
I can only think of one right now….
I want to change the world at least in a minuscule way and leave some footstep on the sandy beach(not literally) before I die. I would love to have an impact on people’s life in someway, somehow.
Big dream require small steps, maybe, just maybe, this FYP could be these small steps….
I have this A5 note as a motivational quote behind the desktop screen which I wrote long time ago for myself
“Create something that I want but unavailable in the market, not something that would sell.” – ZiFeng
Now, building on what I mentioned above –“One Year Summary Exercise” VS “One Year Opportunity to learn and explore”, now I’ll nominate a new contender – “One Year Opportunity To Make an Impact/Benefit Others” and truthfully speaking, I like the latter the best and for now, it will be what I would like to achieve for the FYP.

Did I change my question from
“What I can do for my FYP?”
to
“What my FYP can do for me?”
to
“What my FYP can do for others?”?
Yes I did.
And I quite like my direction for now, unless I’ve got a better direction that I could come out with before the end of this semester, I will probably go along the path of “Impacting/benefiting people” and think of what I could do along this path. (I am already excited thinking to think of ideas)

 I stated to learn by building chest as it got similar shape of what I want to produce, and after this, I used the skills i learnt from here and applied into the attempt of my R1 Robot.
I stated to learn by building chest as it got similar shape of what I want to produce, and after this, I used the skills i learnt from here and applied into the attempt of my R1 Robot. Side view
Side view Front view
Front view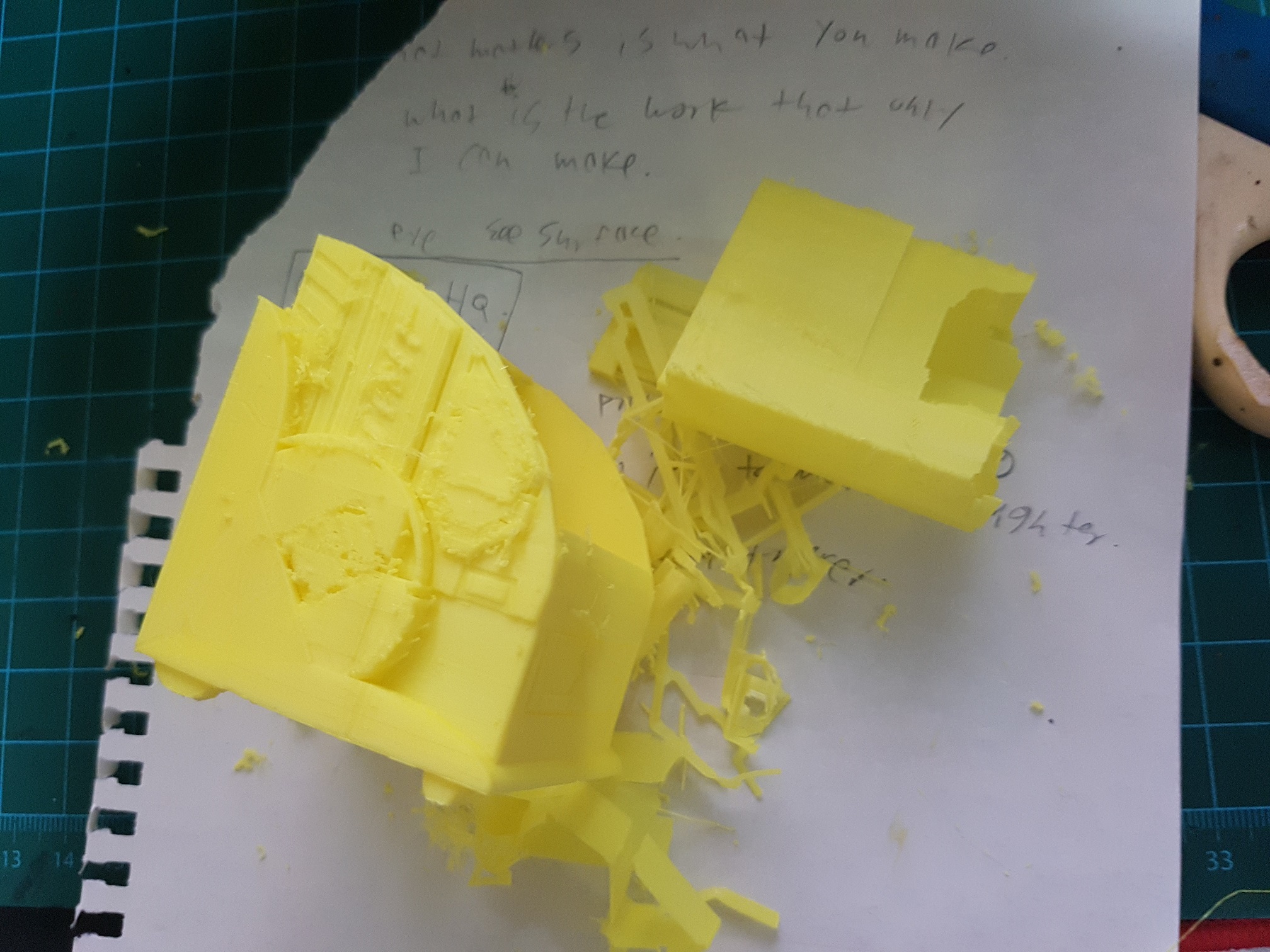 the surface detail was not able to be printed due to the mistake I made during modeling, which creates an non solid surface and therefore not printable.
