According to Isaac Asimov ,
the three laws of Robotics:
1) A robot may not injure a human being or, through inaction, allow a human being to come to harm.
2) A robot must obey orders given to it by human beings except where such orders would conflict with the First Law.
3) A robot must protect its own existence as long as such protection does not conflict with the First or Second Law.
Sounds really awesome isnt it, of course, there are situations that the robot will be forced to break these law, but again…. what if a robot is made to go against the first 2 law?
1) A robot may lightly injure a human when required to get the task done.
2) A robot may not obey all orders given to it by human beings.
3) A robot must protect its own existence and continue to execute the first and second law.
sounds really funny to me, doomsday robot? AHAHHAHA! sure, why not? ok maybe not. These laws are still in conceptualizing phase and if it made into the final project, it will be quite funny for those who read or knows the three law of robotics.
What was done until now after the last update?
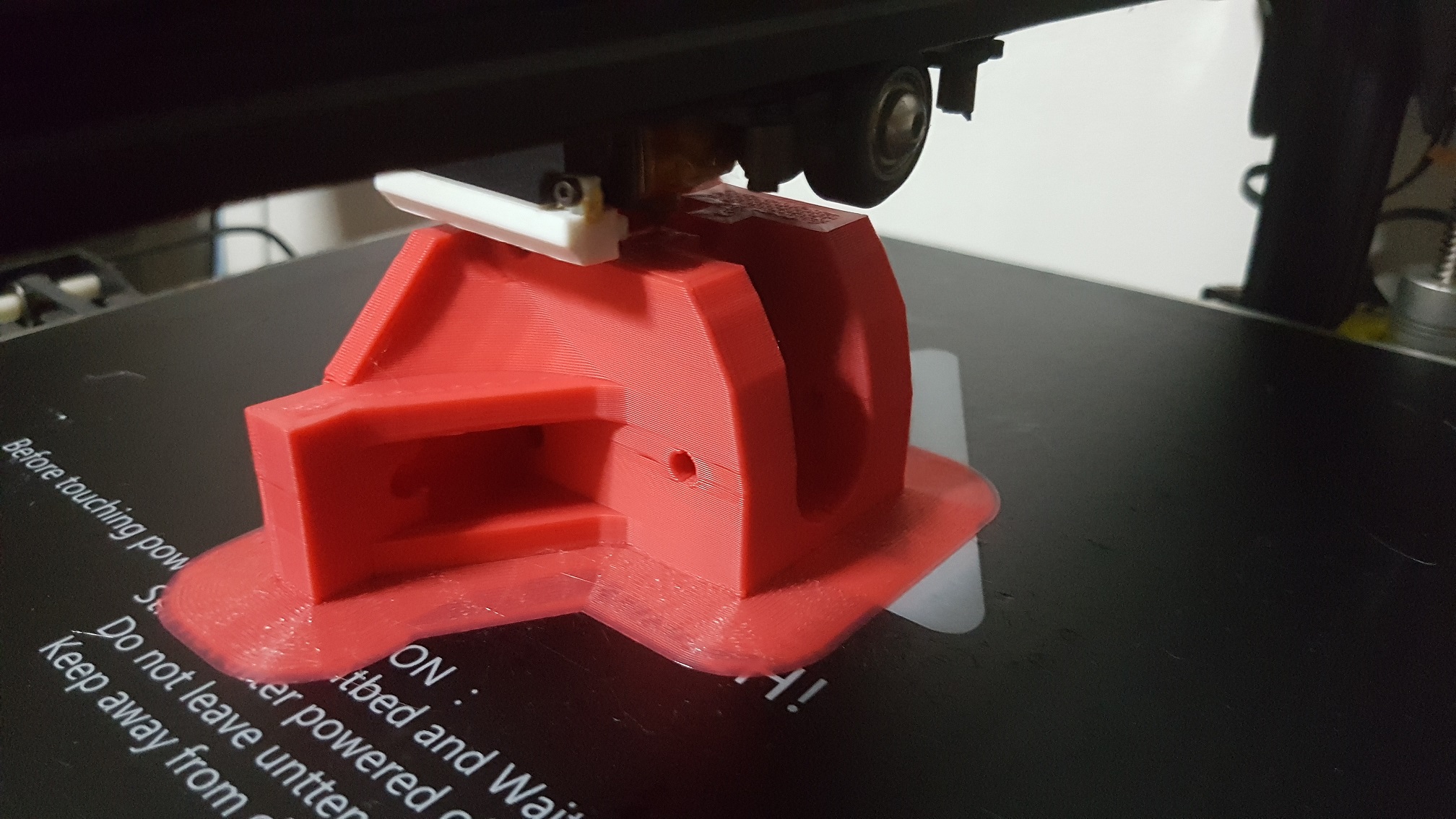
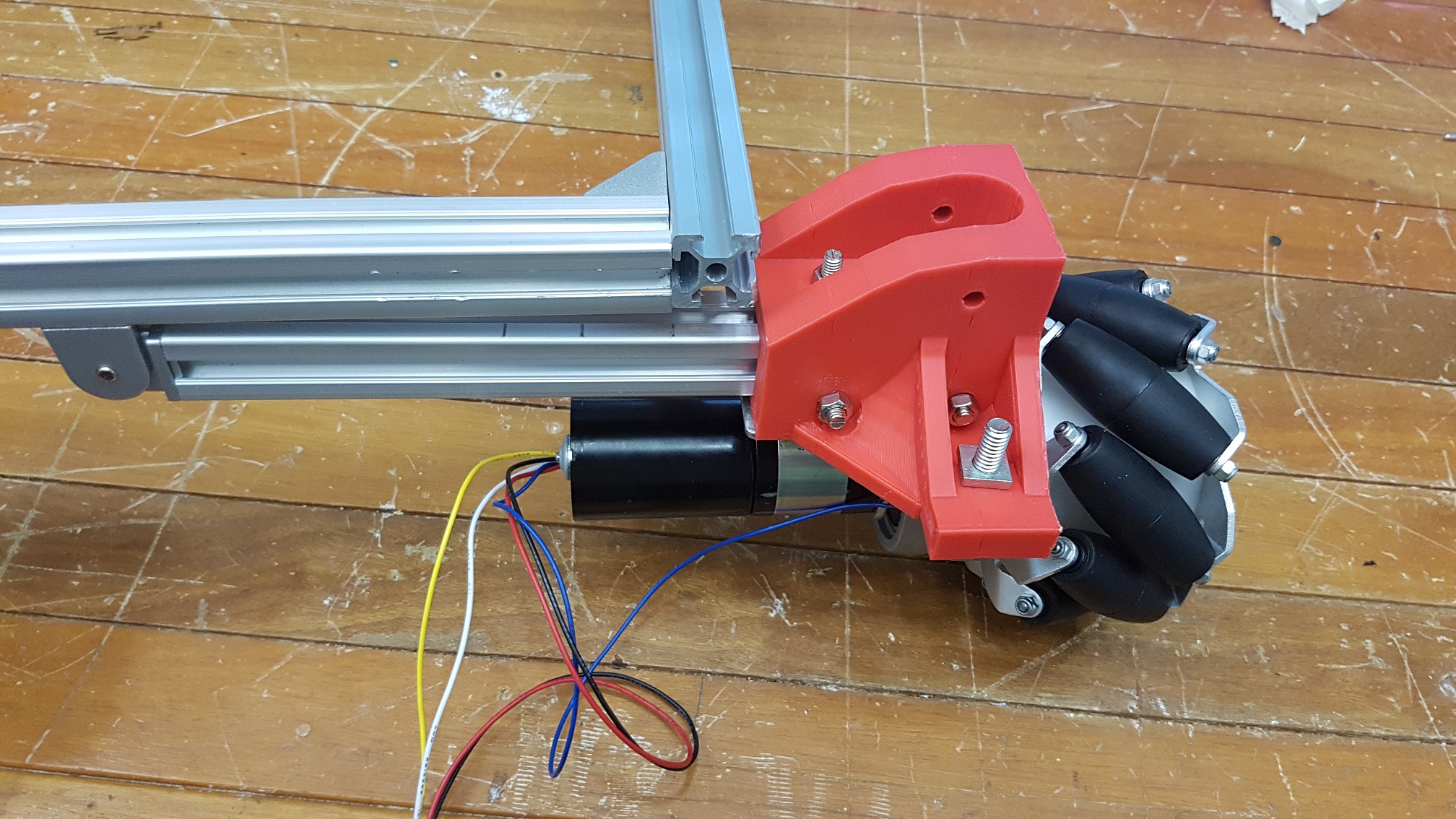
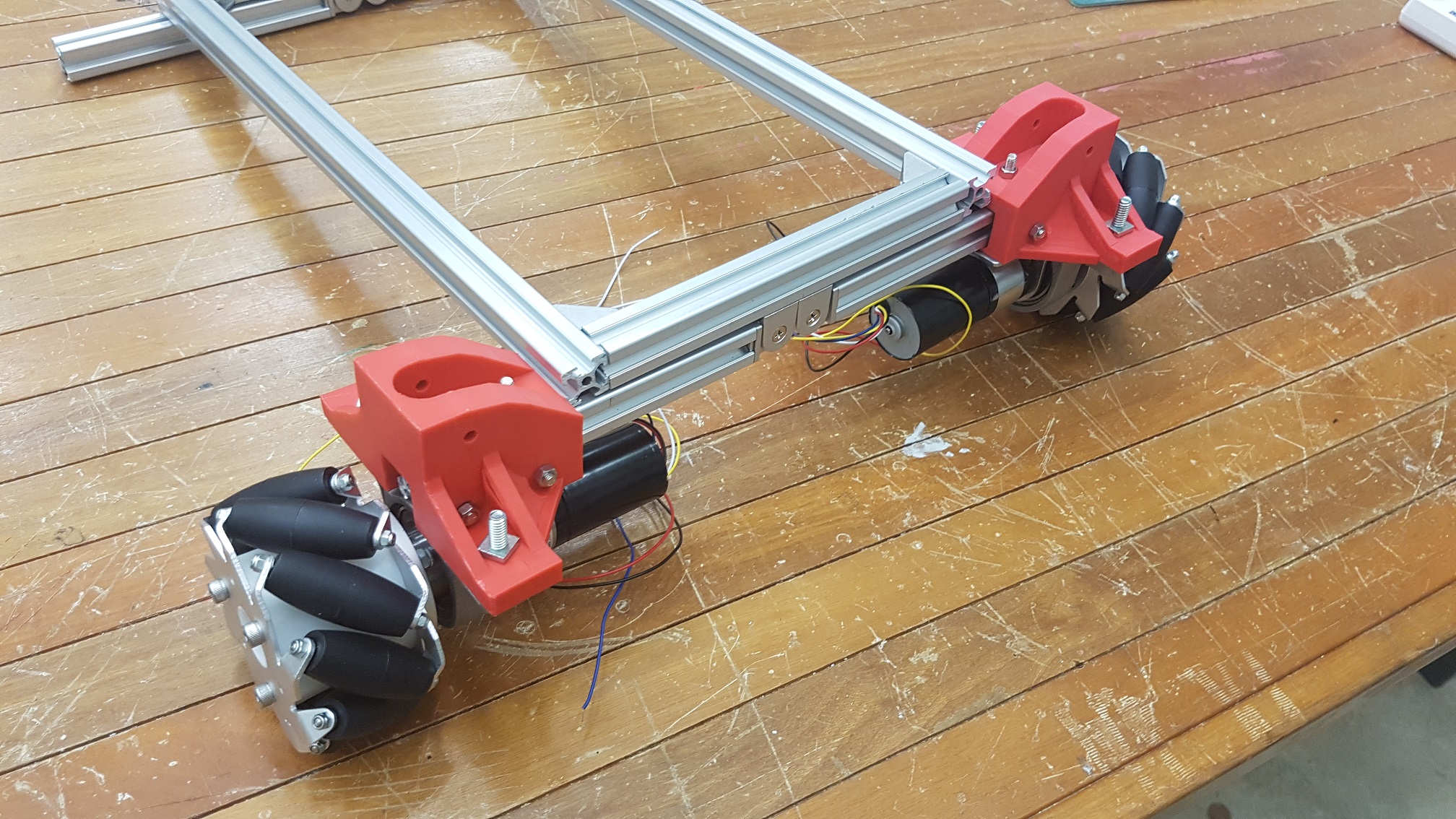
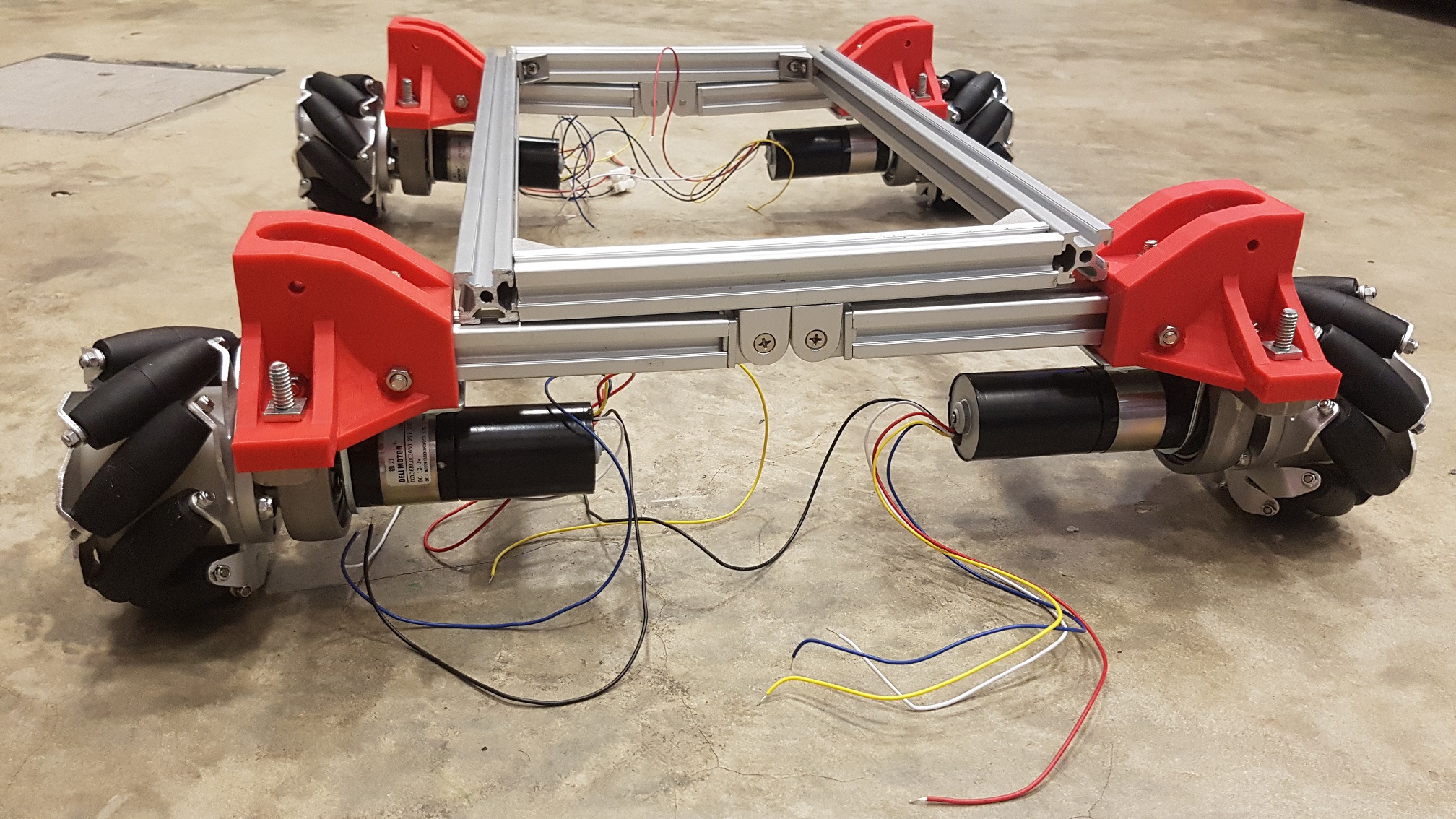
re-structure robot:
As of the previous update(the one before the presentation) whereby I’ve construct the wheel and the base structure for the robot, I’ve noticed that the parts get looser and looser even when I tighten all nut and bolt in every connections, that was because of the vibration when i move the structure around. To counter this problem, I’ve dissemble the structure and change all bolt and nuts to self-tighten nuts (Nyloc nut) paired with a spring washer to reduce the rate of it getting loose overtime. As a