
Continue from my previous Process 2.
again, I had progressed much further since that post, mainly in designing the workable electrical and mechanical system that could fit into the Telephone and to write the Arduino code up.
First, lets start with the Final Video!
Back into the Process
Since the previous post which I’ve roughly did the belt system that drives the music card into the laser reader, I had added the motor to the system and tried it, at this point, it seemed to work as I thought all I need was to slow the motor down and it will be alright.

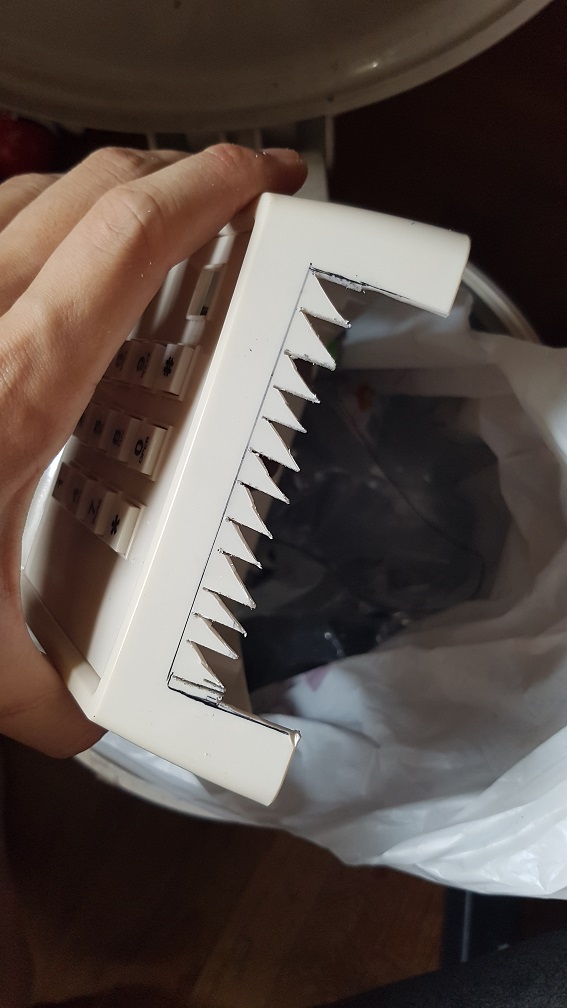

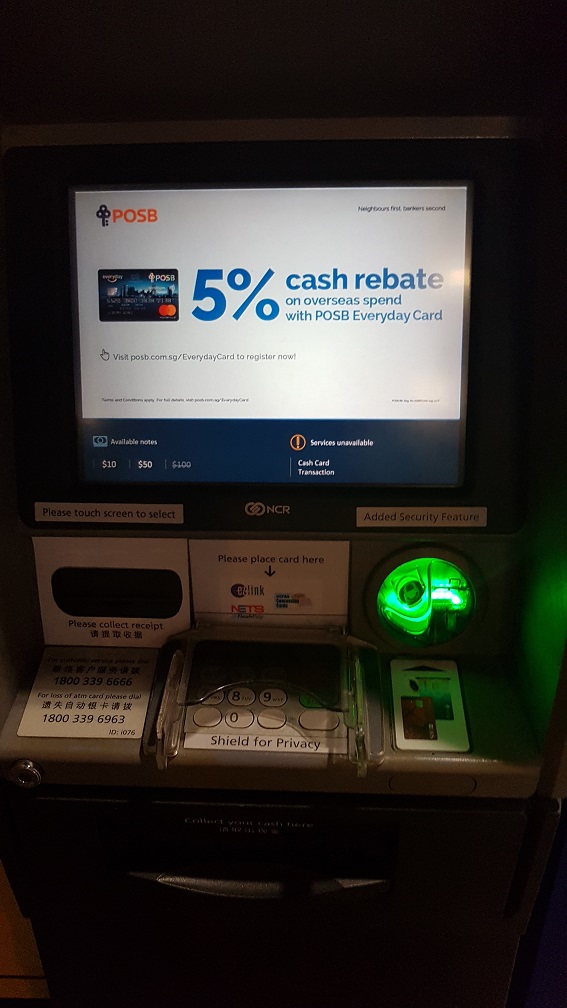
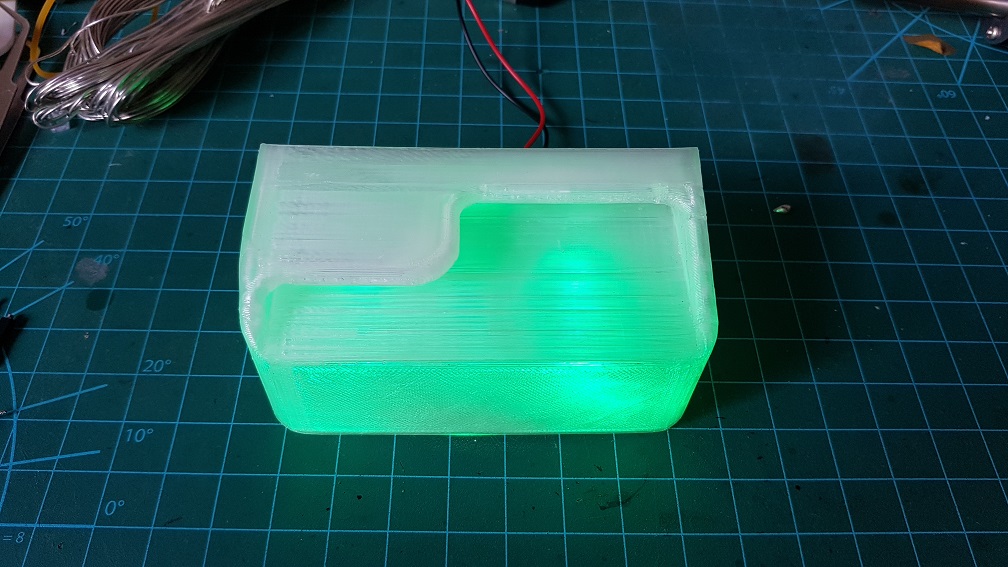
After I cut the hole, I proceed to modelling the card slot and i took inspiration from the ATM just to have the user to have something they’ve experienced and know how to put the Music Card in without instructing them, since subconsciously, I assumed that they interacted with a ATM at some point in their life.
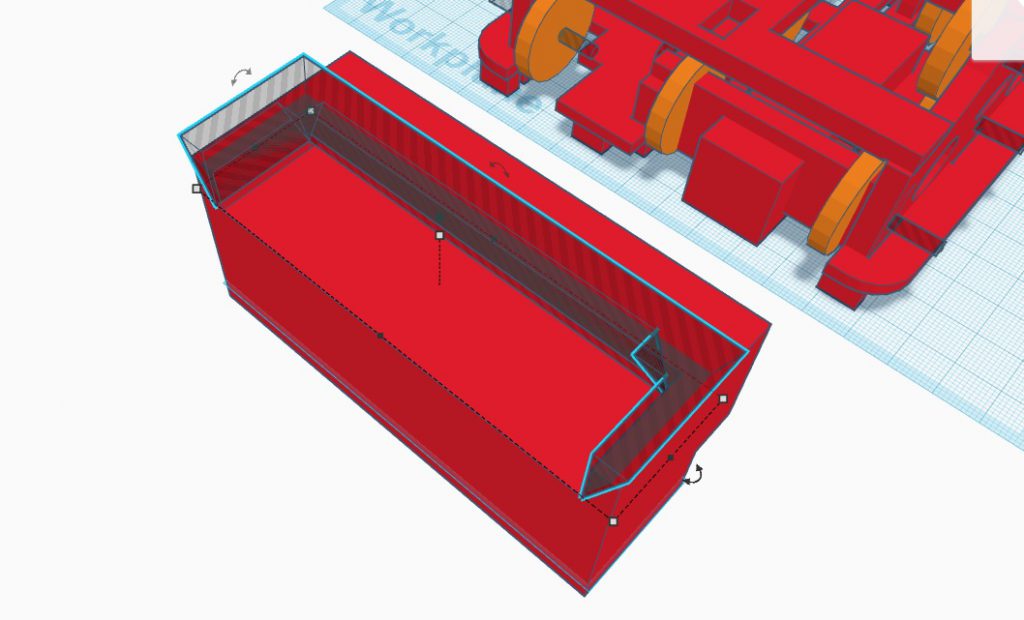

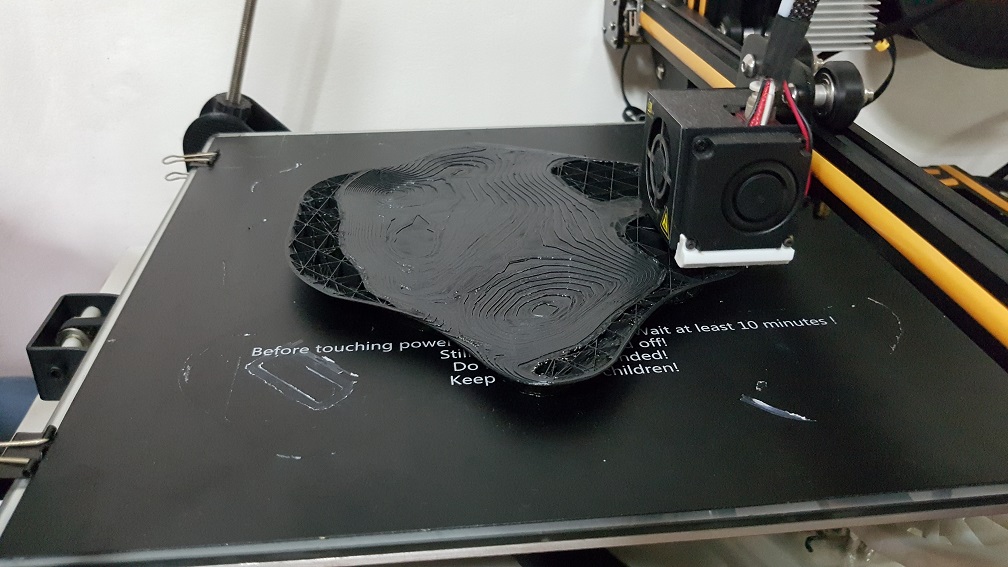
After the modelling which i am really happy with, I proceed to print it.
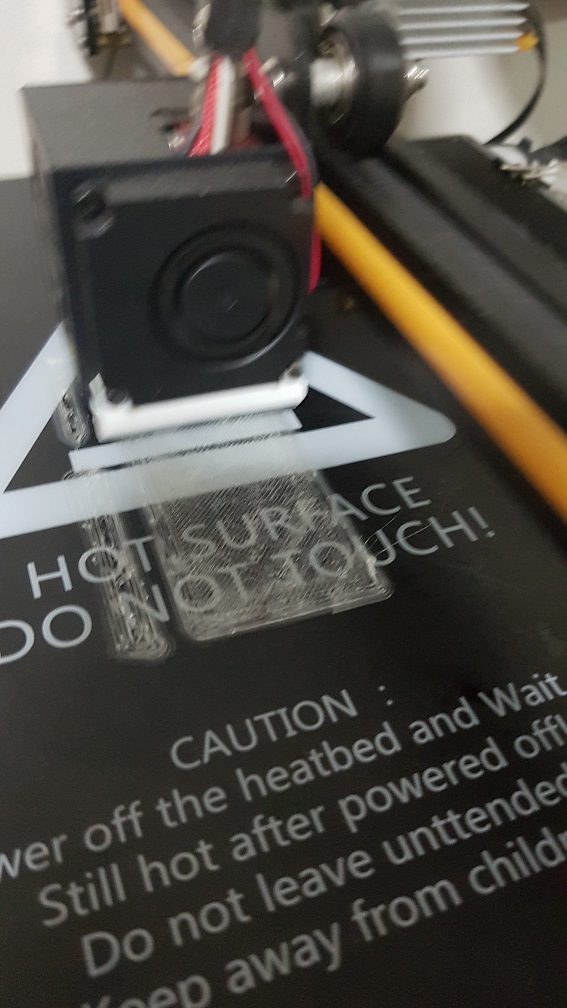
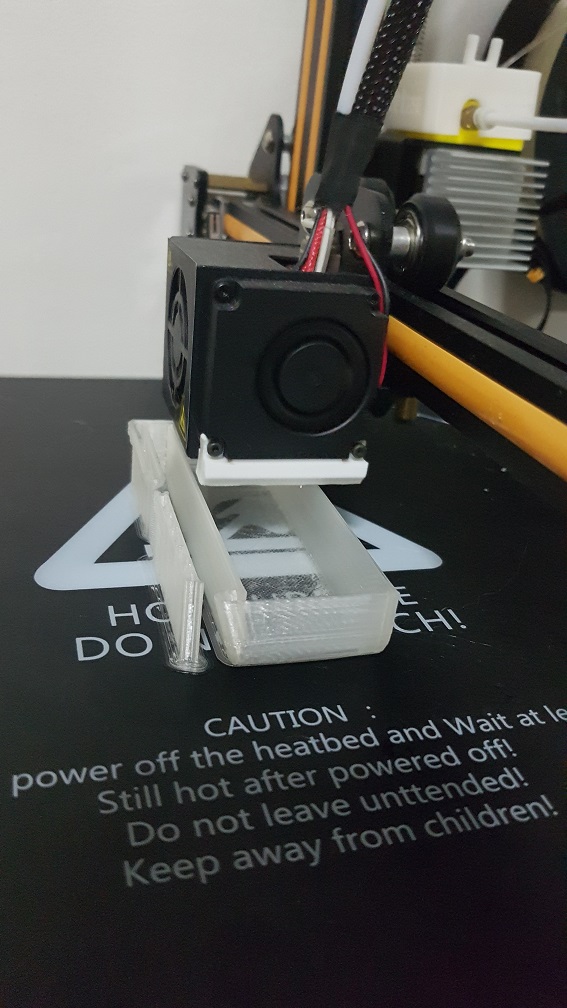


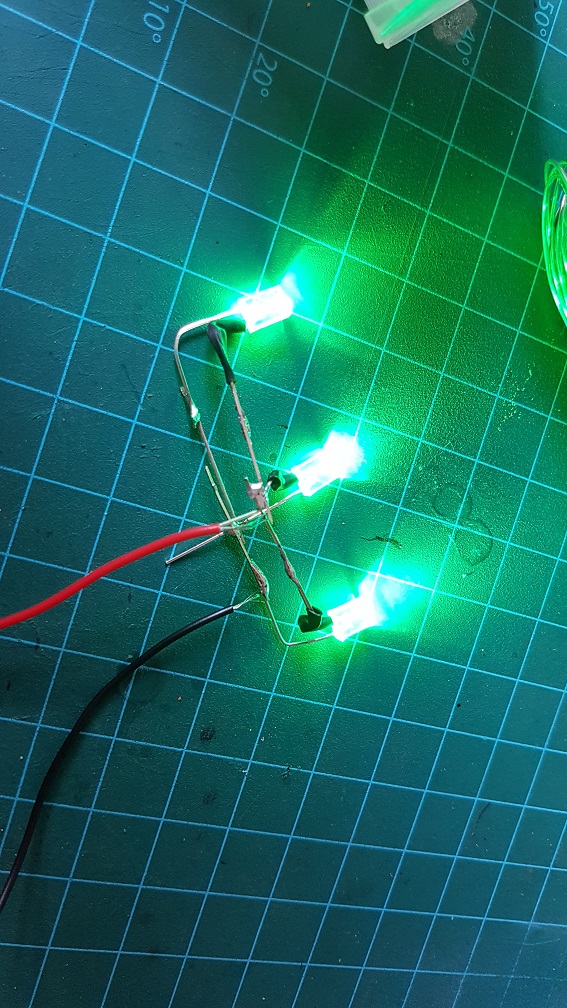
Since it was looking good, I went ahead and make a nicer LED system for it by soldering 4 LED(3 on the bottom and one for the top).