the surface detail was not able to be printed due to the mistake I made during modeling, which creates an non solid surface and therefore not printable.
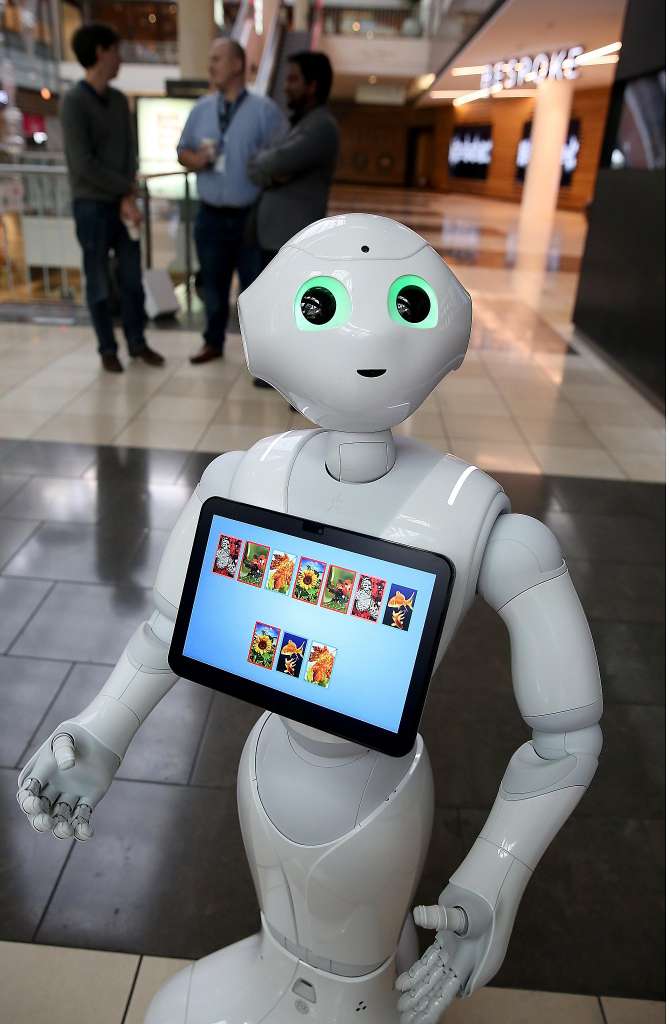
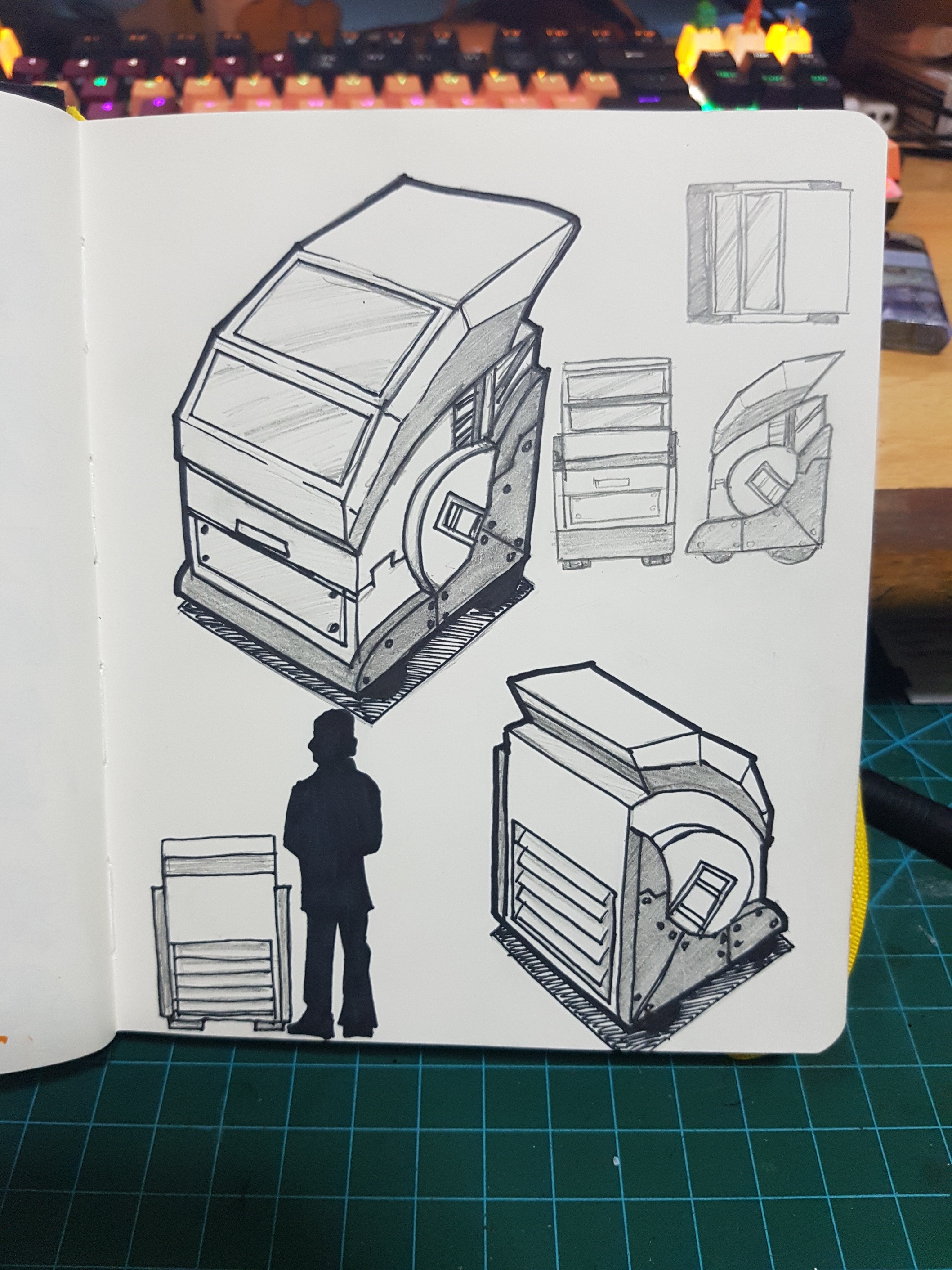 This will be the general appearance and sizing of the robot and I will probably change it drastically along the way, however I would like to use this as an example to explain about my project. Without this drawing, I normally explain to people by saying “a trash bin alike robot that move around” and by trash bin, I simply meant no limbs and I think it will be rather misleading.
This will be the general appearance and sizing of the robot and I will probably change it drastically along the way, however I would like to use this as an example to explain about my project. Without this drawing, I normally explain to people by saying “a trash bin alike robot that move around” and by trash bin, I simply meant no limbs and I think it will be rather misleading. White humanoid with round, smooth features, almost no surface detailing and no styling, just a LED eye or sometimes a screen on its chest. Nope, I don’t want to do it like this.
White humanoid with round, smooth features, almost no surface detailing and no styling, just a LED eye or sometimes a screen on its chest. Nope, I don’t want to do it like this.
 https://www.udemy.com/windows-iot/
https://www.udemy.com/windows-iot/ https://www.udemy.com/the-complete-design-course/
https://www.udemy.com/the-complete-design-course/
{kind=link}