loose part will get looser overtime through vibration, if this was not done at the early phase(now), it will be a real hassle at the end as I want the robot to have a relative fast parts replacement (so no joints should be joined with permanent solution like super glue) and this solution of the combination of spring washer and Nyloc nut is the most effective solution for its cost(time and money).
Nyloc Nut, to “lock ” the nut prevent slippage of the nut:

Spring washer, to prevent loosening through vibration

LED matrix animation:
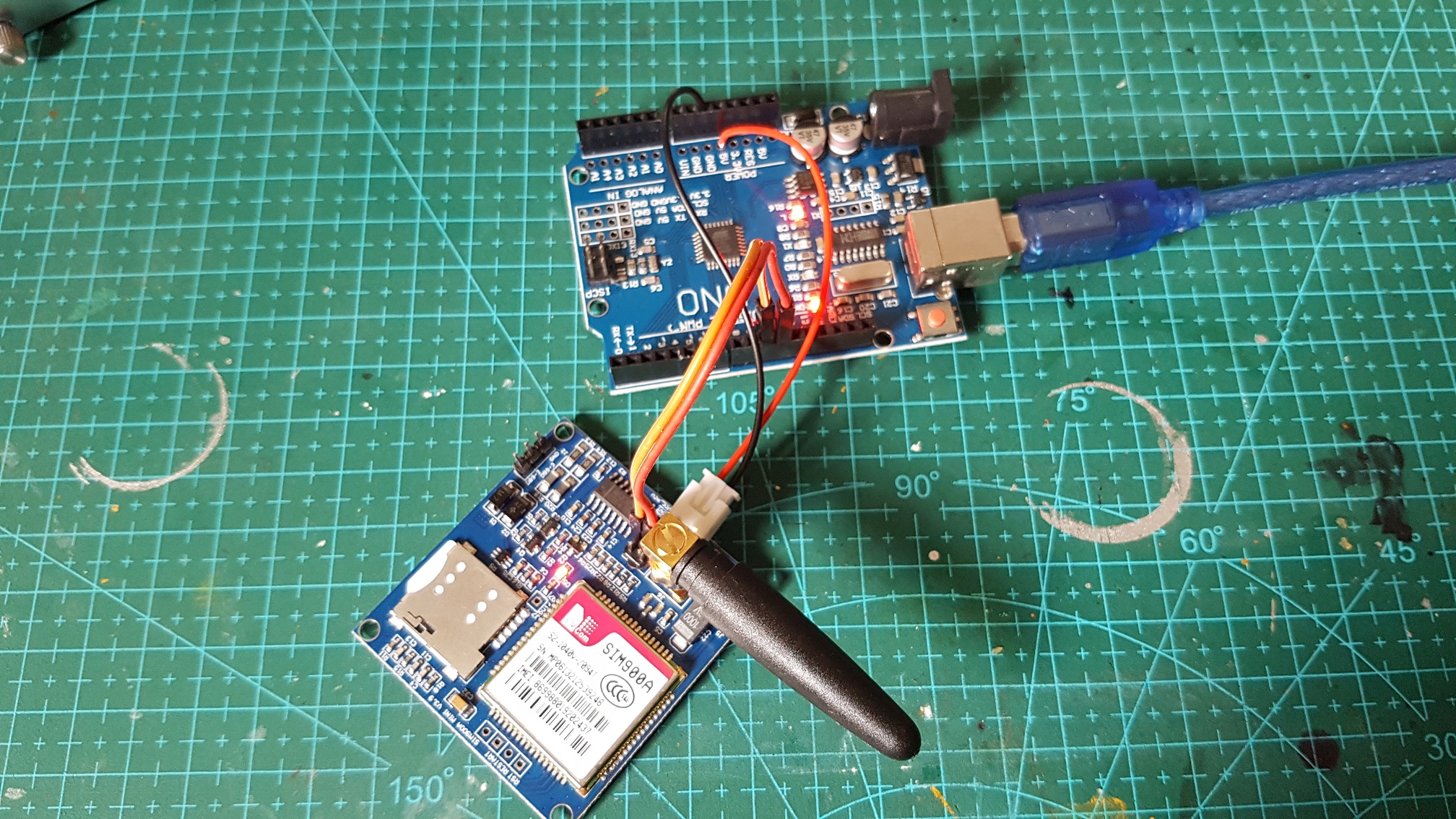
The LED Matrix used is 4 x 1088 8 by 8 LED matrix which will be used as the animation for the eye of the robot, it will be attached to an arduino Nano which will be labeled as “Emotion Processing Unit” in this project to give it a more developed feeling to bring it away from the “Arduino = prototype” perception.