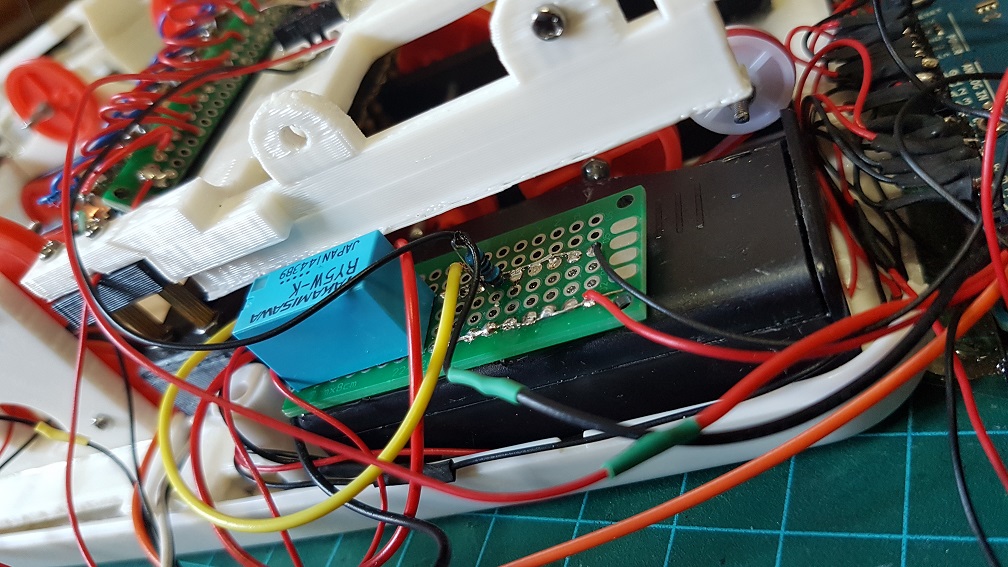
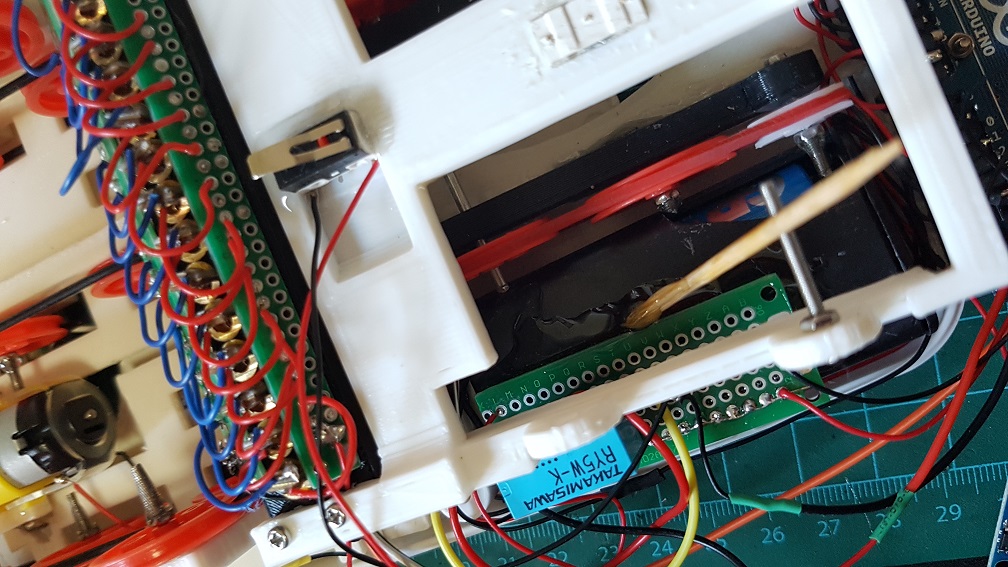
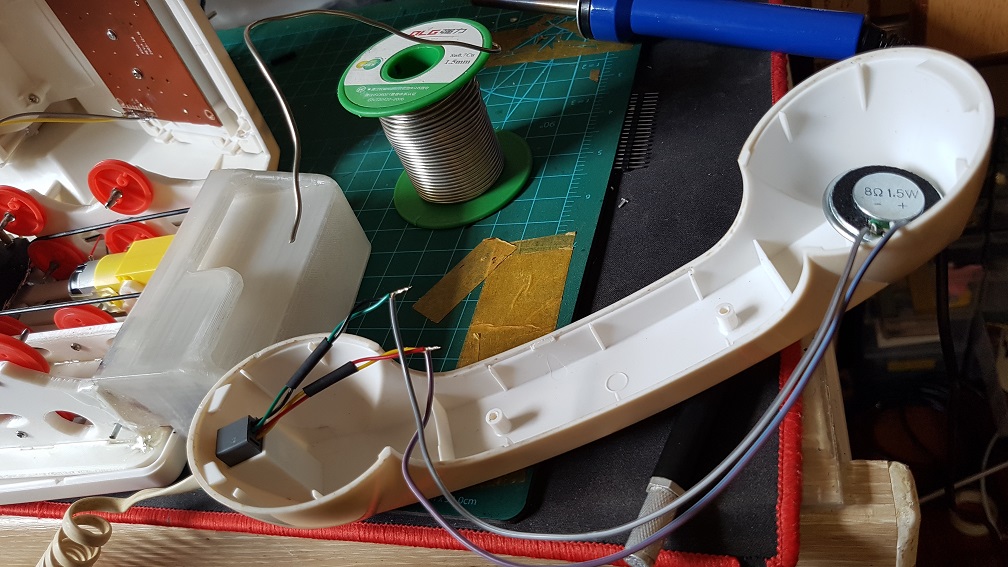
Next, I Epoxyed the speaker onto the bottom of the front belt drive since there is already a hole in the bottom shell for the speaker.
 This is a 8 Ohm 0.5watt speaker that will be plugged directly into the Arduino.
This is a 8 Ohm 0.5watt speaker that will be plugged directly into the Arduino.
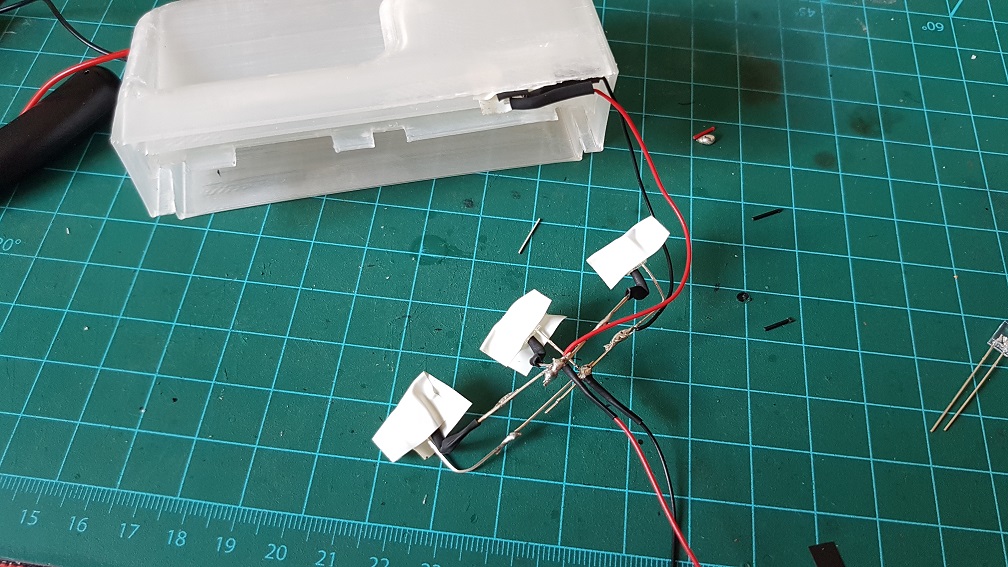
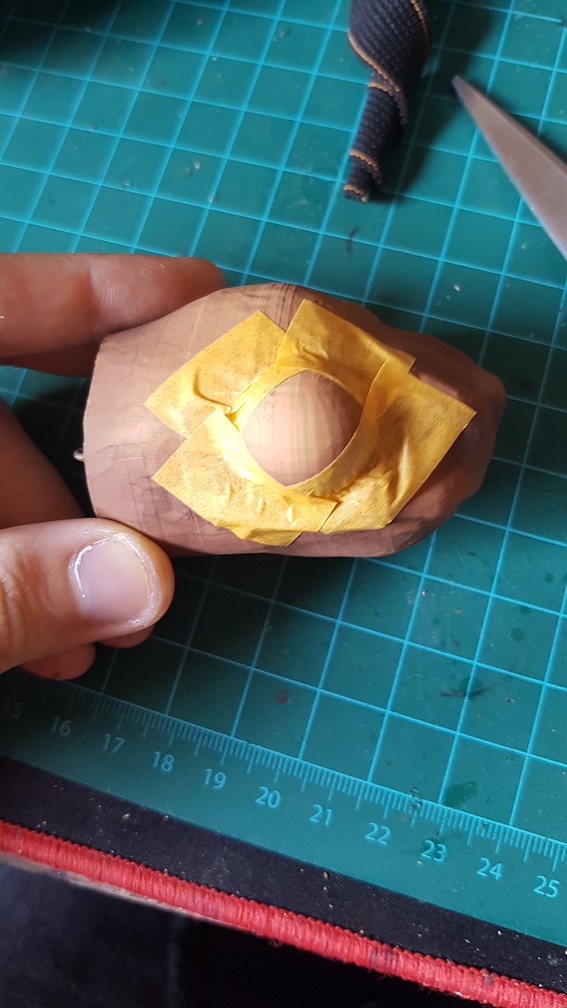
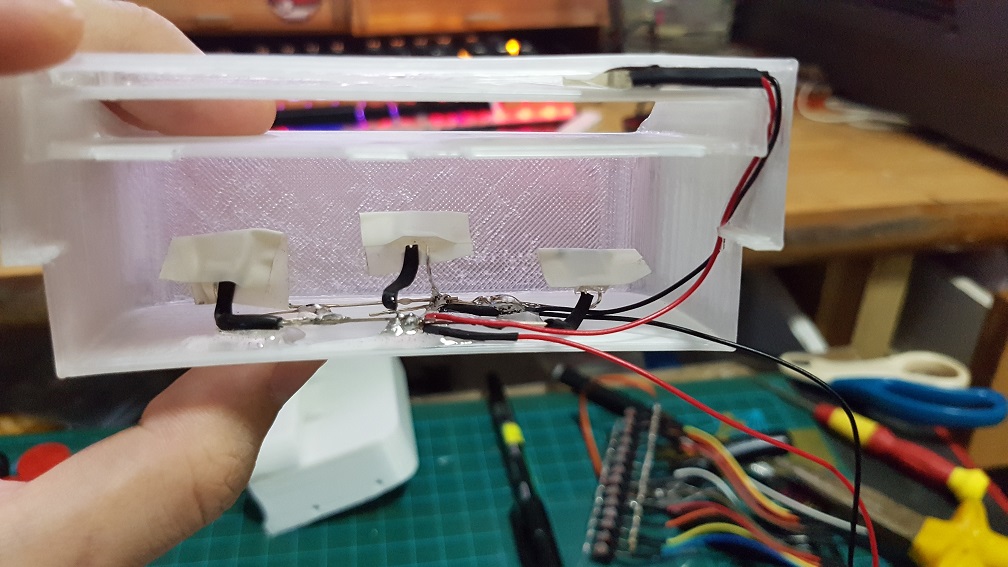 I also Epoxyed the 4 LED into the card slot to prevent them from sliding around.
I also Epoxyed the 4 LED into the card slot to prevent them from sliding around.
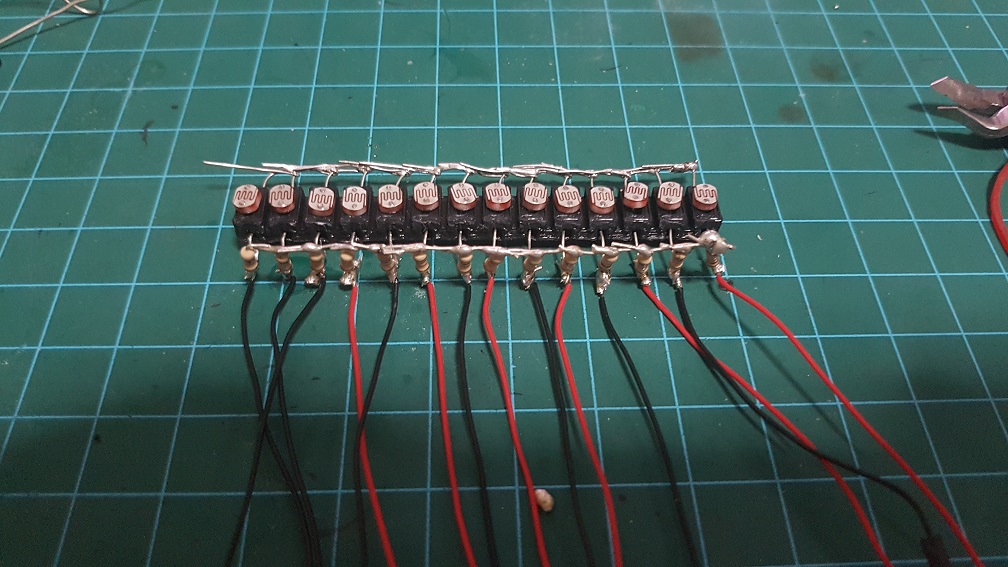
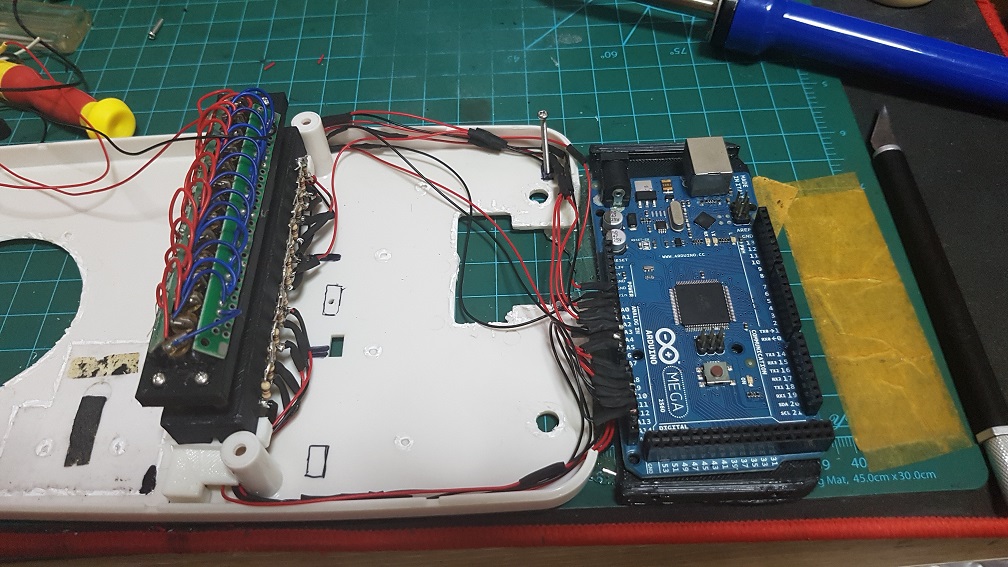
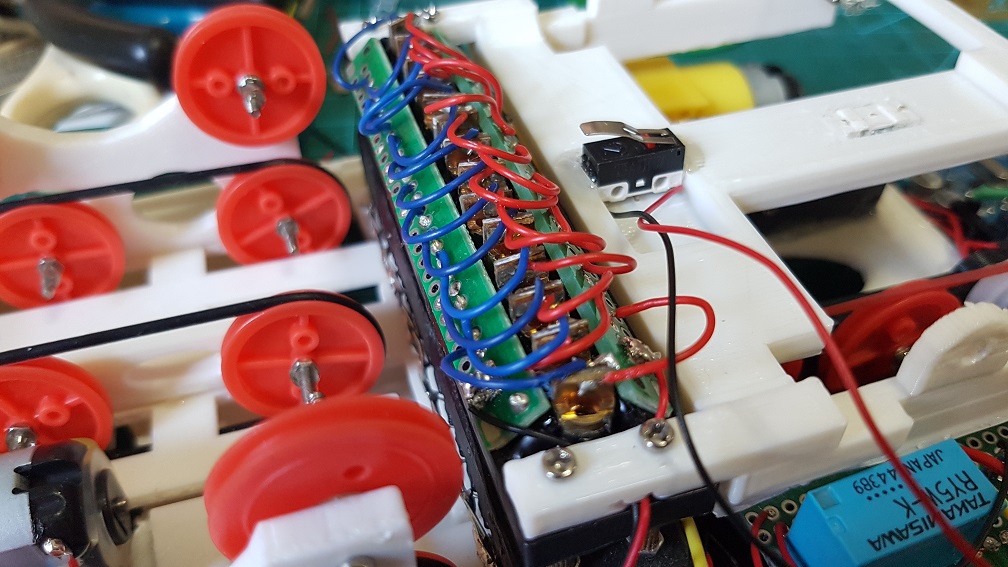
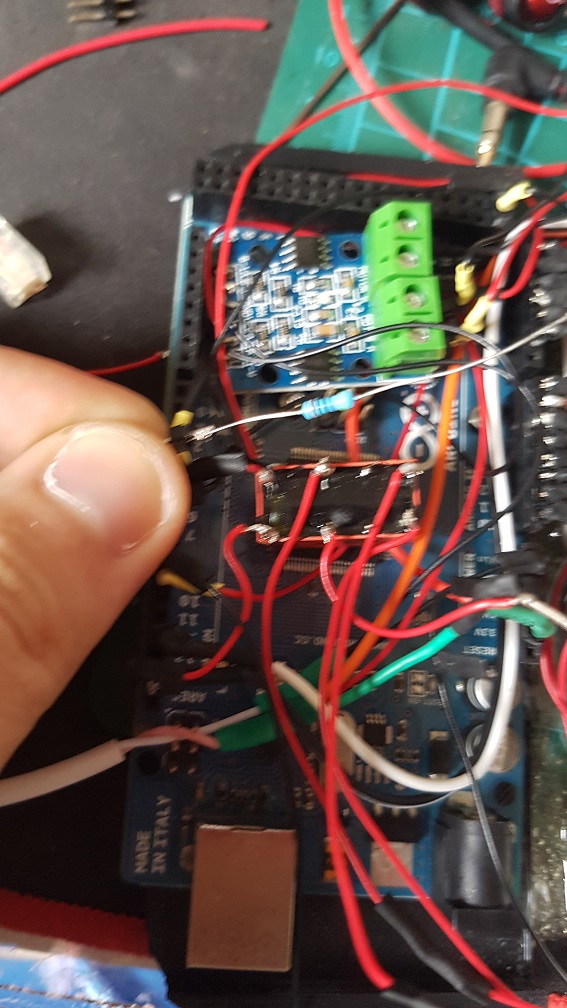
And came the soldering party.