Parola Library code: Robot eye library code:
Robot eye library code: animation made through a program that convert animation to LED matrix codes:
animation made through a program that convert animation to LED matrix codes: 
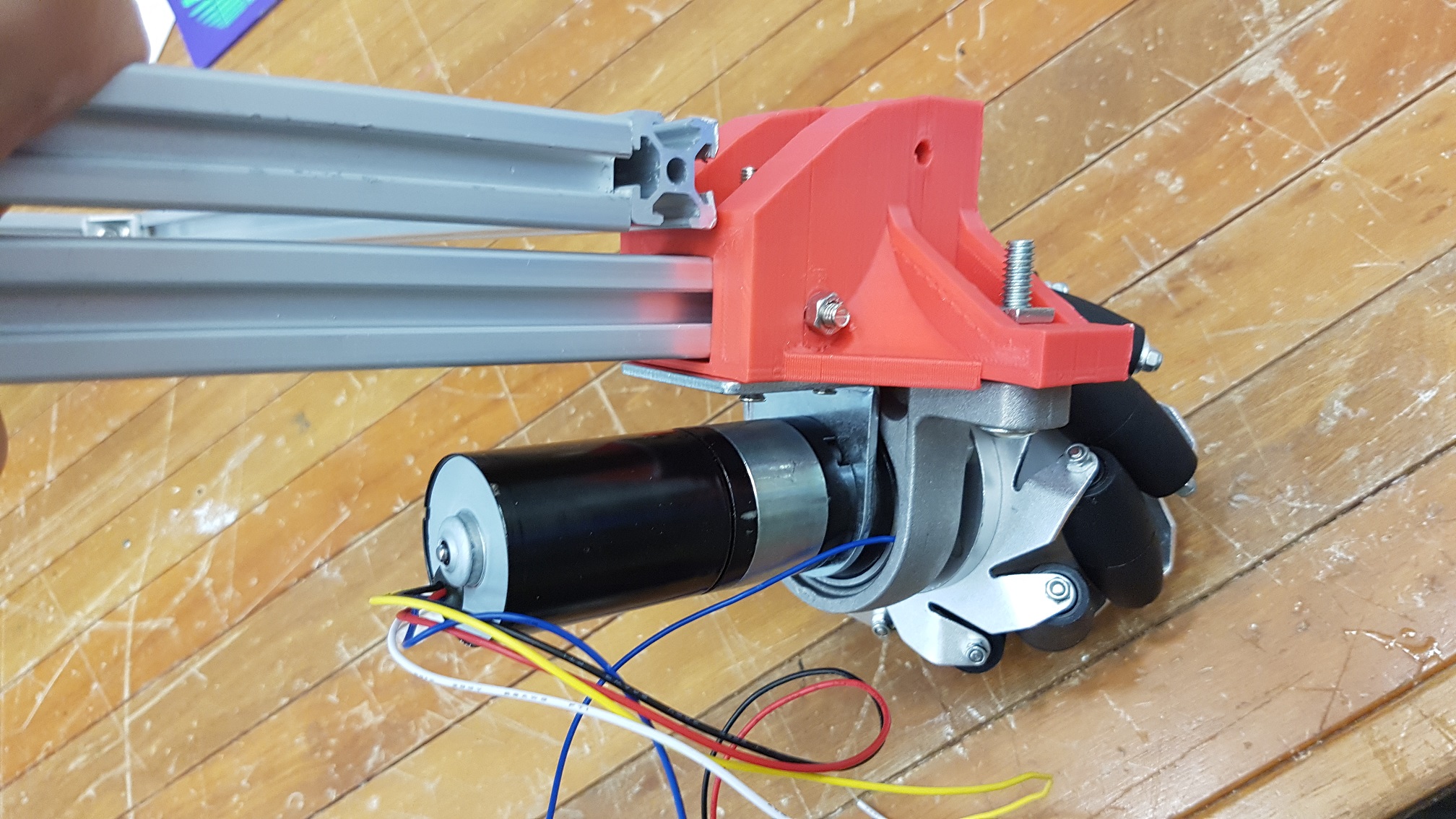
Mecanum wheel coding:
The Mecanum wheel is controlled through a 5 wire motor(VCC,GND,PWM,Dir and FG wire) so the motor driver was not required and I could wire them directly to an arduino. all the code was stored and run through an Arduino Uno whereby the main switch to control the motors were linked to a relay for the motor circuit. As mecanum wheel move unlike a normal wheel, special codes were used to move the robot in any direction without changing the orientation.

Master-Slave Arduino System
There is a function of Arduino that is called the master and slave relationship, whereby a master arduino could communicate with other arduinos(up to 52) through just two analog pin (A4 and A5), this is really helpful for my robot as there was the saying of “Do not put all the egg in a basket” and this function will ease my repair if any parts gets faulty during the FYP show, I could just switch out the problematic parts without re-wiring the WHOLE 5 bazillion wire connections. Also, Arduino is a single thread micro-controller(it can only do one task at a single moment) so by splitting up different processing requirement into different arduino, I could run multiple thread without any lags between them. Finally for the upside of a Master-slave system, it is simply to solve the problem of hardware problem of the limited digital pins each arduino have(more arduino = more pins I could utilize without having more parts/coding like using a I2C Address chip.
wiring diagram
Things are getting technical here…
The Wiring Diagram, as messy as it looks but in normal language, a Master Arduino is controlled by a clickable analog stick (mode 1 to move, mode 2 to rotate), the data is processed and sent over through Analog Pin 4 & 5 to the MPU and EPU which “Movement Processing Unit(MPU)” that controls all the movements of the motor and “Emotion Processing Unit(EPU) controls the eye Animation on the LED Matrix. All of the Arduinos and motors will be paralleled connected to the 12V battery supply to power them up.
O.U.R.S Chief Engineer at work:

Sample Movement of Explorer 27:










 added a simple(sample) animation with the standard UI, buttons and back buttons work fine,(the actual animation is much smoother, but the GIF is slow)
added a simple(sample) animation with the standard UI, buttons and back buttons work fine,(the actual animation is much smoother, but the GIF is slow) The arduino code was written in a way that it gives multiple values in a < > bracket as start and end marker, so that it could be changed to spin the motor and sms the student through arduino in the future, example of the serial communication <255,255,255,255,(phoneNumber),(UsersMessage)>
The arduino code was written in a way that it gives multiple values in a < > bracket as start and end marker, so that it could be changed to spin the motor and sms the student through arduino in the future, example of the serial communication <255,255,255,255,(phoneNumber),(UsersMessage)> This is a 11 inch screen with HDIM driver with a separate touchpanel, however the seller sent me the wrong usb wire so I cant test the touchscreen before they replace it, however the screen works well! although it is abit small, but it is good for my budget and power issue (my robot will run with internal battery so every component used in it must have their power consumption taken into consideration before everything.)
This is a 11 inch screen with HDIM driver with a separate touchpanel, however the seller sent me the wrong usb wire so I cant test the touchscreen before they replace it, however the screen works well! although it is abit small, but it is good for my budget and power issue (my robot will run with internal battery so every component used in it must have their power consumption taken into consideration before everything.)  The largest single component in the robot will be the laptop which will be used to run the calculations within the robot so the minimum base size will be atleast the size of my laptop (the wheels will be protruding the frame so tha actual base will be about 15cm wider) I’ve cut the profile to form 47cm by 40cm(+~15cm for wheels) currently and I might make changes along the way.
The largest single component in the robot will be the laptop which will be used to run the calculations within the robot so the minimum base size will be atleast the size of my laptop (the wheels will be protruding the frame so tha actual base will be about 15cm wider) I’ve cut the profile to form 47cm by 40cm(+~15cm for wheels) currently and I might make changes along the way.


 Of course I had no expectation to have something that I could use as a final, but it would be really cool if I can see a work created specially for my project… and I gave a super vague brief to the artist on purpose because I just wanted to see what kind of weird ideas I could get, and if there are any ideas good enough, I will just adopt into my robot!
Of course I had no expectation to have something that I could use as a final, but it would be really cool if I can see a work created specially for my project… and I gave a super vague brief to the artist on purpose because I just wanted to see what kind of weird ideas I could get, and if there are any ideas good enough, I will just adopt into my robot!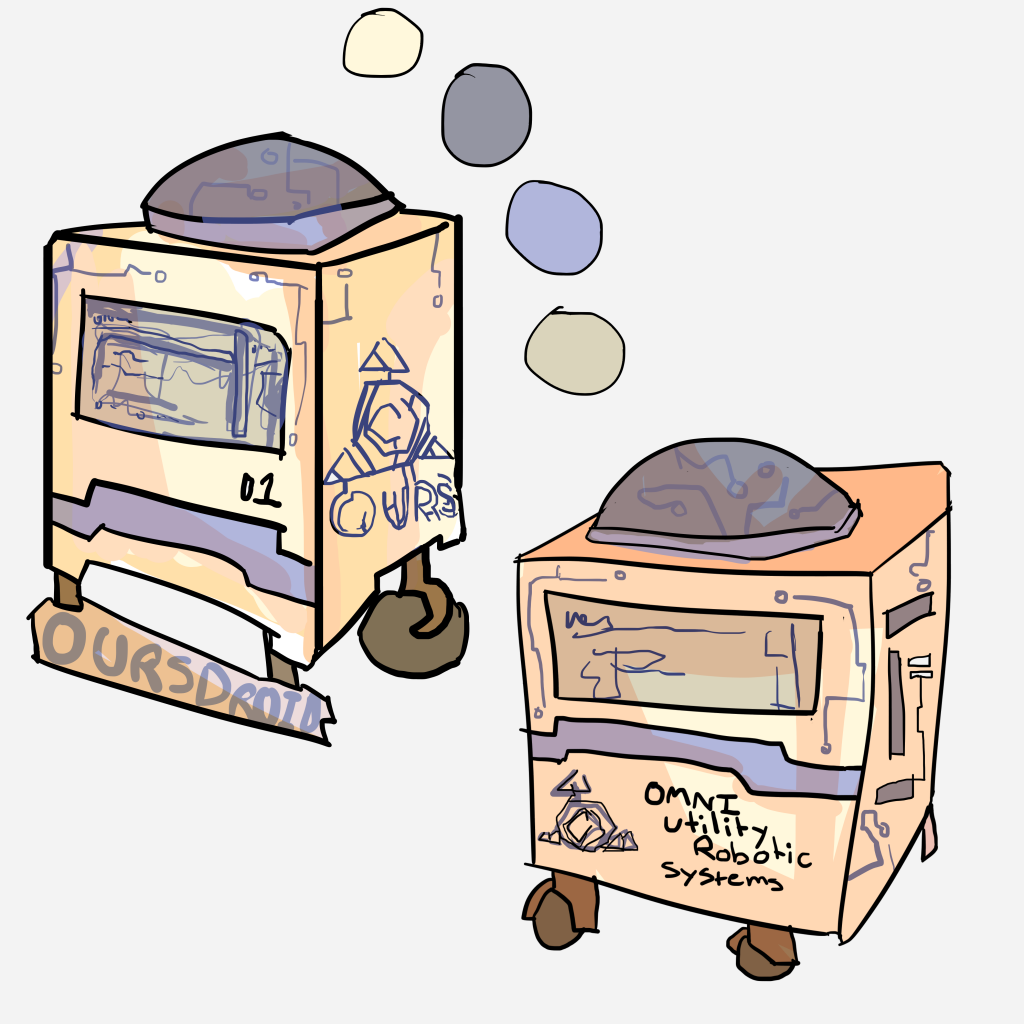


 The Gundam outside Odaiba, Tokyo, I really like the styling of Gundams.