It was at this point then I realized that if i reduce the speed of my DC motor to the speed of the music, I wont have enough torque to pull the card in..
After an afternoon of panicking and finding alternative motor or even thinking to redesigning my whole belt system….
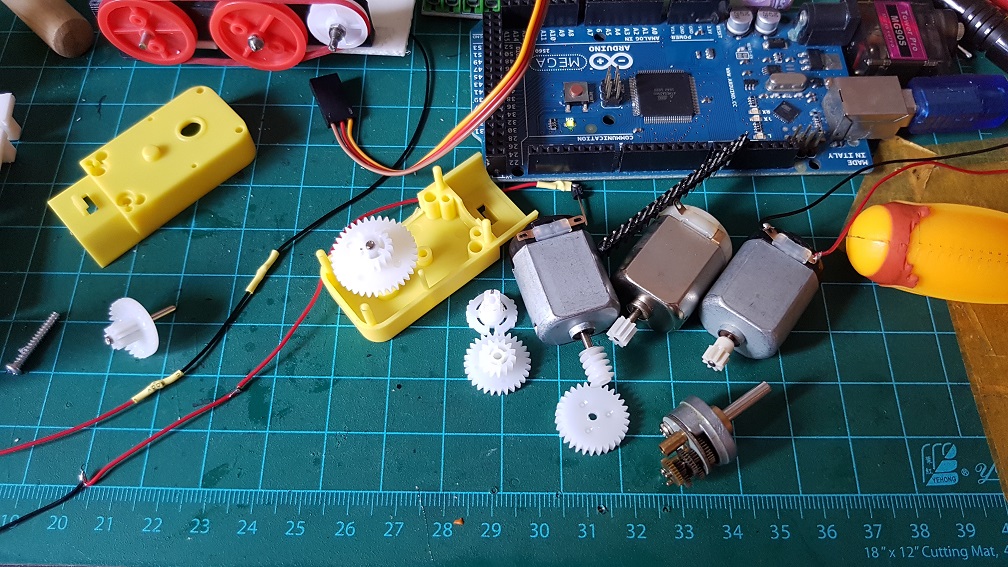
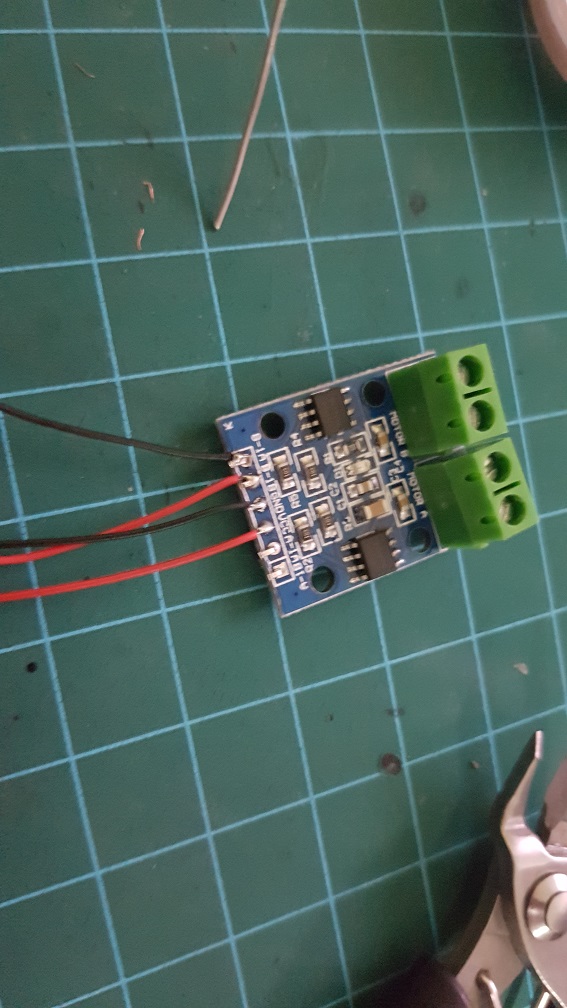
 And then I found that I have a longer DC motor with metal gears built into it and i tried to figure our if I can incorporate this gear box into my current system, which is also rather impossible as the ratio for this gear box is about 1:45. when I only need about 1:5 to 1:8. if i use this, I will have the belt driver running too slow.
And then I found that I have a longer DC motor with metal gears built into it and i tried to figure our if I can incorporate this gear box into my current system, which is also rather impossible as the ratio for this gear box is about 1:45. when I only need about 1:5 to 1:8. if i use this, I will have the belt driver running too slow. 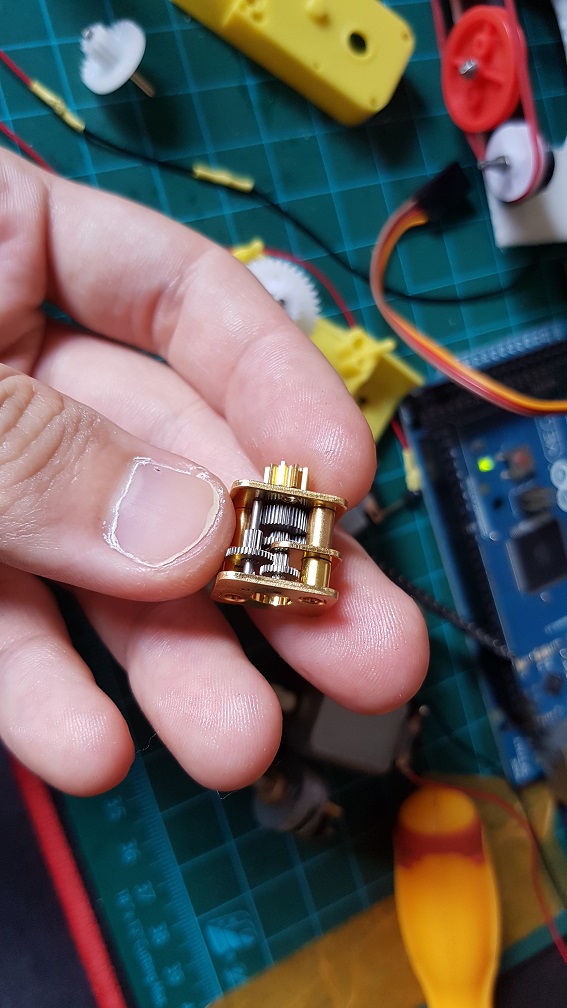 same goes for this, but this is 1:250… even slower.
same goes for this, but this is 1:250… even slower.
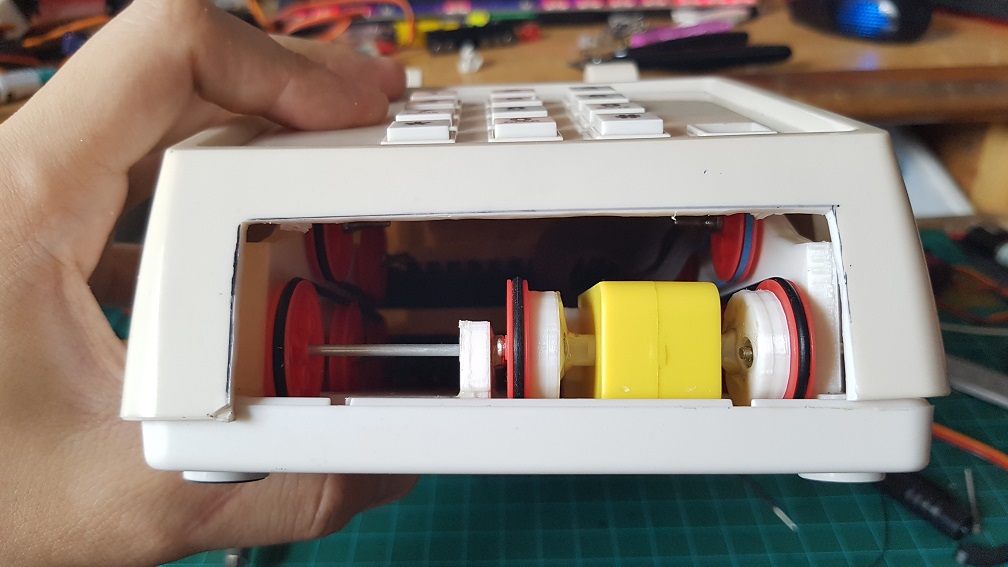
So to solve this problem, I tried to get the medium speed which is faster than what the song should be and will stuck about 30% of the time and removed the buttons (which detects card when user insert into it that trigger the motor to turn the belt.) that caused more friction. And I also jump start the motor by making it to spin at full speed for half a second to break the initial force required when the motor is starting.
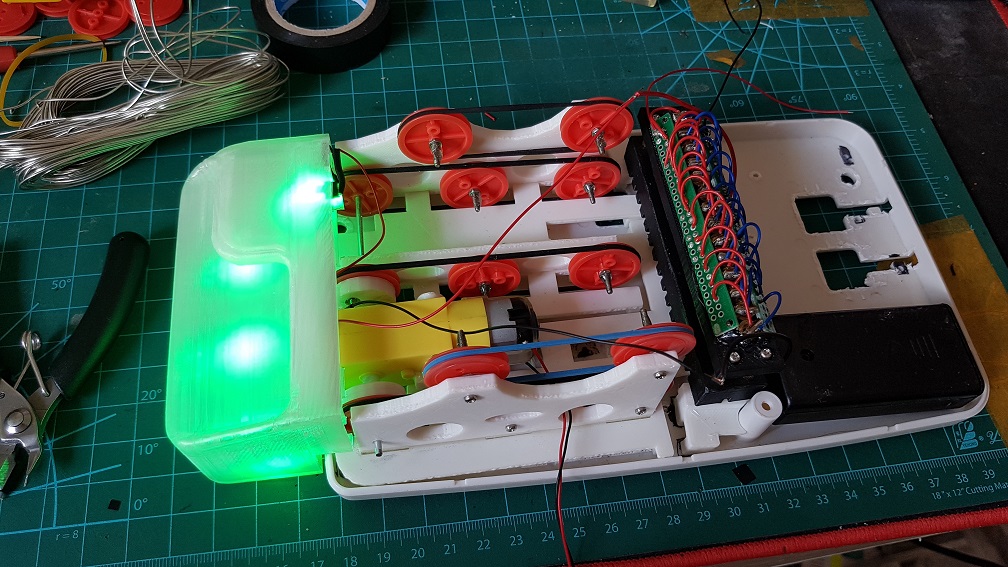
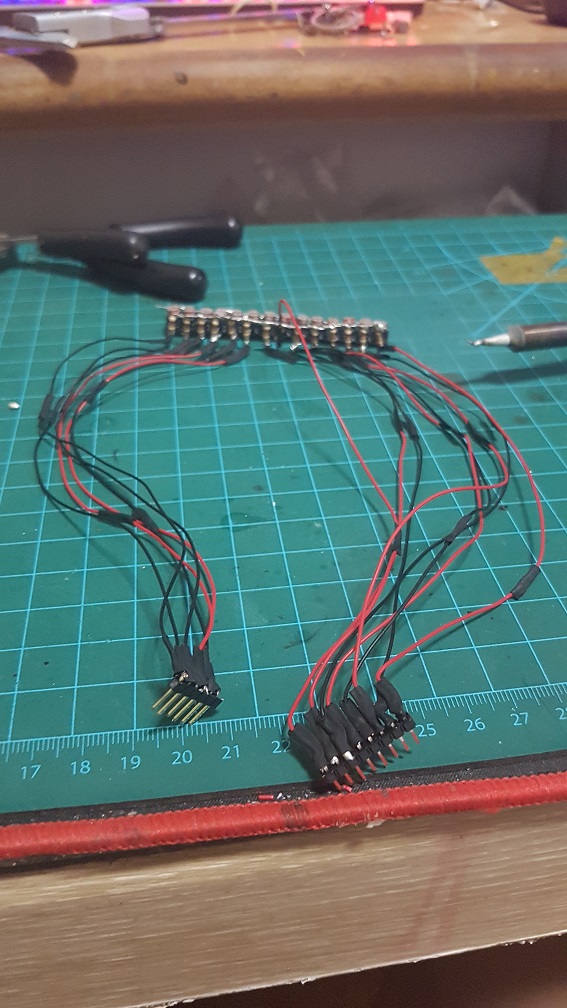
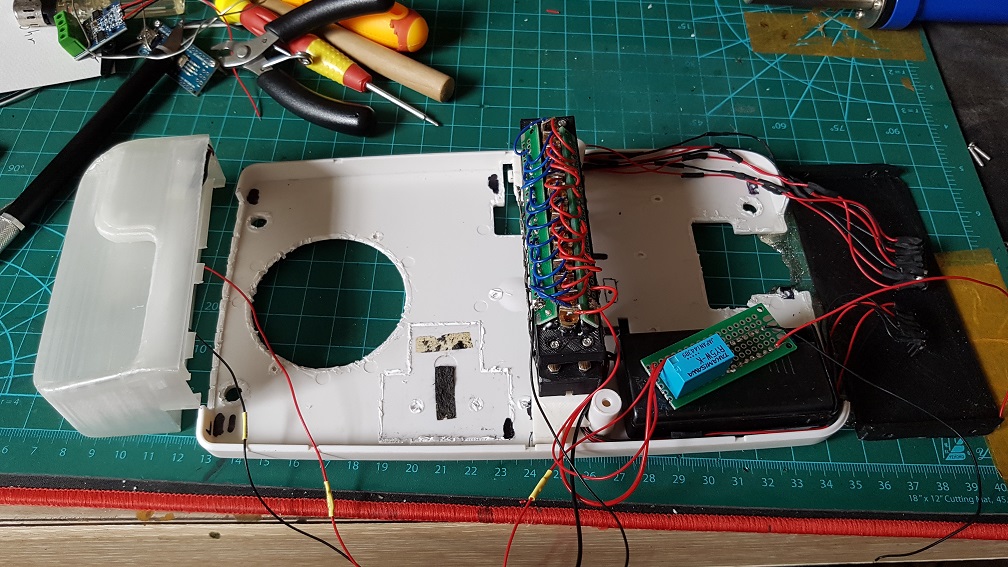
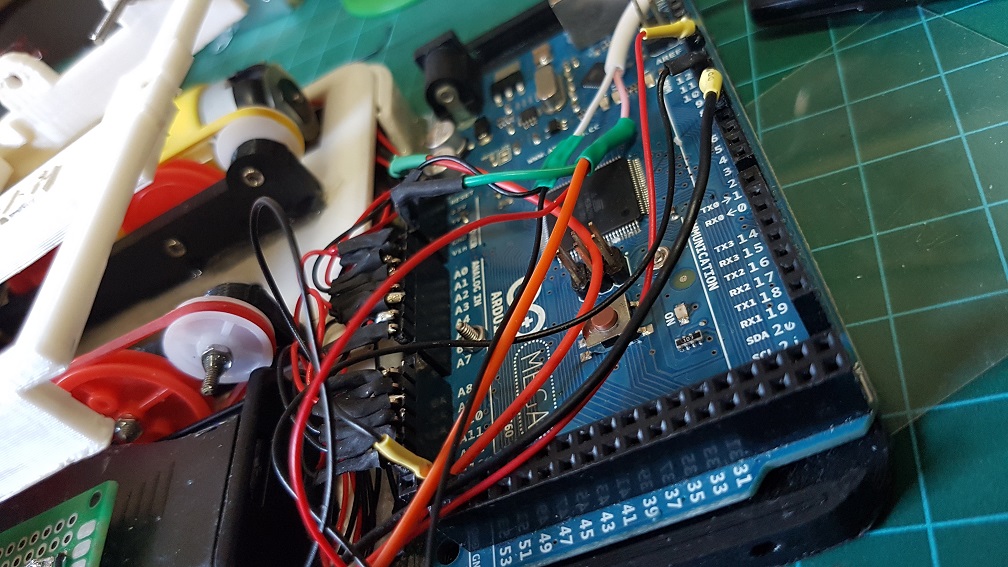
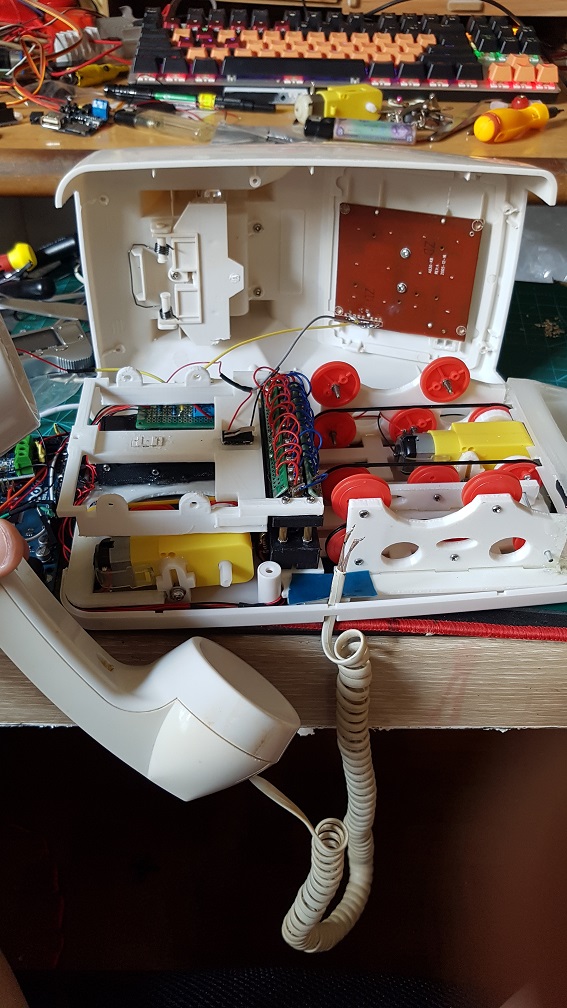
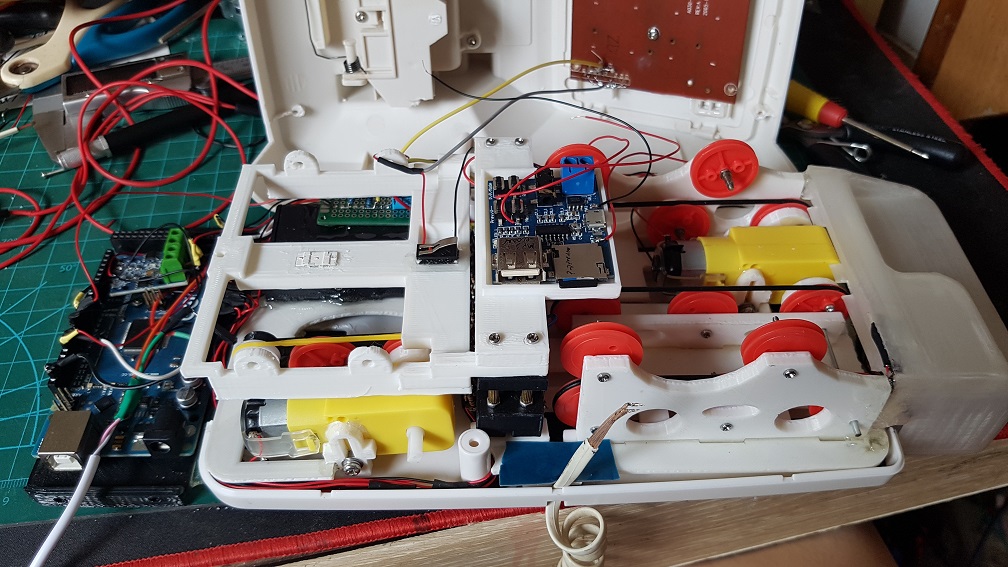
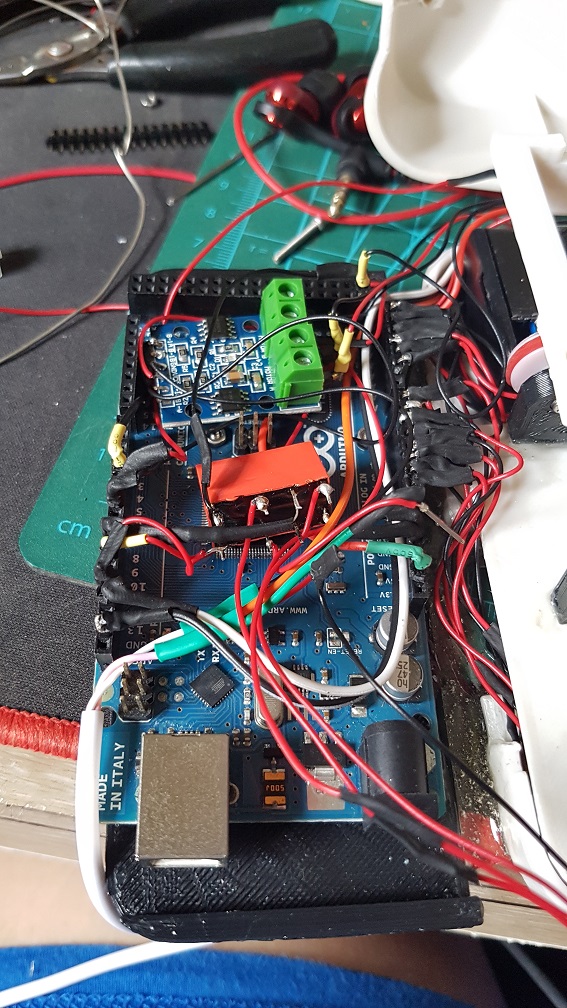
The messy configuration, components and wirings.
It took me some time to sort out these messy wiring and make sure that none of the wires interfere with the track that the Music card is going through.