The Gundam outside Odaiba, Tokyo, I really like the styling of Gundams. This is the The National Museum of Emerging Science and Innovation (Miraikan) of Tokyo.
This is the The National Museum of Emerging Science and Innovation (Miraikan) of Tokyo. the iconic location of Miraikan, i am amazed by the scale of it.
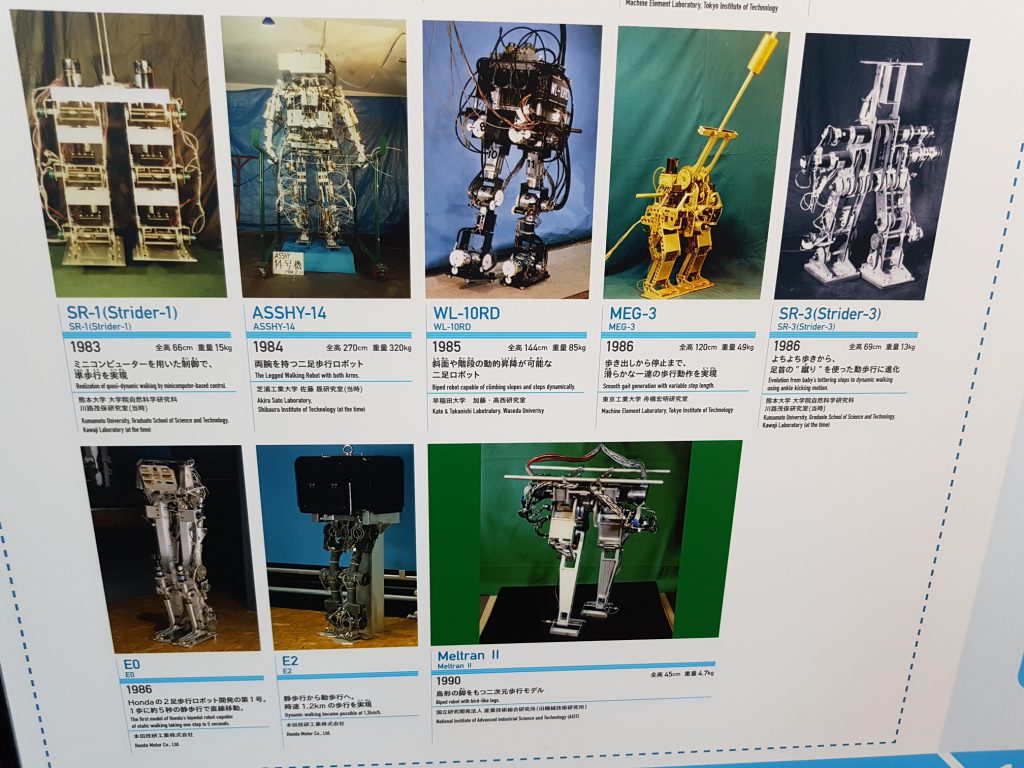
the iconic location of Miraikan, i am amazed by the scale of it. Upon entering the Museum, I was greeted by one of the robots, its really cool to see the “undressed” robot so that i can take a look at the constructions and the system they were using. cool stuffs!
Upon entering the Museum, I was greeted by one of the robots, its really cool to see the “undressed” robot so that i can take a look at the constructions and the system they were using. cool stuffs! this personal vehicle was made by Honda which could carry the person, much like an hoverboard but the sitting version, the visitor could try it buy i missed this activity if not i would really love to try one.
this personal vehicle was made by Honda which could carry the person, much like an hoverboard but the sitting version, the visitor could try it buy i missed this activity if not i would really love to try one. The main purpose I went to Miraikan, to see the famous Asimo, its really cute and i love the astronaut-styling it has. i must say it was really well made and it can dance and kick a ball, although they are pre-programmed, its still inspiring nontheless.
The main purpose I went to Miraikan, to see the famous Asimo, its really cute and i love the astronaut-styling it has. i must say it was really well made and it can dance and kick a ball, although they are pre-programmed, its still inspiring nontheless. there was this touch screen which display the details of the globe over there and explain the stuffs on it, since I am also using UI in my robot, this was the futuristic style I had in mind, black background with bluish outline that has the advanced feel to it.
there was this touch screen which display the details of the globe over there and explain the stuffs on it, since I am also using UI in my robot, this was the futuristic style I had in mind, black background with bluish outline that has the advanced feel to it.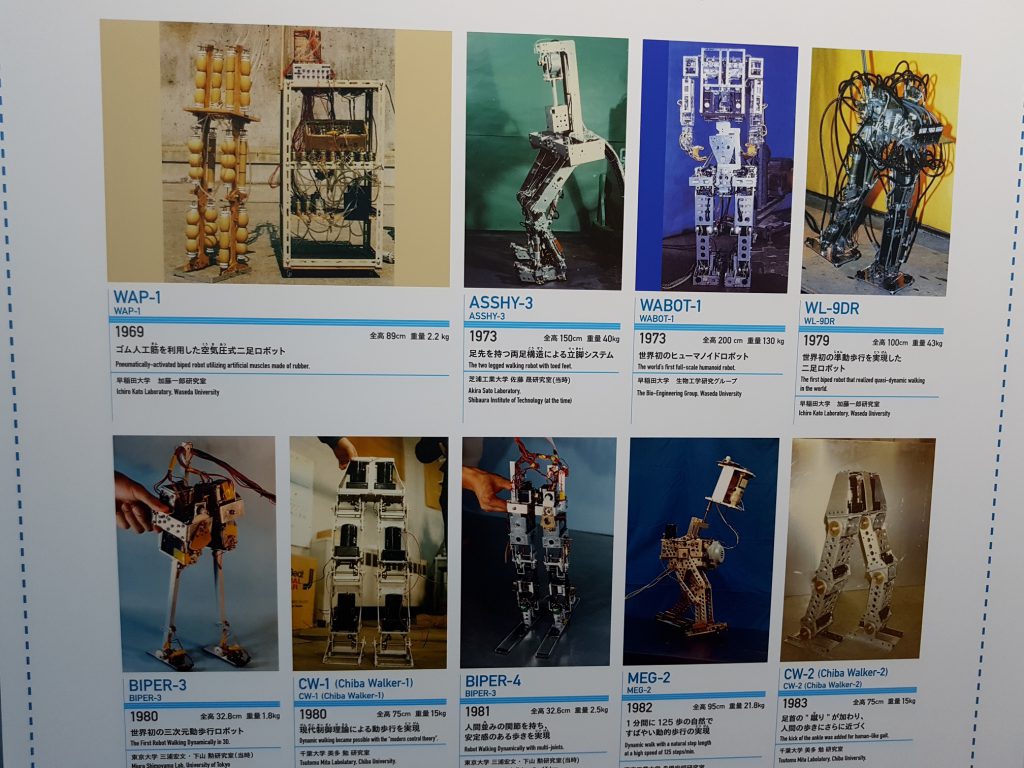


 Internal of Miraikan.
Internal of Miraikan. and I really like Asimo so i bought one figurine which was rather expensive but it will work as a exhibit for my FYP booth.
and I really like Asimo so i bought one figurine which was rather expensive but it will work as a exhibit for my FYP booth. this is a gif, click to play
this is a gif, click to play
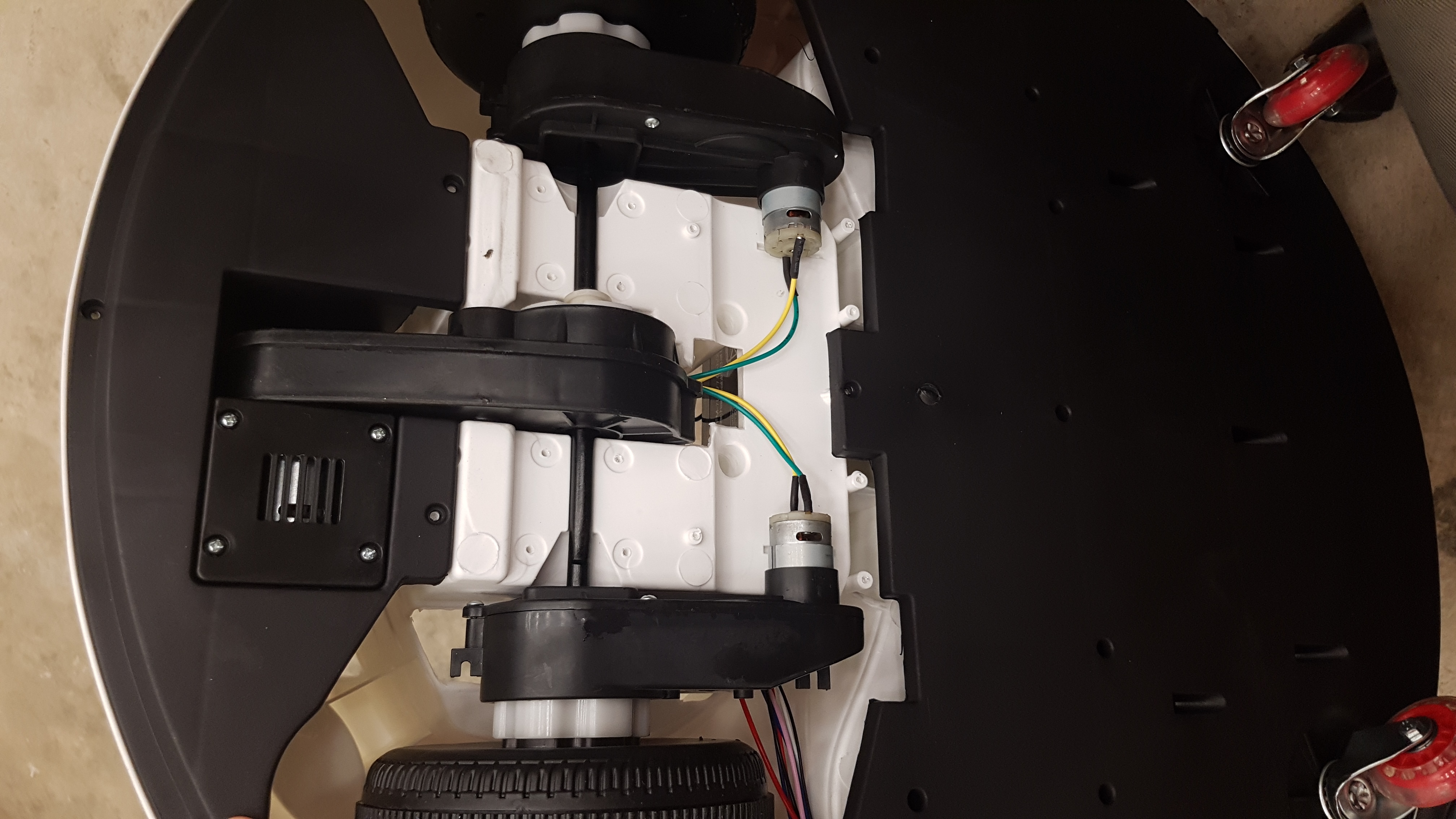