 after trying out the workable speed of sound and getting stuck by removing the buttons.
after trying out the workable speed of sound and getting stuck by removing the buttons.
and after this, I tried to code the majority of the code together.
For this, I did not expect to work this well and I am really excited about it!
Towards the end of the project.
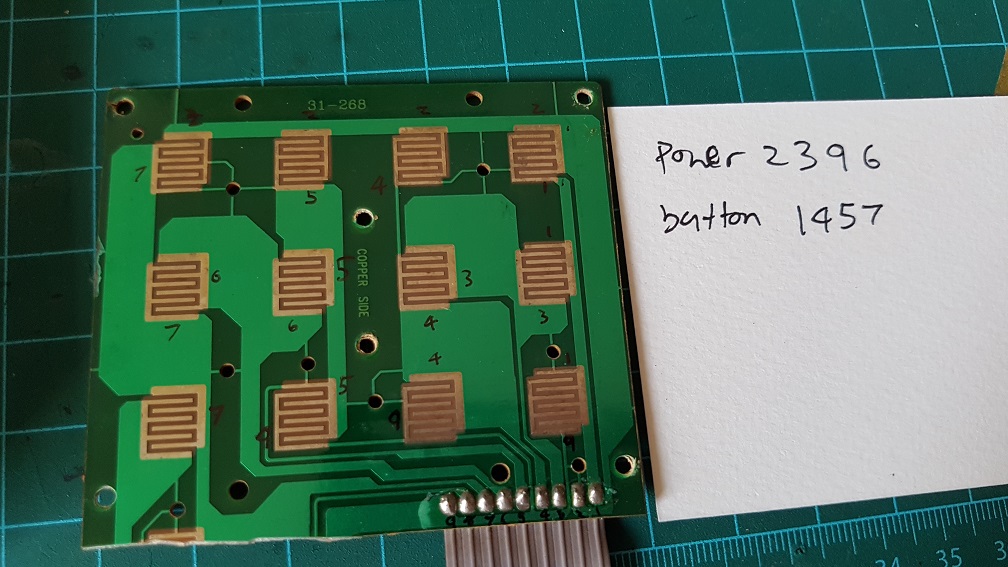 to make use of the original button on the phone, I’ve figured that the 12 buttons runs on 2 different circuit which I could simply solder these number together and make all the 12 buttons into one button, so nomatter which buttons the user pressed, it will be registered as one button pressed.
to make use of the original button on the phone, I’ve figured that the 12 buttons runs on 2 different circuit which I could simply solder these number together and make all the 12 buttons into one button, so nomatter which buttons the user pressed, it will be registered as one button pressed. Because I cut off the Redial button on the phone to make space for my belt driver system, I epoxyed the Redial button back to the case as there are no PCB supporting it.
Because I cut off the Redial button on the phone to make space for my belt driver system, I epoxyed the Redial button back to the case as there are no PCB supporting it.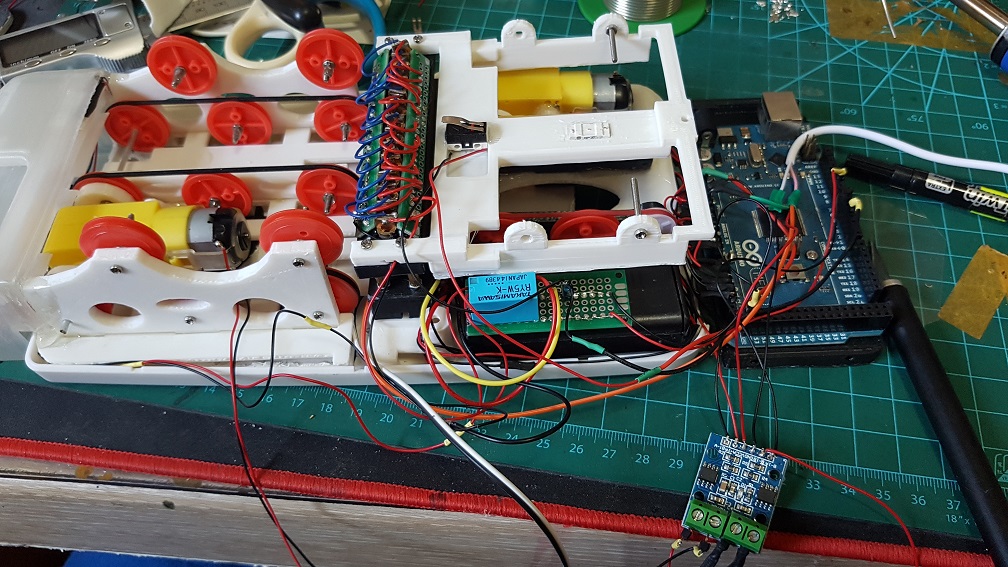


Some may wonder how did I make the Music Card..
I copied a few from online like Demons by Imagine Dragons, Harrypotter’s Hedwig Theme, and Pokemon Theme song, These were labeled on the card and those that weren’t labeled was What I composed myself. Since I have no music background, I did it by trial and error to give it a tune.
This was screen recorded when I tried to compose my 4th tune for this project:
after this was completed, I screen shot it and import into Illustrator to trace it into the Card layout which I made.
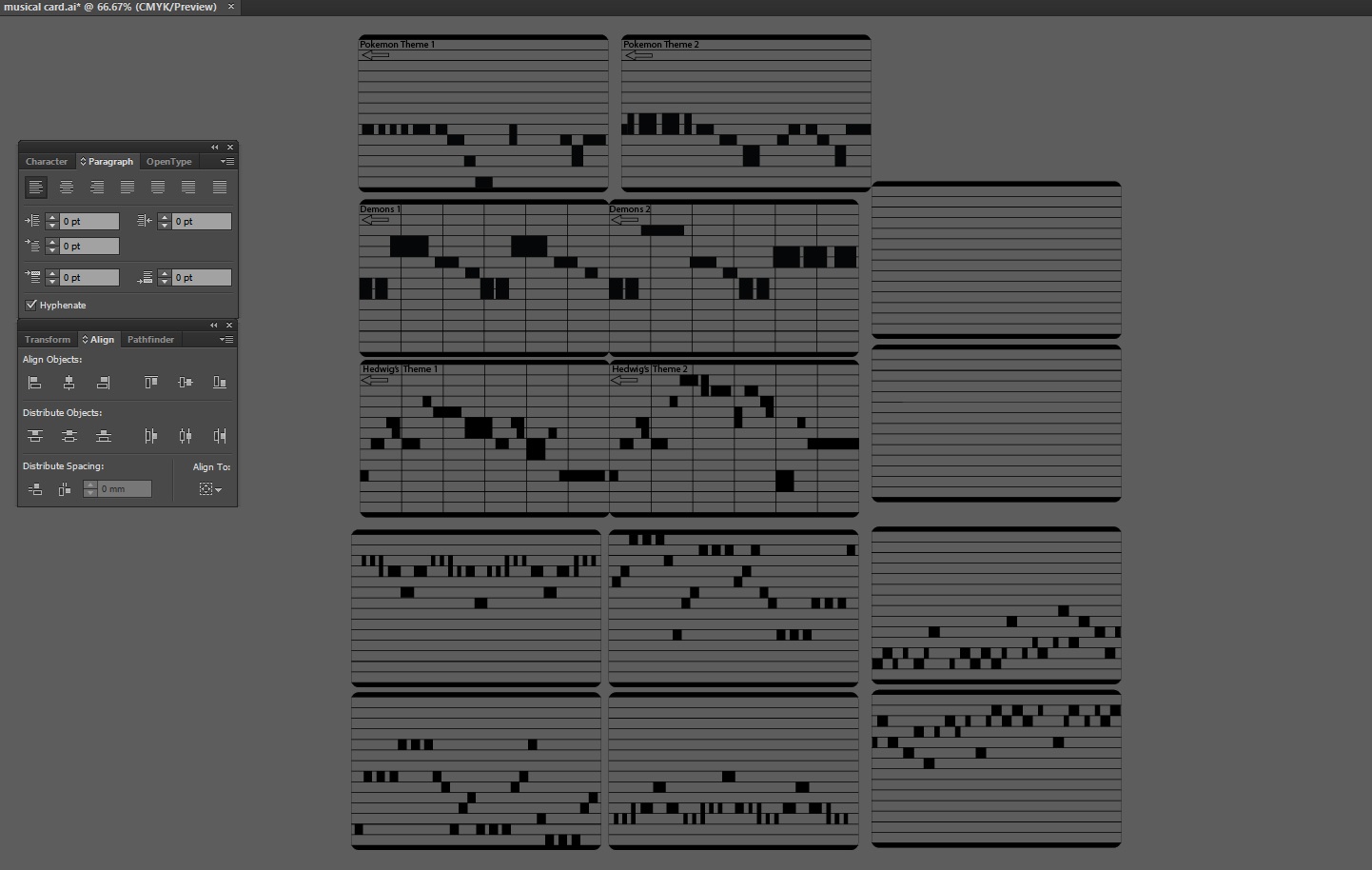 and this was how the cards were made.
and this was how the cards were made.
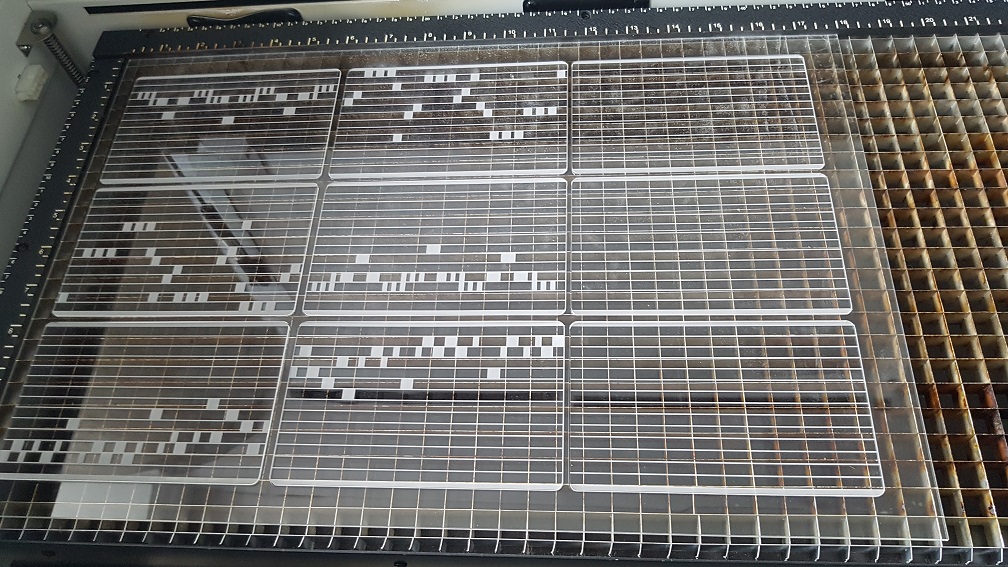 Laser raster and cut in school on 2mm acrylic.
Laser raster and cut in school on 2mm acrylic.
AND how about the voice command in 7 different accent?
well, this is relatively simple, just type whatever I want on Webbased Text to speech reader and have it read it out in different accent and edit them in premiere pro to cut them up to the exact same length(9 seconds) and put them into the SD card within the Obseleting Instrument’s MP3 Decoder.
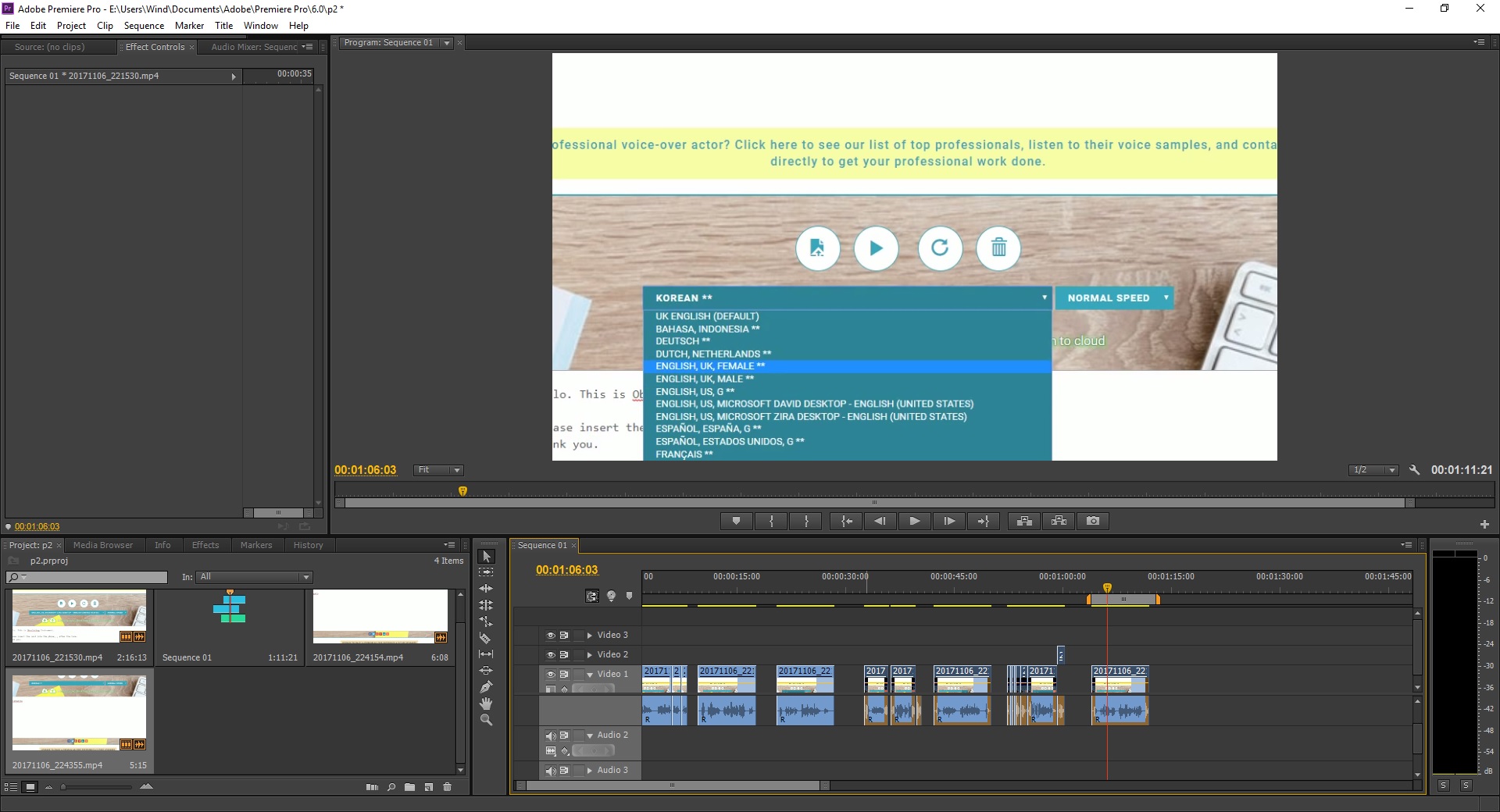 I really like the Japanese and Korean accent, its really funny!
I really like the Japanese and Korean accent, its really funny!
Why did I made it to speak different accent? It was to engage the user and make them feel like there was really life in the system where they called/receive call from a real person, like if they discussed with their friend and their friend said that there was a Indian accent while what they heard was the British accent, they might want to try Obseleting Instrument for a few more time. The accent there is there to add variables in the system.
In Conclusion
Throughout this Project, I’ve learnt many things like how to model objects in Tinkercad and make measurements properly, there are always failures in everything that I modeled before it works, and this is why 3D printing is a good prototype process where I printed it out and tested it to know if it work or not, if it doesnt, I will shave off some piece to see if it fits, if it does, I will make new measurements for the edited model.
 I am really glad that this many piece worked well together and this was the biggest challenge.. since there are so many components working together (electrical and mechanical), even if one of the parts failed, it would not work as well as it is now. So I considered myself really lucky that the parts happened to work well even when there are misalignment everywhere.
I am really glad that this many piece worked well together and this was the biggest challenge.. since there are so many components working together (electrical and mechanical), even if one of the parts failed, it would not work as well as it is now. So I considered myself really lucky that the parts happened to work well even when there are misalignment everywhere.Also, to have a Telephone case in the start and scale everything into the Telephone case was really a challenge especially at the start when I could not measure how big the internal was and could only make a guess and print some test print to try it out.
In this project, I realized that if I were to do a project that require multiple fields of knowledge like mechanical and electrical, It was better if I did not know how hard it will be, if I were to know that every part of the project will be something that I don’t know, I will be too afraid to jump into this project. I did something, realized that it doesn’t work and find solution to that single problem and proceed to work on the project and faced another problem, solving and learning one problem at a time lead me to the completion of the project.
Now that I had completed the project and looking back. Obseleting Instrument is really a complicated project as a whole, but thinking about it, I am just putting many small system into one project- like using one laser diode and a photo resistor as a switch, playing a tune when triggered, a physical button to sense if the phone was picked up, using a relay to control circuits of different voltage, running two DC motor at the same time and so on… Obseleting Instrument is just a collection of small systems, which I personally thinks was what made my journey of doing this project really interesting because I explored the basics of these components and learnt a whole lot through it.
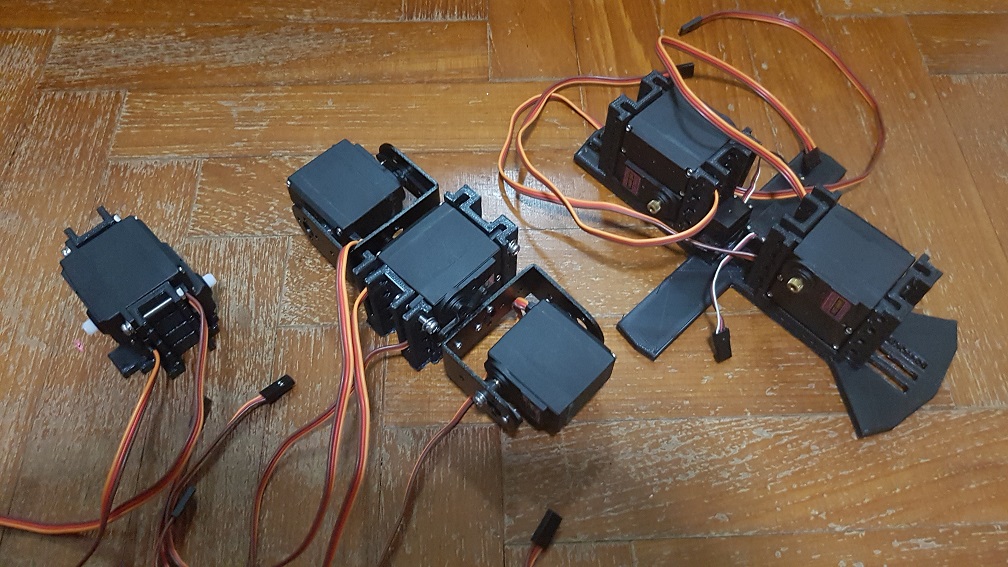
 I did some wiring afterwards.
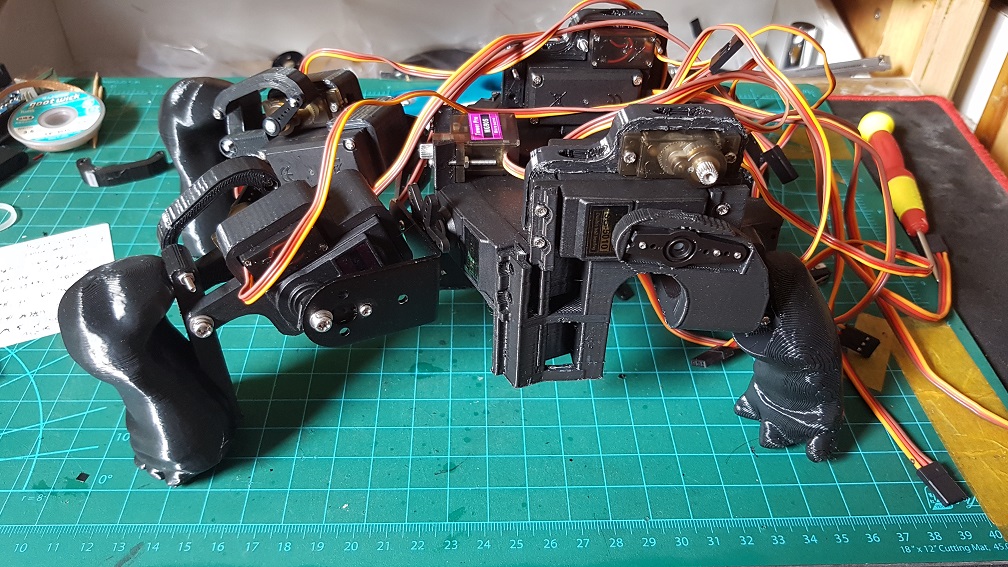
I did some wiring afterwards. And after the wiring, I did power test, it could easily run 8 servos simultaneously with nothing overheating. which is a great news for me!
And after the wiring, I did power test, it could easily run 8 servos simultaneously with nothing overheating. which is a great news for me!


 This was quite the final base before I added the mount for the small backleg servo and the servo driver mount which will be attached it using screws.
This was quite the final base before I added the mount for the small backleg servo and the servo driver mount which will be attached it using screws.



 Nothing is more satisfying in removing the support in one whole chunk(I did alot of cutting before this video so I can pluck out in one piece.)
Nothing is more satisfying in removing the support in one whole chunk(I did alot of cutting before this video so I can pluck out in one piece.)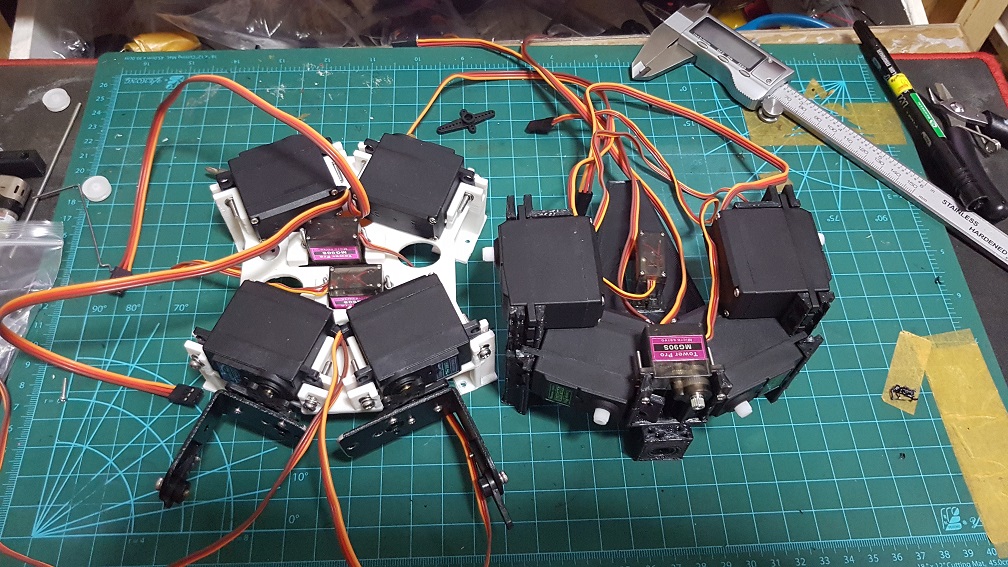

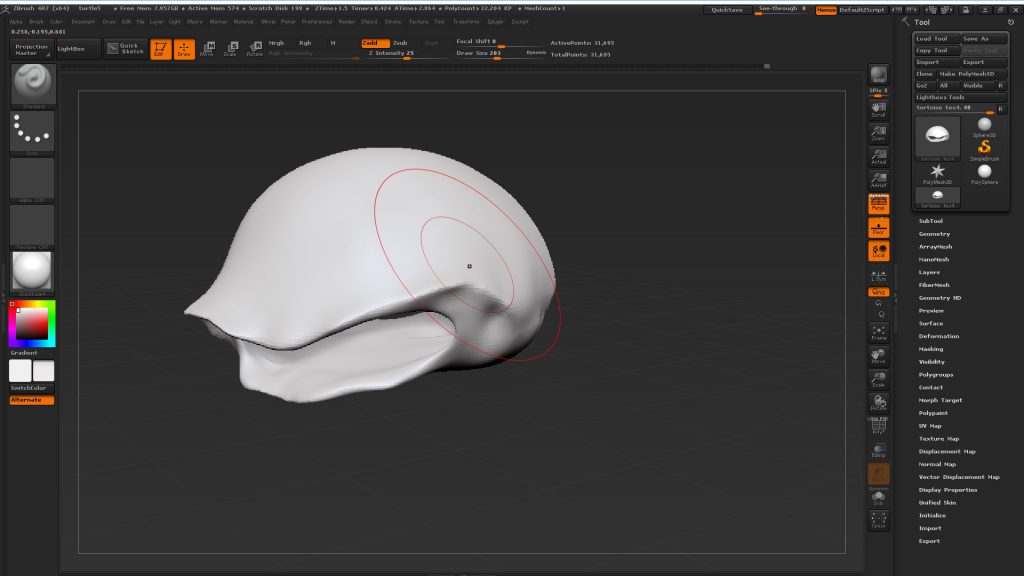
 this is the liner slider an an aluminium rod for the head system.
this is the liner slider an an aluminium rod for the head system.






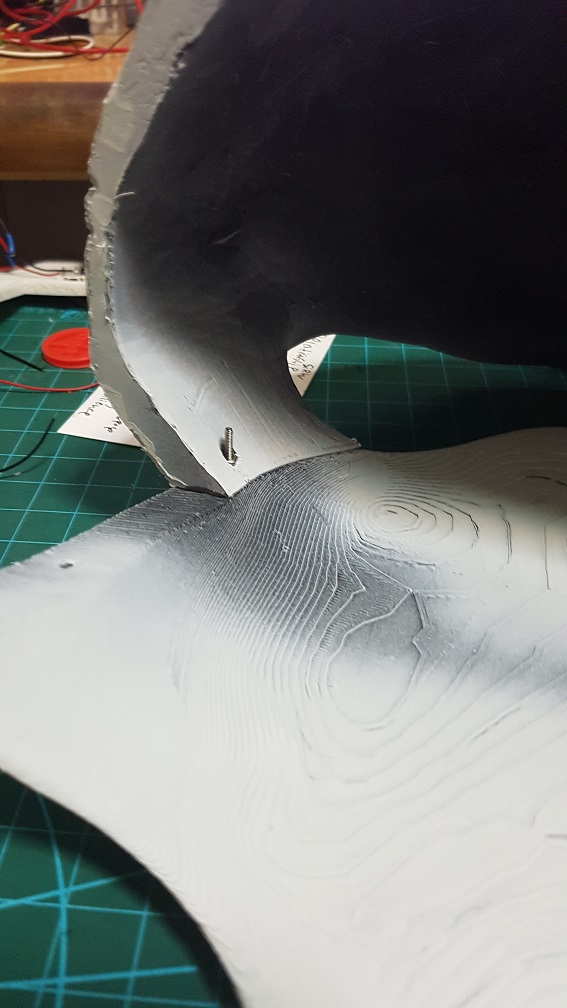
 testing out of the head slider and to mark the length I need it to move and cut.
testing out of the head slider and to mark the length I need it to move and cut. The mechanism to slide the head that I will use after cutting the rod to almost the size I need.
The mechanism to slide the head that I will use after cutting the rod to almost the size I need.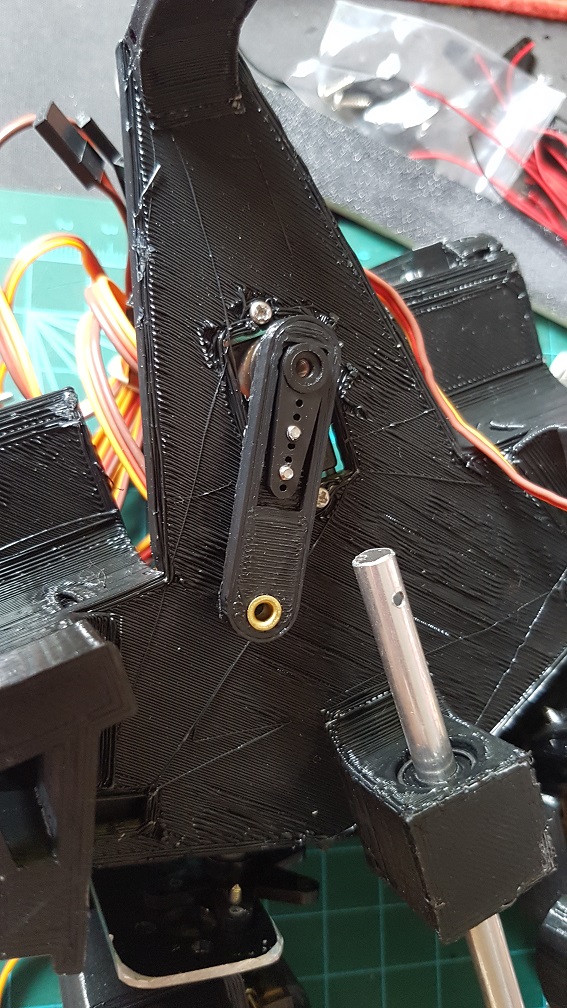
 this is the final mechanism for the head after I printed a small piece to prevent the wire from tilting too much when pushing the rod.
this is the final mechanism for the head after I printed a small piece to prevent the wire from tilting too much when pushing the rod. the head could be push and pull out nicely even before adding the string to control the tilt of the head.
the head could be push and pull out nicely even before adding the string to control the tilt of the head. metal rod were epoxyed into the head to tie the elastic thread to control the tile of the head.
metal rod were epoxyed into the head to tie the elastic thread to control the tile of the head.





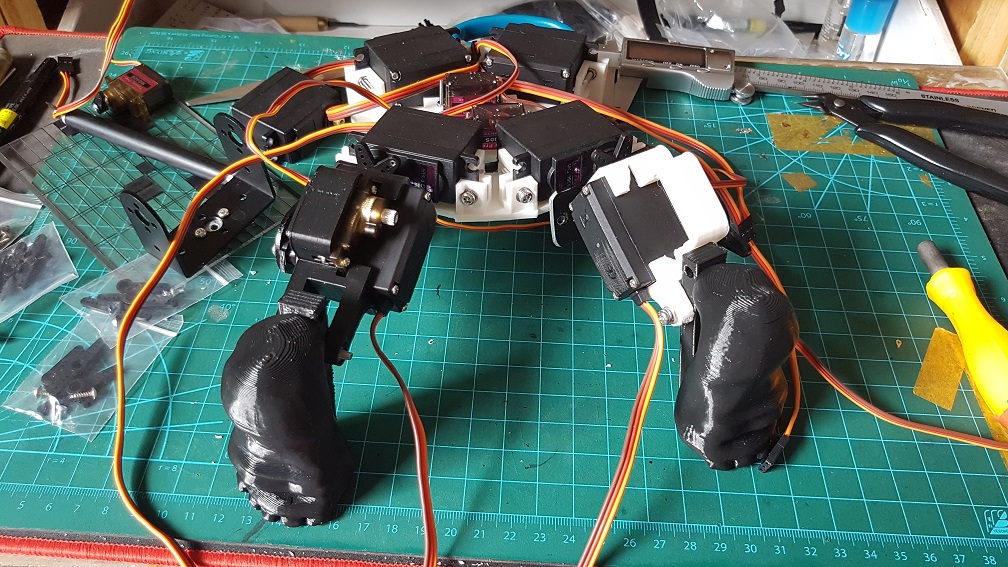
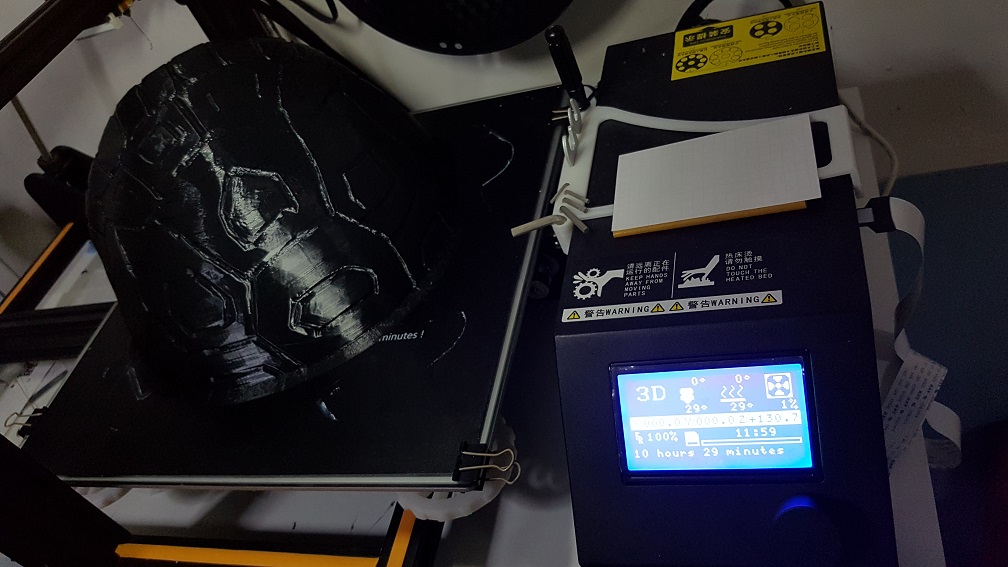
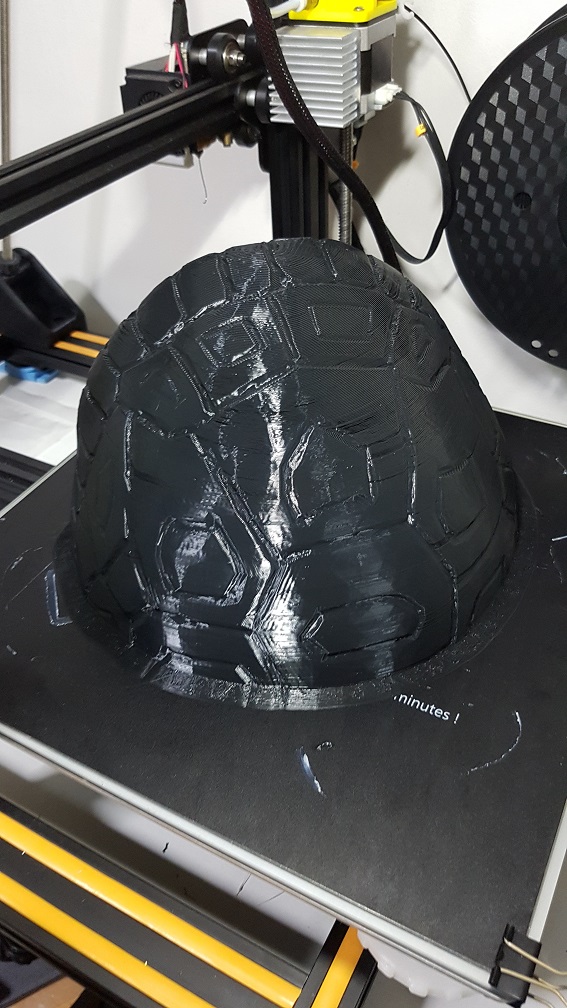
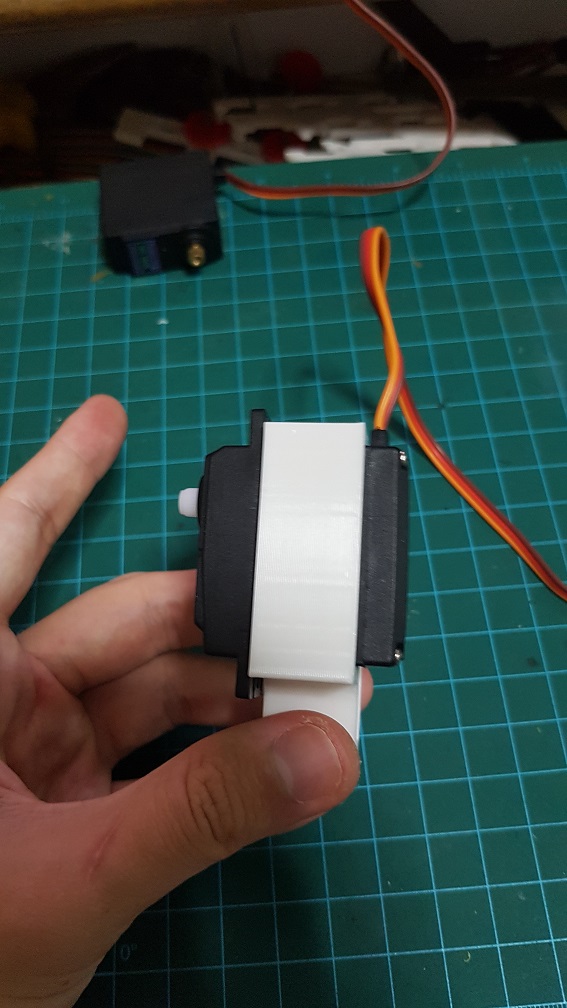
 The final test of the turtle before I finally started coding it. The head uses elastic thread because it will go forward and retract, since I dont want anything to be loose and might interfere with the shoulder servo motor, I decided to use elastic thread so that the thread wont be loose when the head is retracted.
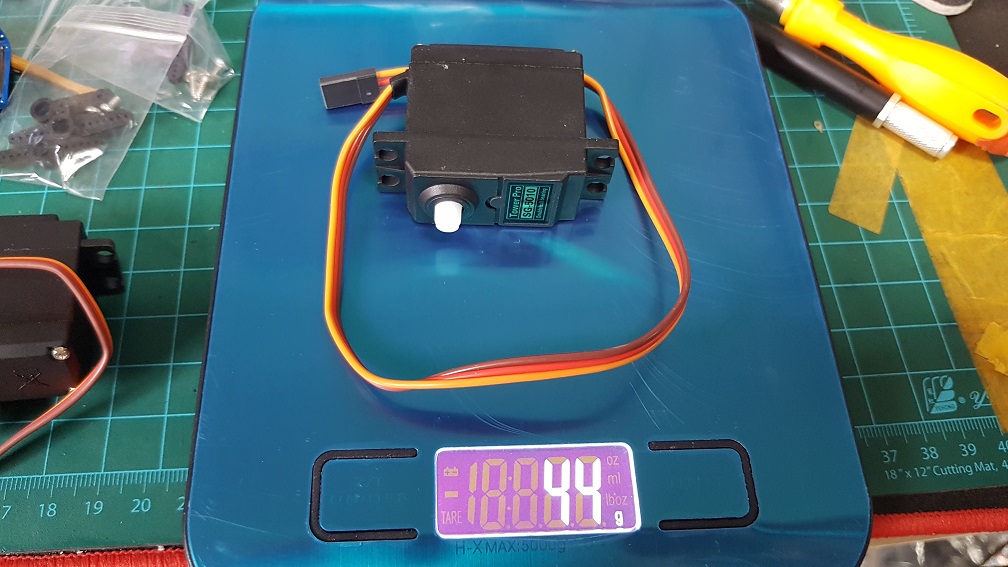
The final test of the turtle before I finally started coding it. The head uses elastic thread because it will go forward and retract, since I dont want anything to be loose and might interfere with the shoulder servo motor, I decided to use elastic thread so that the thread wont be loose when the head is retracted. This is the almost completed sequence of action,the turtle’s movement is quite restricted due to the shell and the back leg is unable to push the turtle forward because of the shell’s restriction as well as the weaker servo(MG90S) which is responsible for the forward and backward thrust, while the MG966R is strong enough to lift the turtle up, so the turtle could do movements up and down but not walk.
This is the almost completed sequence of action,the turtle’s movement is quite restricted due to the shell and the back leg is unable to push the turtle forward because of the shell’s restriction as well as the weaker servo(MG90S) which is responsible for the forward and backward thrust, while the MG966R is strong enough to lift the turtle up, so the turtle could do movements up and down but not walk. This was what made into my final turtle with many component being edited into the next version.
This was what made into my final turtle with many component being edited into the next version.
 at the end of the scissor paper stone segment, we all synchronized to the same action of the paper and Bao and I were counting on 5, so we all were showing our palm.
at the end of the scissor paper stone segment, we all synchronized to the same action of the paper and Bao and I were counting on 5, so we all were showing our palm.



