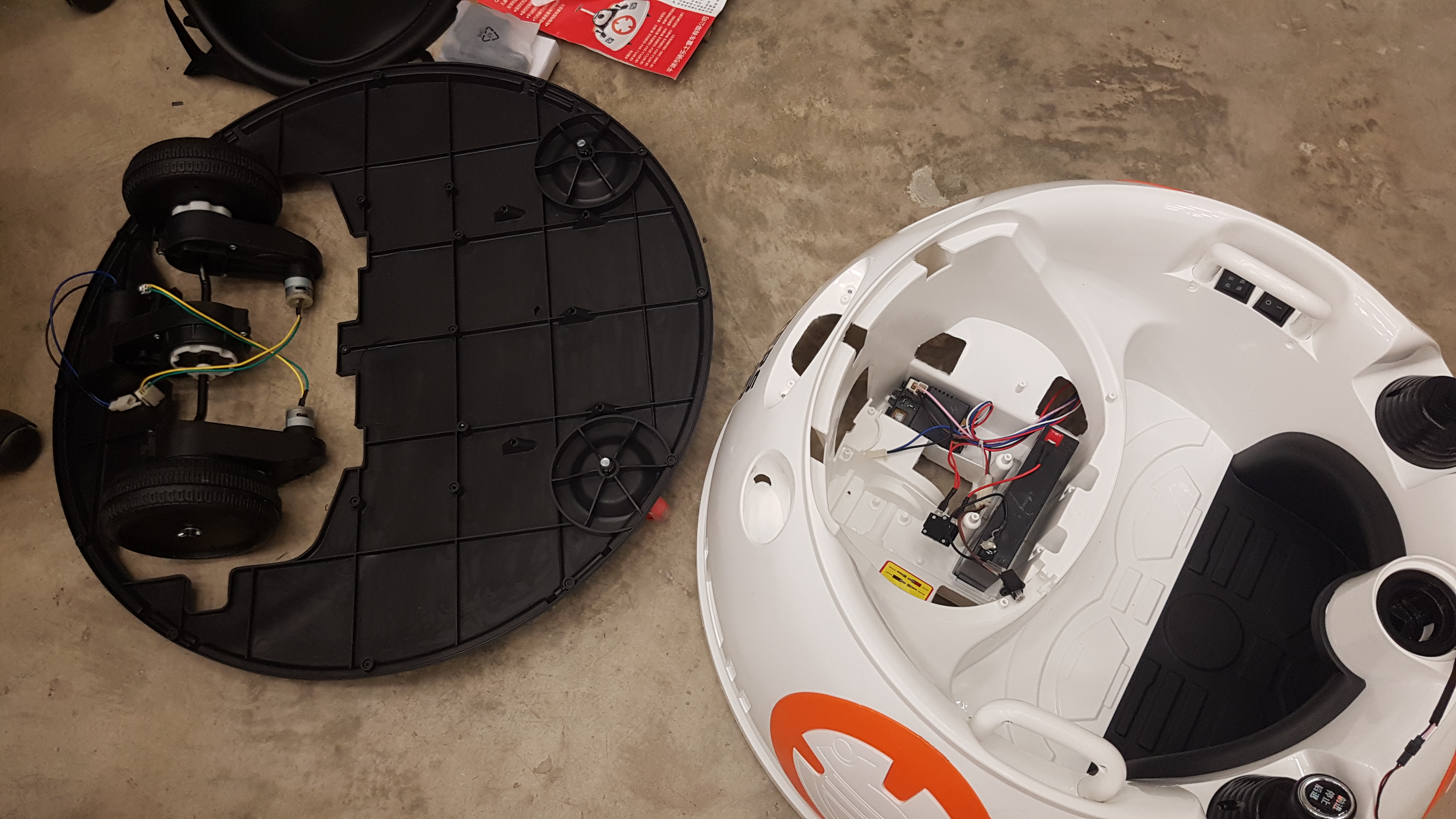
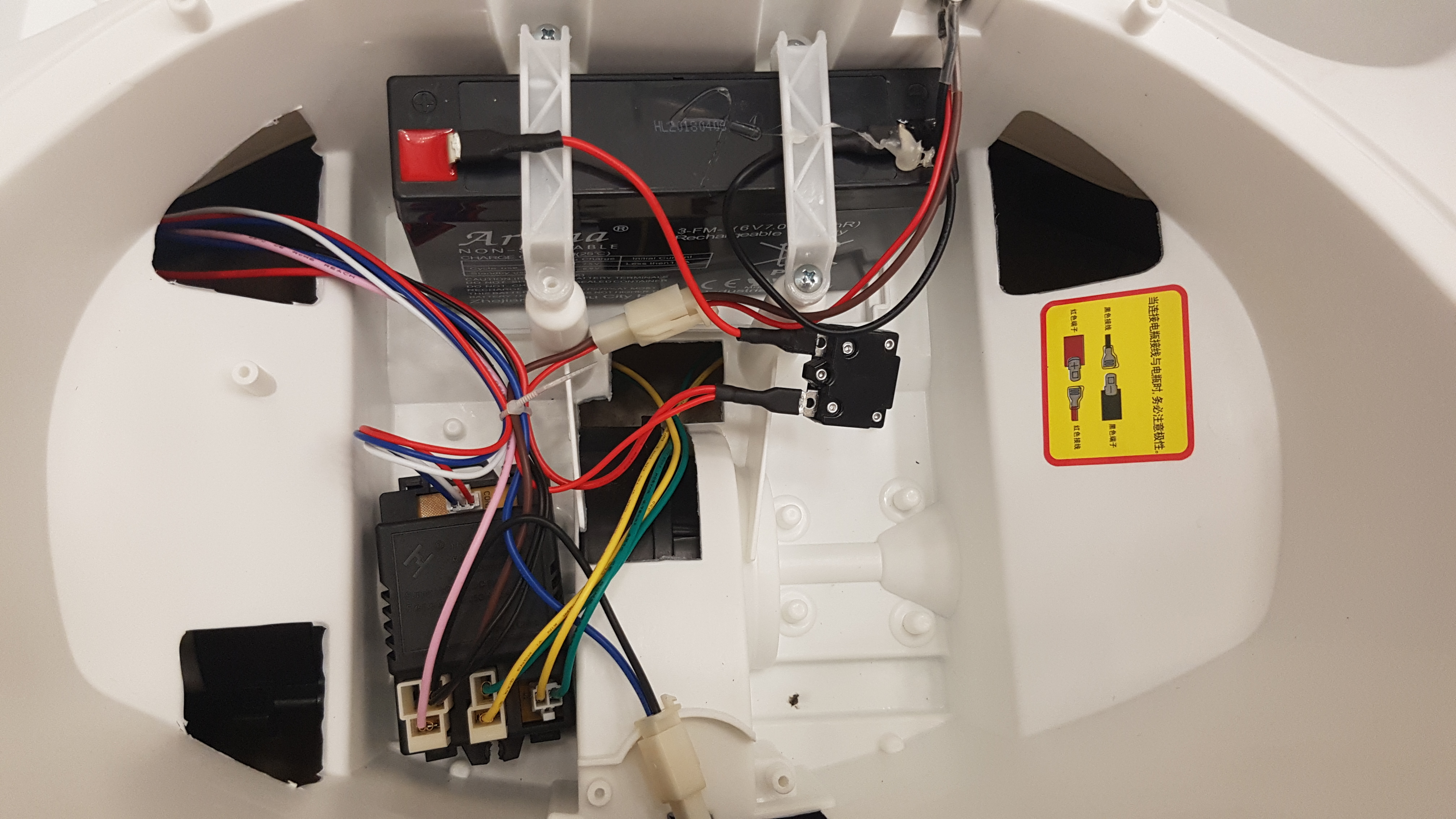
 Remote Controlled Children vehicle, it can take up to 30KG hence I bought this to use it as a base since it will be able to carry all the components.
Remote Controlled Children vehicle, it can take up to 30KG hence I bought this to use it as a base since it will be able to carry all the components.