 I really like this random shot before the Stroll.
I really like this random shot before the Stroll. After the stroll, when the sun finally rise.
After the stroll, when the sun finally rise. Luckily for me, right after we finished the broadcasting, it started to drizzle. And did I mentioned that we were supposed to do on Monday morning and we woke up at 5a.m. and it was raining so we postpone our stroll, it was really lucky for us that it wasn’t raining on Tuesday morning even when the weather forecast said would.
Luckily for me, right after we finished the broadcasting, it started to drizzle. And did I mentioned that we were supposed to do on Monday morning and we woke up at 5a.m. and it was raining so we postpone our stroll, it was really lucky for us that it wasn’t raining on Tuesday morning even when the weather forecast said would.




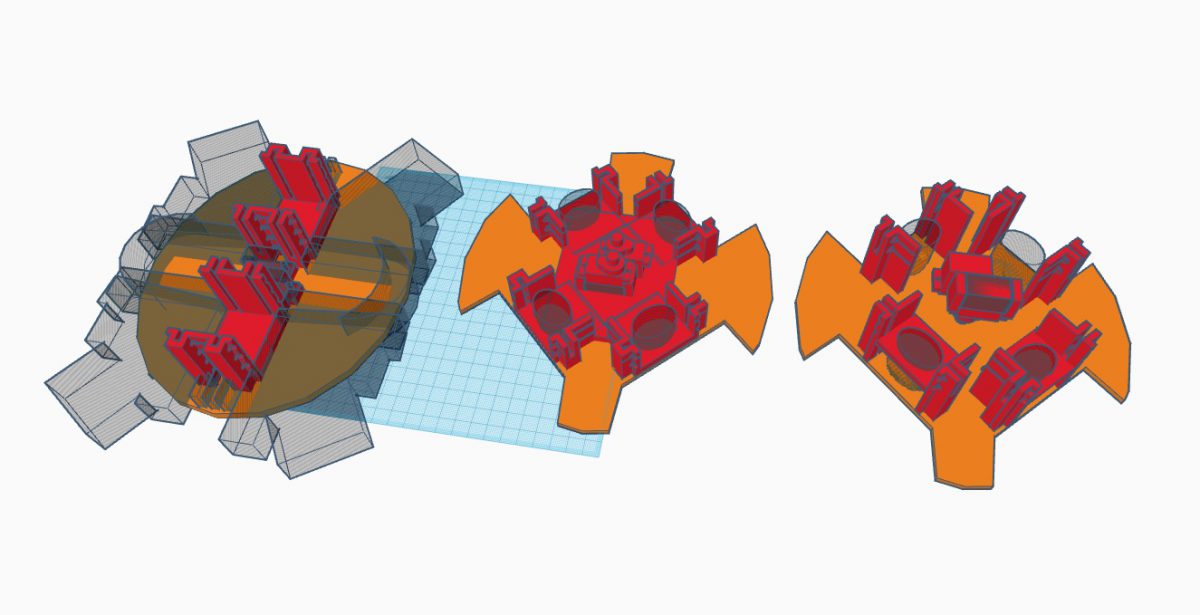



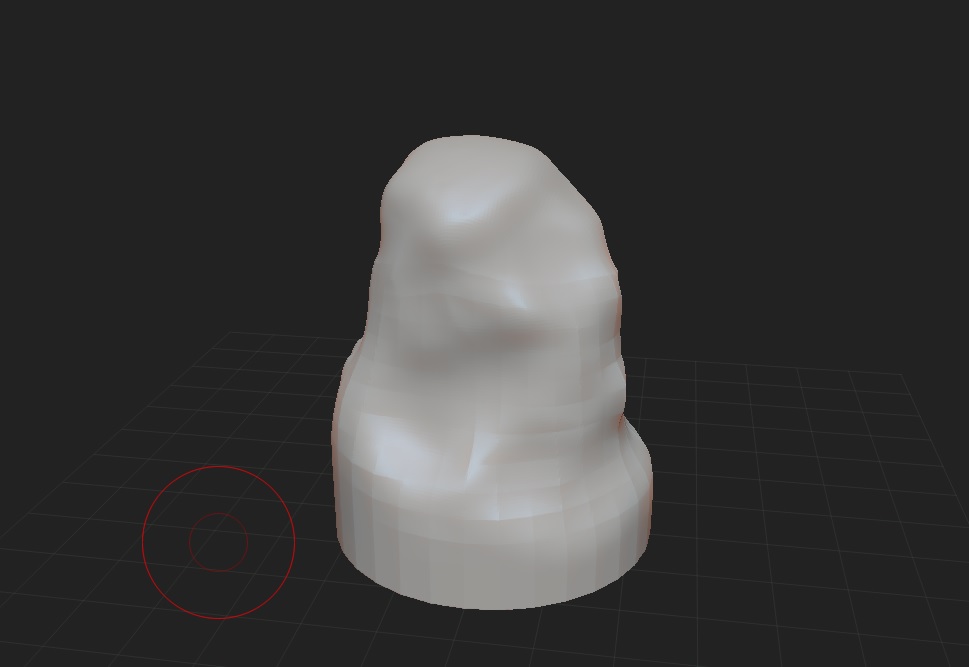
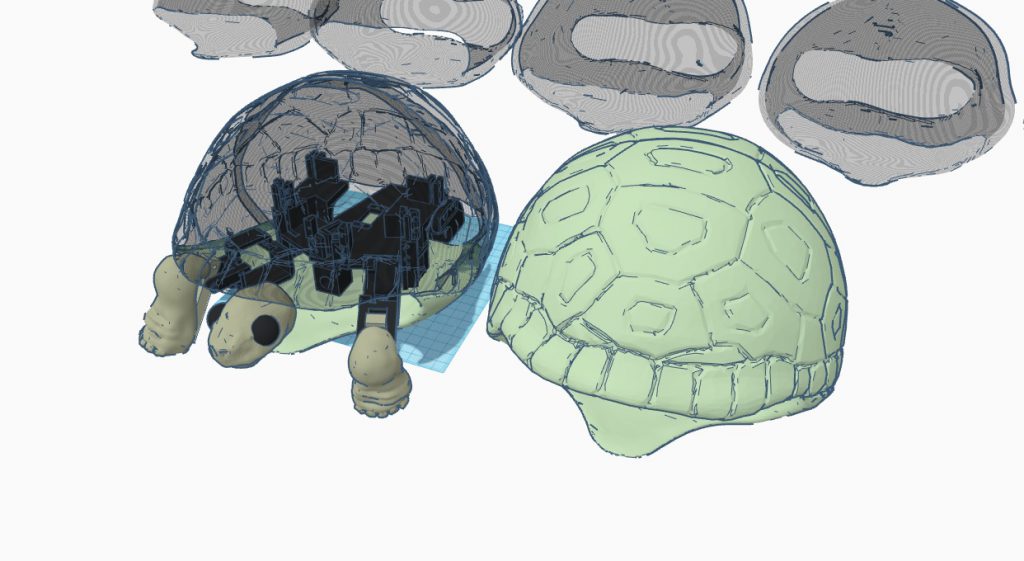
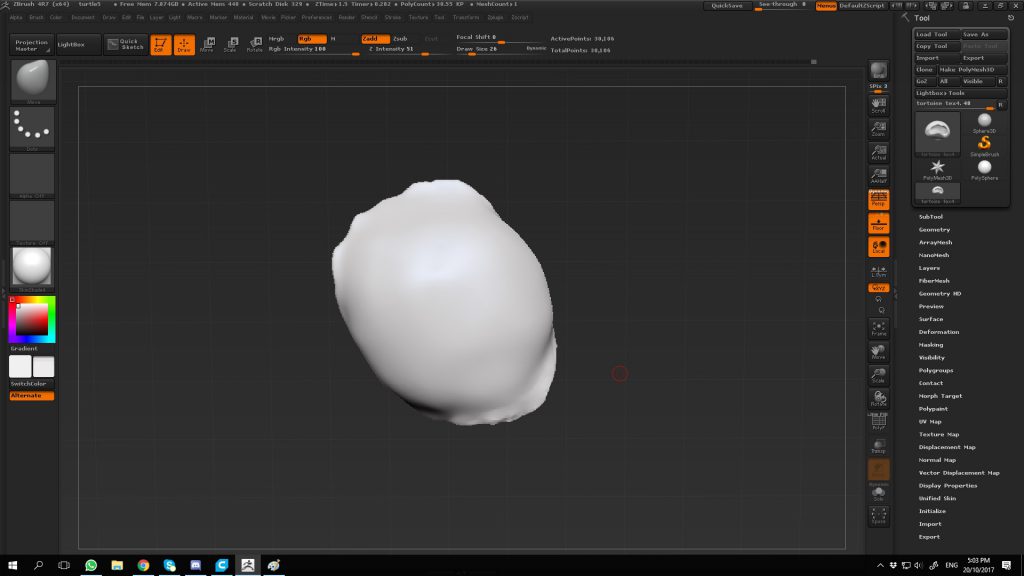
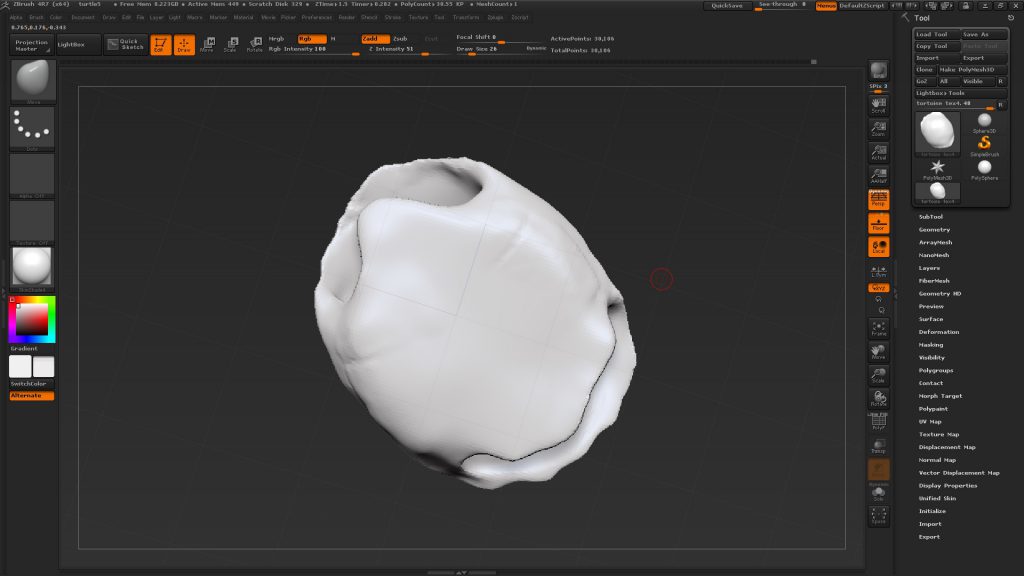
 This was originally the rough full size for the turtle base, Version1, Version 2 with 2 arm motor attached, and Version 3 with no Arm motor attached.
This was originally the rough full size for the turtle base, Version1, Version 2 with 2 arm motor attached, and Version 3 with no Arm motor attached.

 And to check which layout should work.
And to check which layout should work.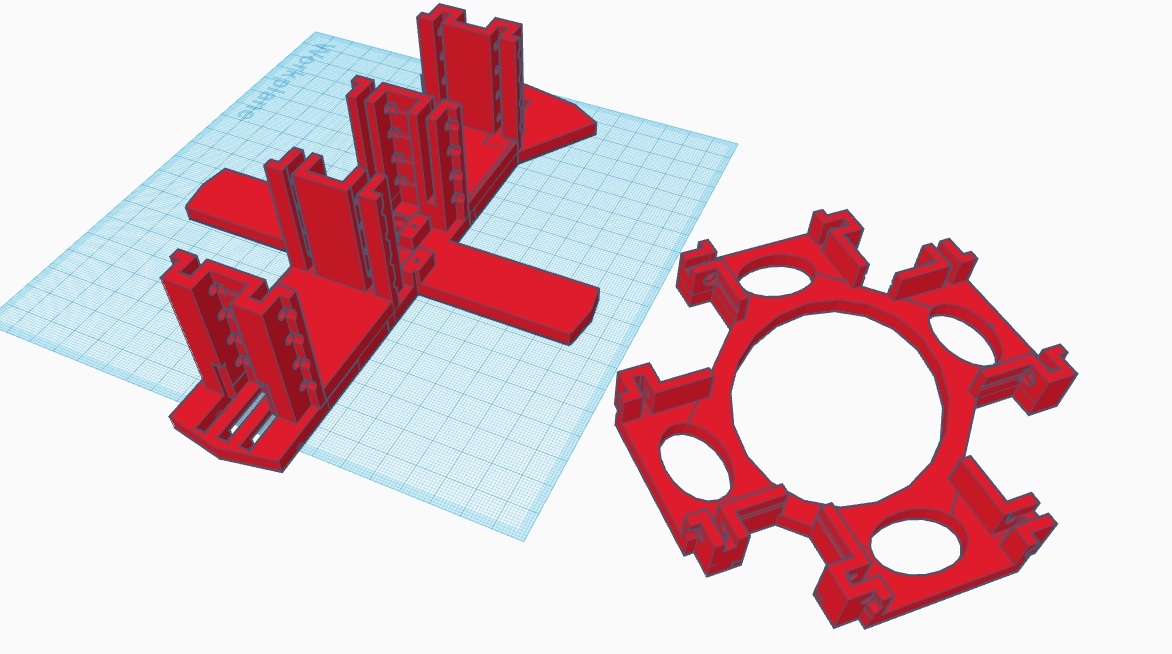 and since after I did more research on turtle, I realize that the bone structure of the turtle wasn’t straight and so I tilted the motors to give it an angular tilt for it to move more like a turtle.
and since after I did more research on turtle, I realize that the bone structure of the turtle wasn’t straight and so I tilted the motors to give it an angular tilt for it to move more like a turtle.
 I also modeled a arm motor connector and found out that this is WAAAYYY to long for it to work properly, and another problem is that there is still not enough tilt, so I changed from a 45 degree tilt to a 22.5 degree tilt.
I also modeled a arm motor connector and found out that this is WAAAYYY to long for it to work properly, and another problem is that there is still not enough tilt, so I changed from a 45 degree tilt to a 22.5 degree tilt.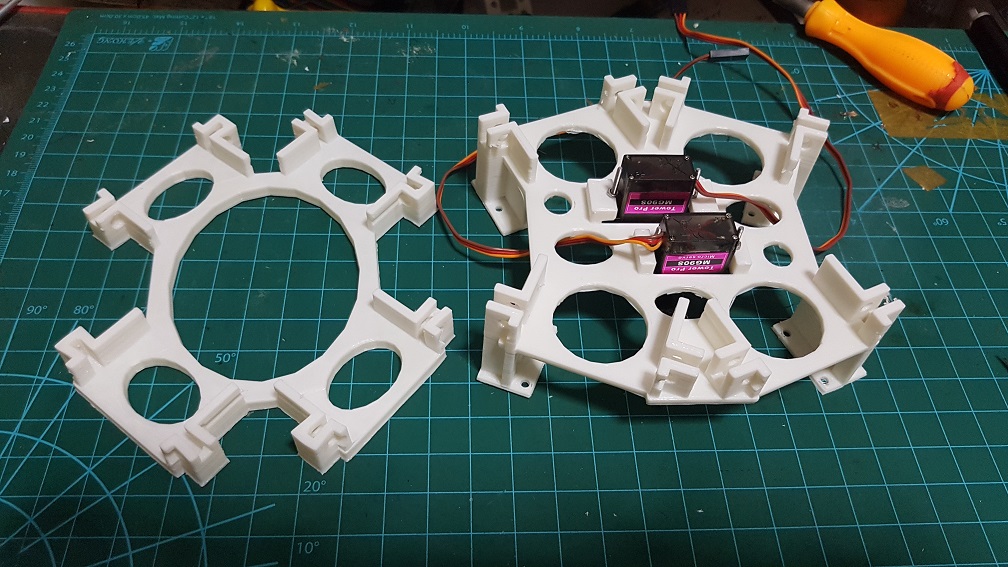 This is the Version 4 and Version 5 of the motor mount, I’ve decide to make it higher so to be able to turn the arm in the correct direction, I’ve also tried to add the middle servo which will control the turtle head retraction and head/tail turning.
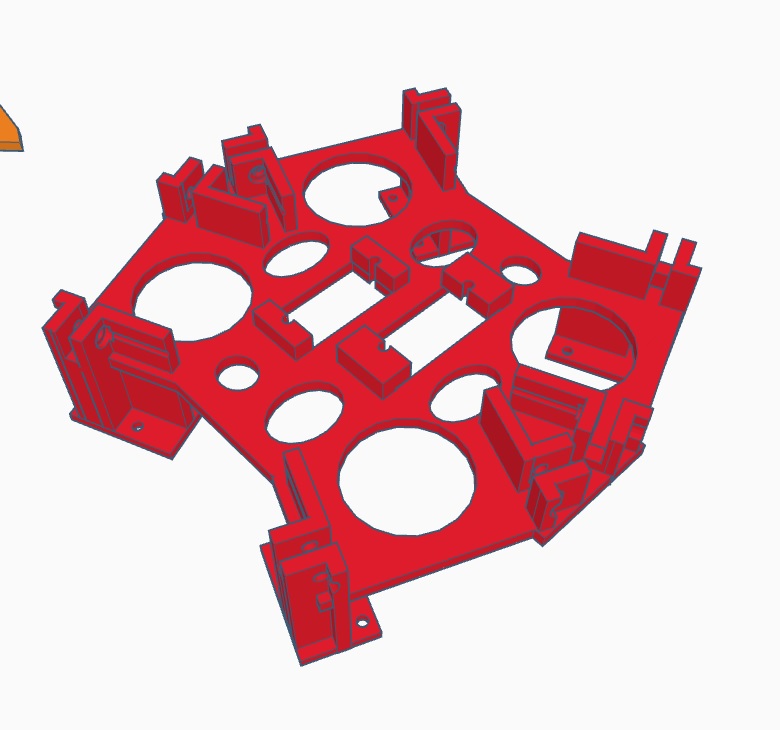
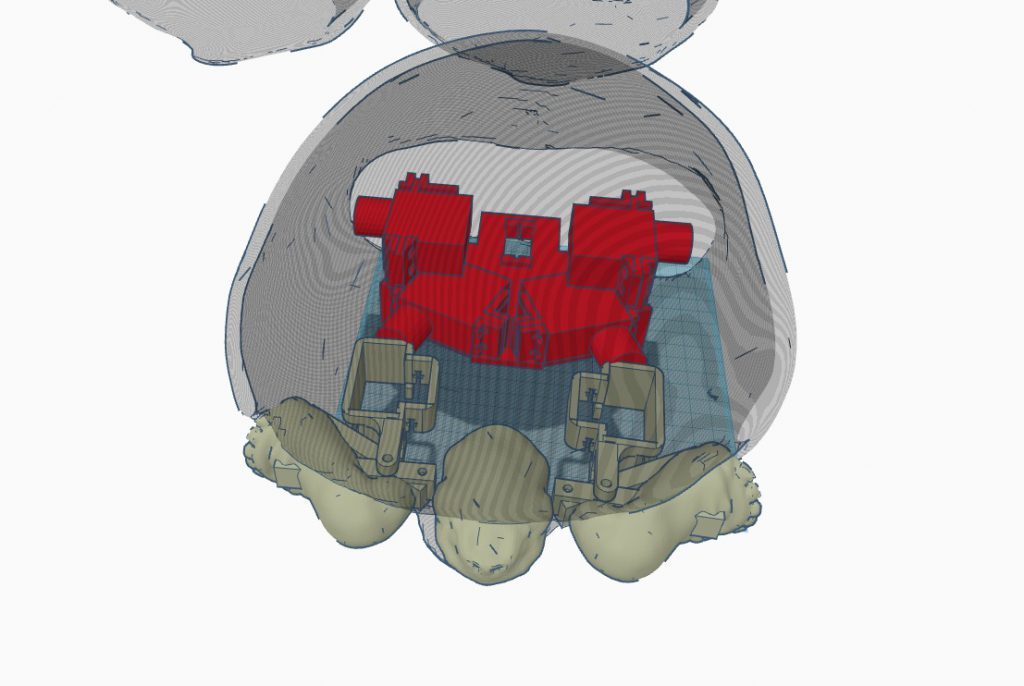
This is the Version 4 and Version 5 of the motor mount, I’ve decide to make it higher so to be able to turn the arm in the correct direction, I’ve also tried to add the middle servo which will control the turtle head retraction and head/tail turning.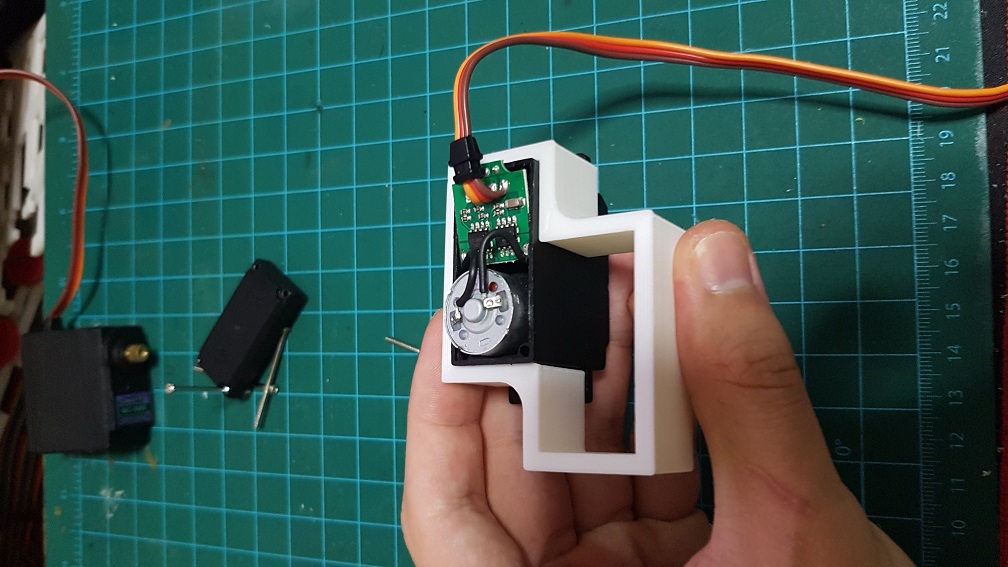
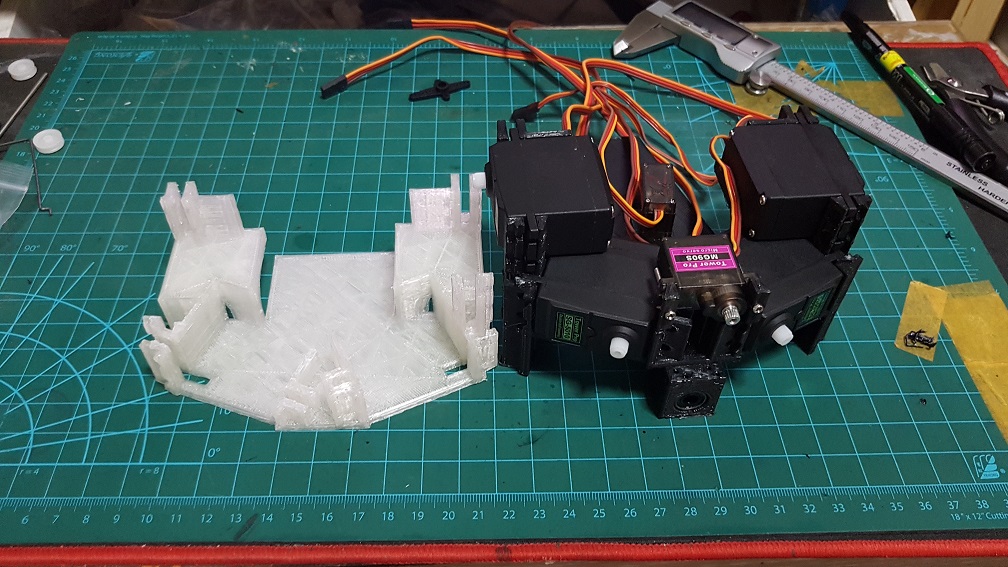
 This is with Version 5 base and version 2 Motor connector which are much shorter.
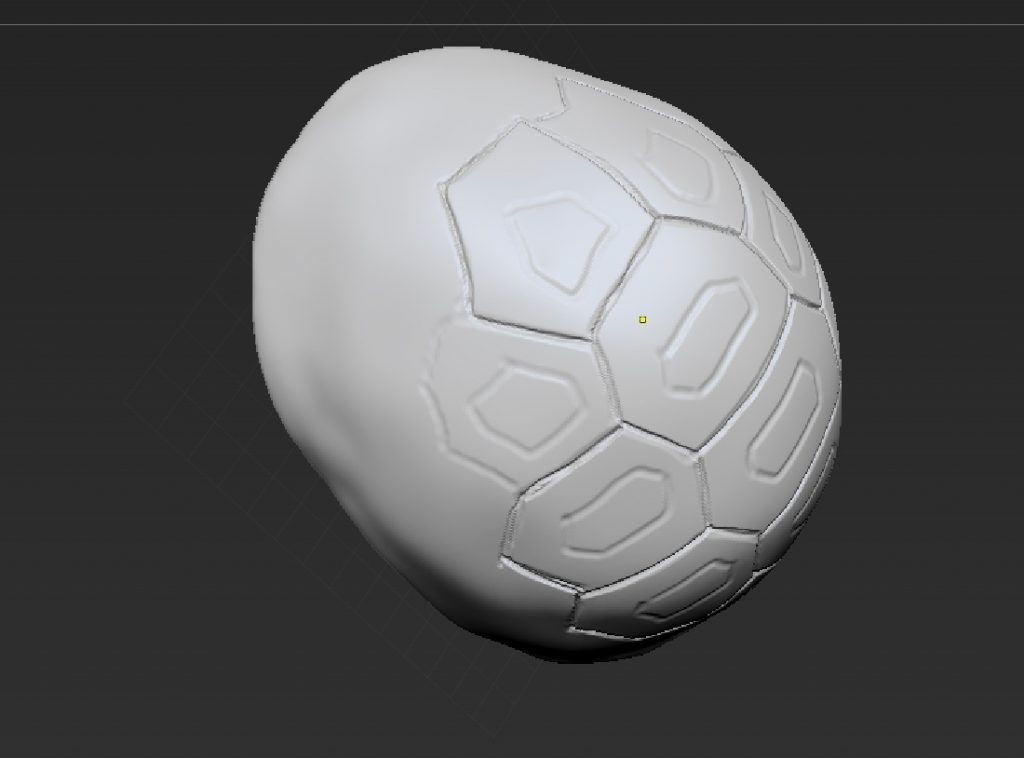
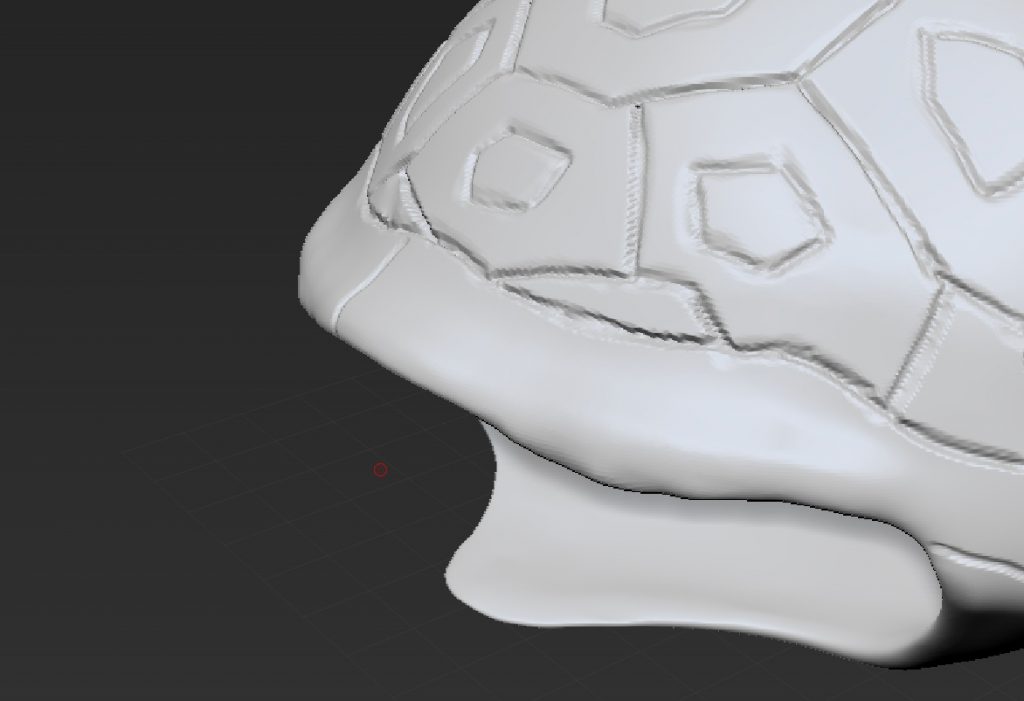
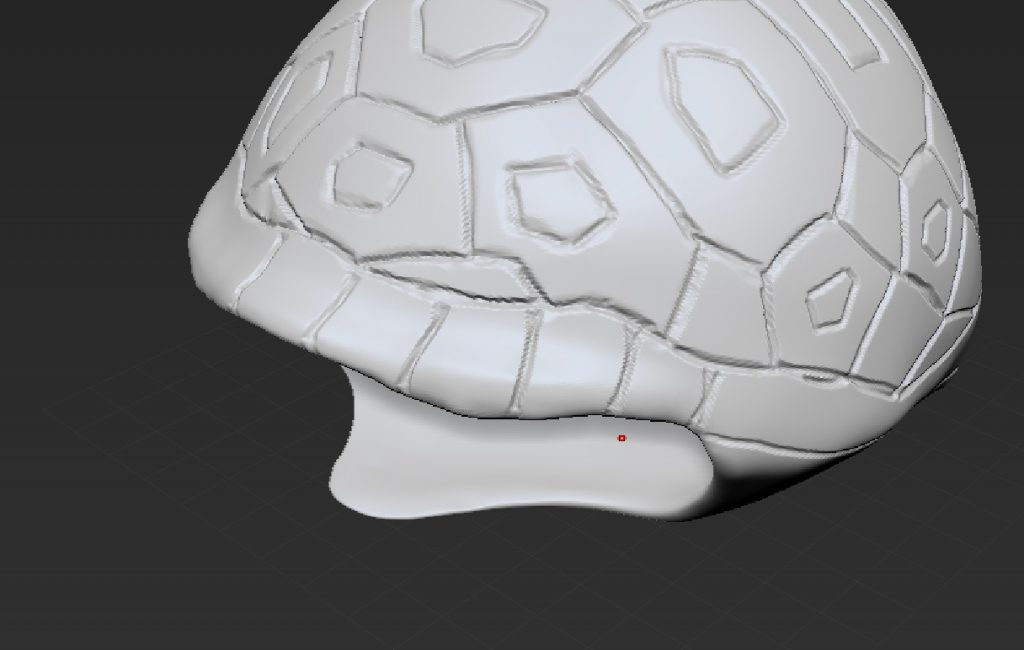
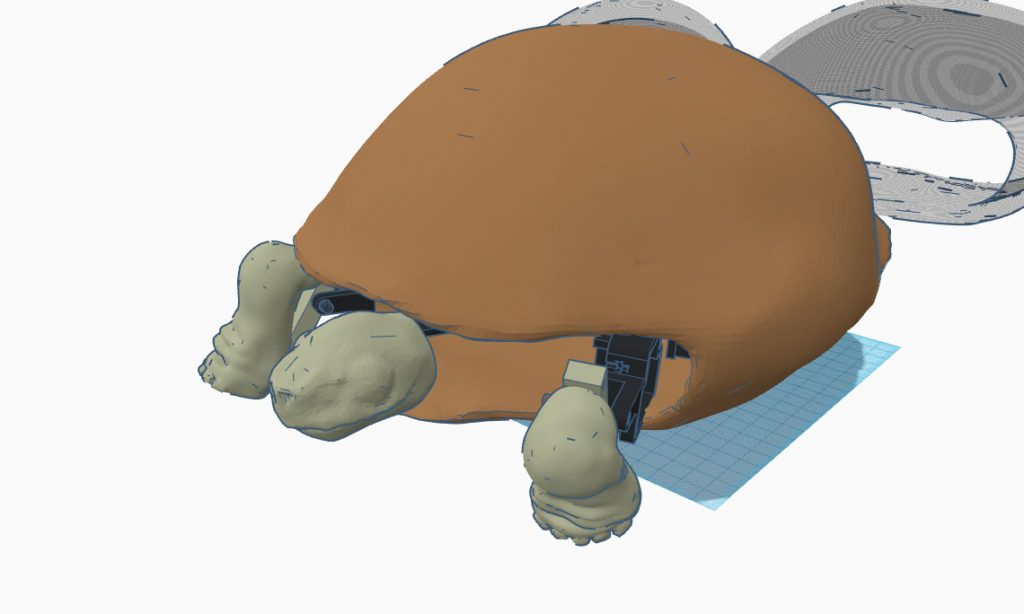
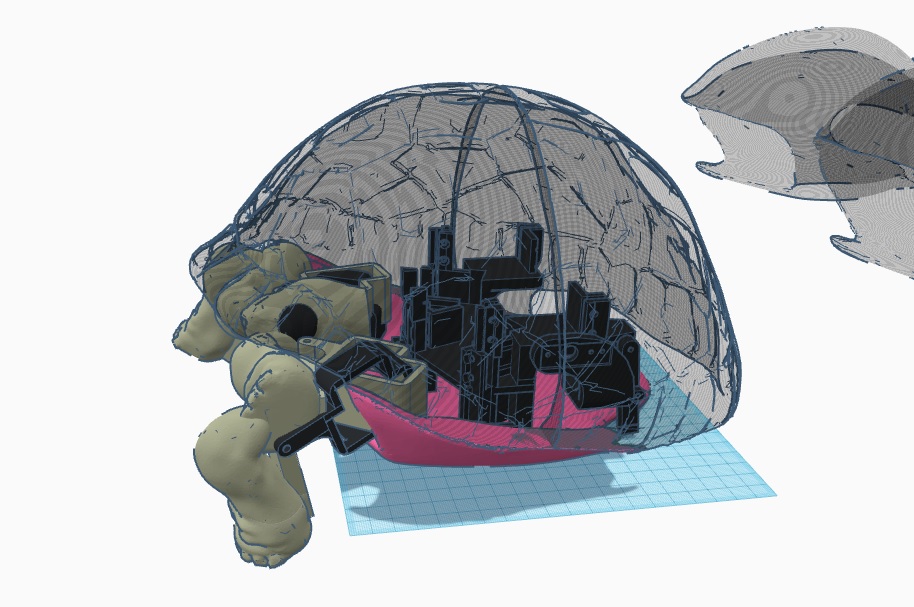
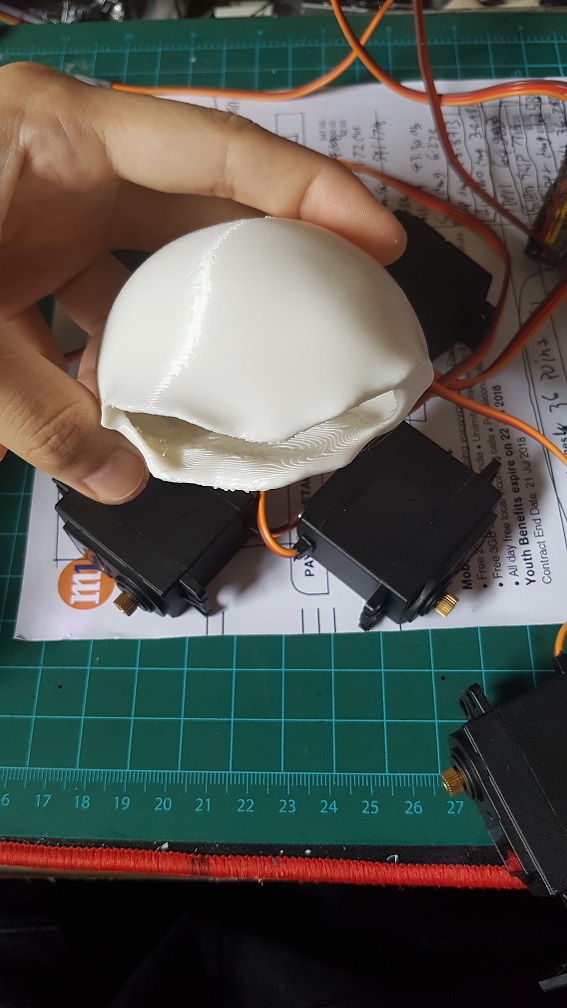
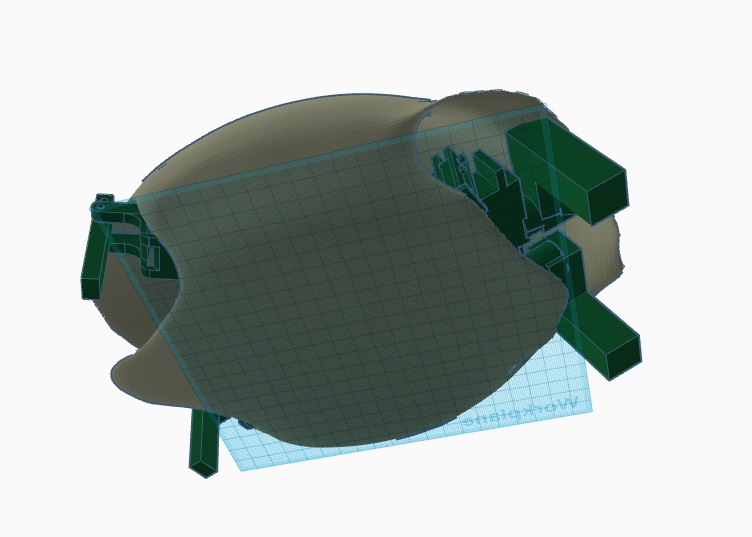
This is with Version 5 base and version 2 Motor connector which are much shorter.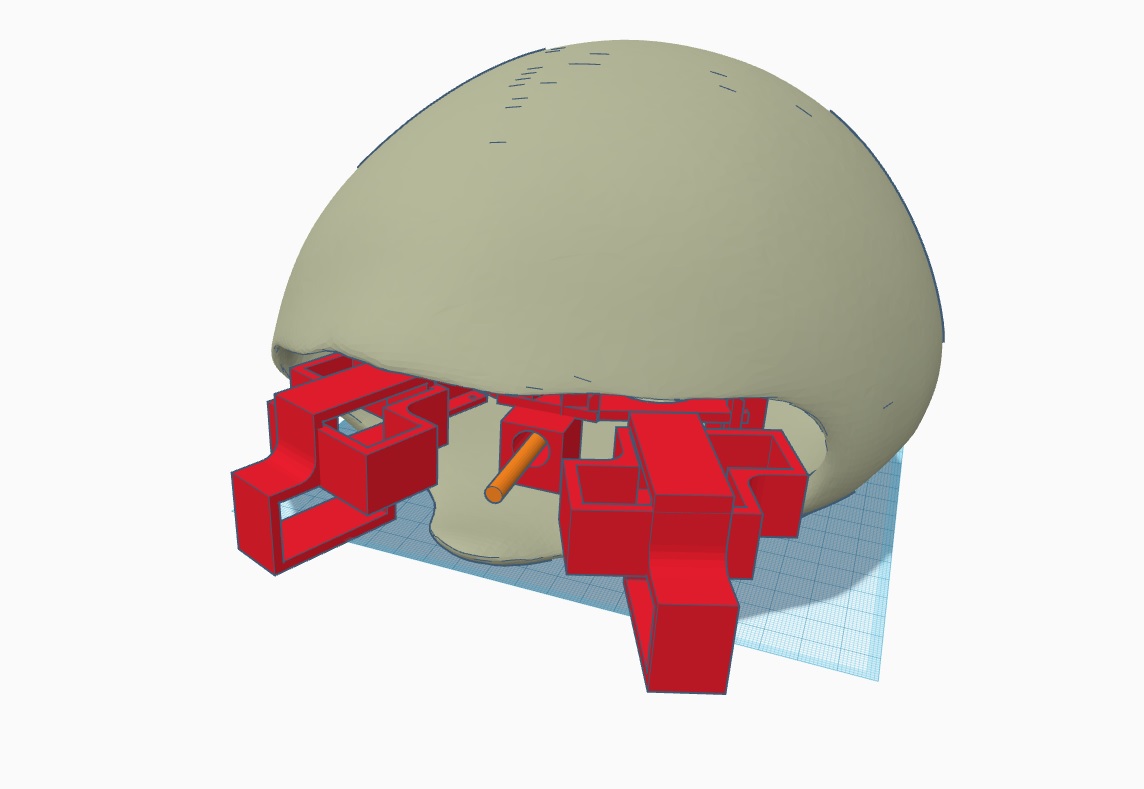 Next, I further edit the turtle shell and upscale it to see how it fits into my system, however i found many problems here like it doesnt fit well. Since I can make adjustments to the layout, I decided to use another method to do the leg mechanism.
Next, I further edit the turtle shell and upscale it to see how it fits into my system, however i found many problems here like it doesnt fit well. Since I can make adjustments to the layout, I decided to use another method to do the leg mechanism.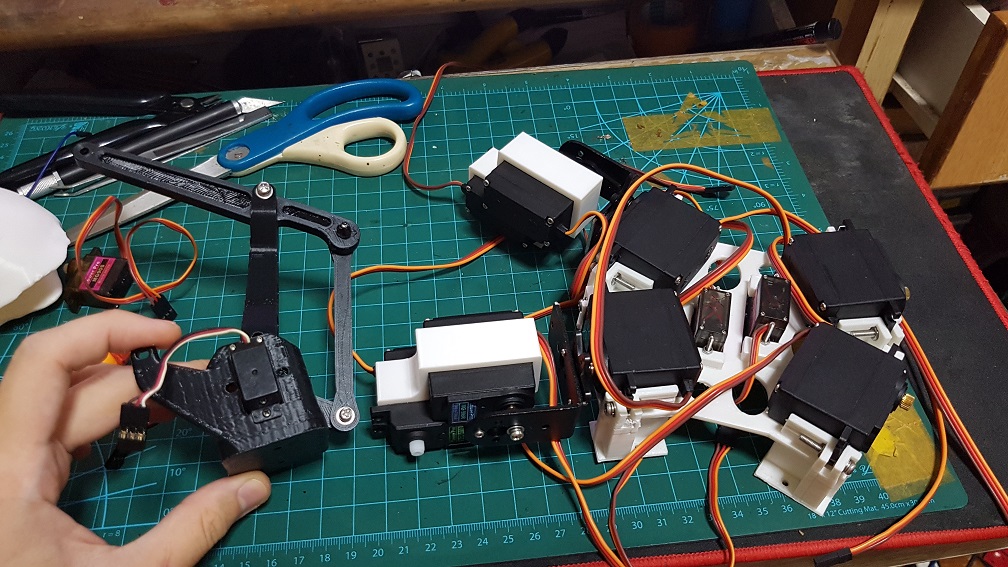 By combining this lever system straight into the leg.
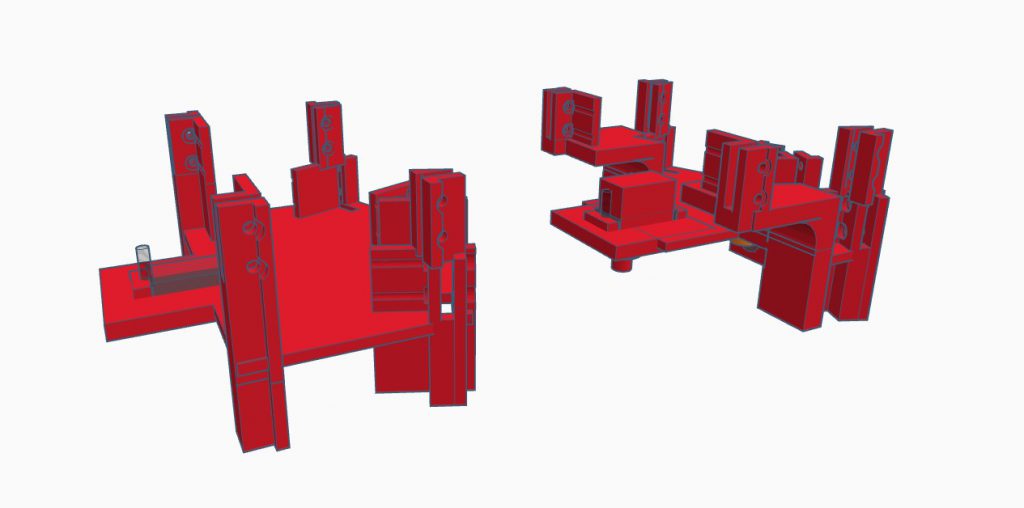
By combining this lever system straight into the leg.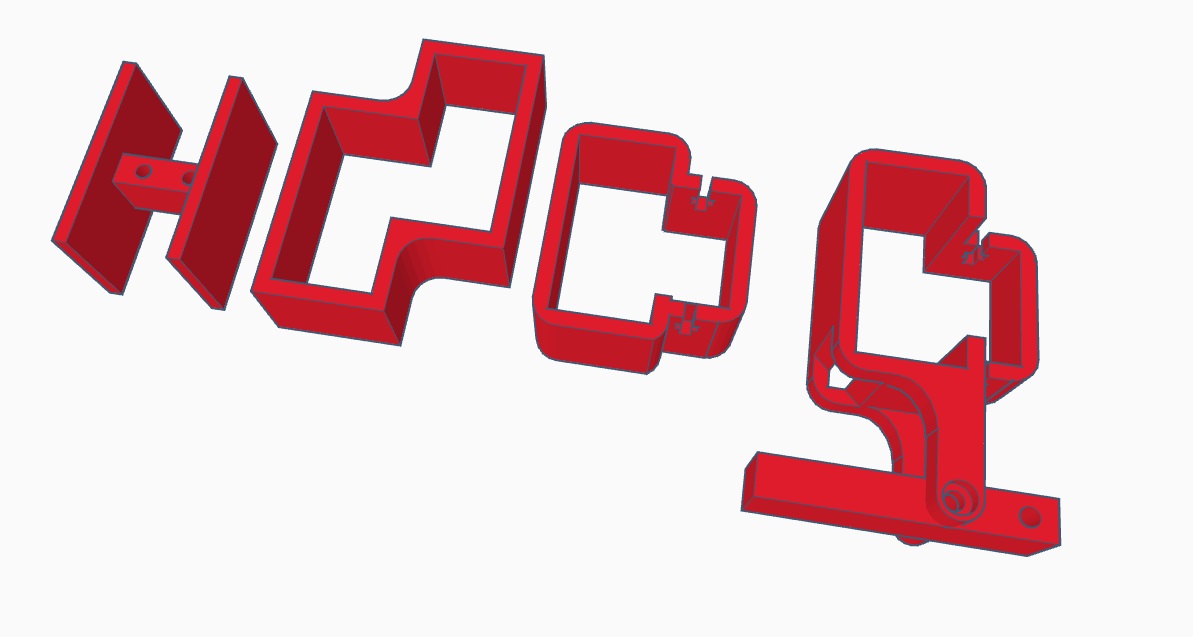 The 4 generation of motor connector.
The 4 generation of motor connector.
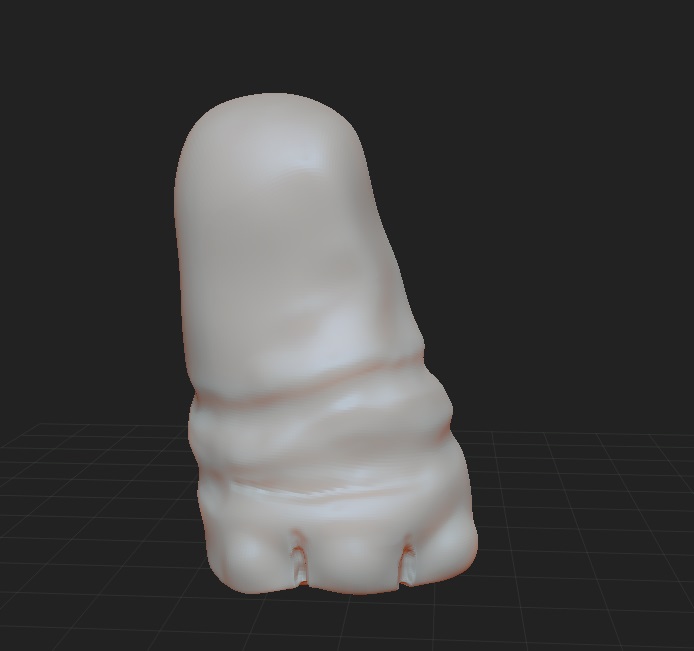
 This should be the mechanism I will use for the leg, I hope it works.
This should be the mechanism I will use for the leg, I hope it works.
 This is the segment where we pass the phone to the next grid, we hope to achieve an effect that feels like we are moving in a straight line instead of passing in circle, we will only know the final effect when we view it from the grid.
This is the segment where we pass the phone to the next grid, we hope to achieve an effect that feels like we are moving in a straight line instead of passing in circle, we will only know the final effect when we view it from the grid. and this, just one video alone wont have any effect, but we hope to achieve a panorama spin effect through this when the grid is out.
and this, just one video alone wont have any effect, but we hope to achieve a panorama spin effect through this when the grid is out.