The Second Front performance was extraordinary and unlike anything that we’ve experience in internet art and culture, the performance is entirely within a virtual world(third space) where what was common in the Second Life was totally impossible in the real world that we live in(like physics and such).
To be really frank, I started the research about Second Front by reading the Assignment Post and watching the two video over there, IT MADE EXACTLY ZERO SENSE TO ME, I am like..
WHAT THE SHH IS HAPPENING? WHY DID THEY USE THE HELICOPTER WHEN THE BANK IS RIGHT BELOW THE MANSION? WHY DID THEY SIT ON THE MISSILE HAPPILY? WHERE DID THE MISSILE EVEN COME FROM? WHAT IS THIS FLOATING BALLET DANCER THING? WHAT IS HAPPENING??
WHHHHHHHYYYYYYYYYYYYYYY~~~~~~~~?
“A good piece of art gives you a sense of wonder but a piece of astonishing art make us feel foolish” but I felt really stupid after watching both of the video, because I must be too slow to not get the meaning/message of them. So I carried on in the researches by starting to understand what exactly Second Life is….

Wait… This Second Life is actually a really interesting “Game” that have no boundaries or whatsoever. Users could create their game character anyhow they want, make their character to do anything, build all sorts of structures and items in the game and there are even user using Second Life to raise funds for real life volunteer funding which I think is such a good use of third space as a medium to solve problem in the third world! 
Back to the topic of the work of Second Front
I think what Second Front was doing was really amazing as they are all from different country and meeting, planning and executing the performance in the third space while transcending any laws(physic or social) which is only possible in the third space, Grand Theft Avatar felt like a piece that was drove by the inner desire of human, it started with the characters in the “Evil Genius Mansion” with the dramatic music and I think this is a reflection of us dreaming to be a badass in some point of our life like having super power- able to fly, super strength etc. and in the Grand Theft Avatar scenario, they are the “Rich Evil Genius”(rich because of the helicopter which is totally unnecessary) whom disguise themselves to rob the bank with the “Genius brain” that could unlock the safe to take all the Lindens in there, annnnnnnddddd *Plot Twist* they are trying to portray that they are not evil at all but rather acting as the Robin Hood who steals from the rich and “Give” it to the poor as we can see that the money is all scattered from the helicopter soon after they take flight but if it was the money they were after, scattering the money will be the last thing they do.
I really admire that Second Front is an adult group who are really childish(Just to clarify, being childish is a good thing, like child in their heart still survived) and they could make such wonderful performance in Second Life, when I was much younger, I was a gamer who did things which were really similar to the what Second Front were doing but on a much smaller scale, I remembered that I made my friends to wear a set of costumes in the Massive Multiplayer Online Role Playing Game (MMORPG) called MapleSea but in a private server, we dressed up as the Meso Ranger and went around helping(Disturbing) people.

It was fun to be “Someone else” other than the normal character we used in the game and doing something we normally wouldn’t do with the disguise on, this was exactly what Second Front had done in the Grand Theft Avatar.
I would like to quote Alise Iborg when asked question about the rehearsal vs Improvisation in their work:
If it is better improvised we will probably do that. Each has its advantages and disadvantages.
With prerecorded performances, we can fine tune and edit out things we don’t want the audience to see. But with improvised performances, the work takes on a life of its own fueled by the creative energy of our players which really shows through.
Also, many times, it’s the surprises and unintended actions that make the work really come alive!
Isn’t this exactly what we learnt in this module? “Also, many times, it’s the surprise and unintended actions that make the work really come alive!”. Alise Iborg is more likely to have an improvised performance than a prerecorded one (its kind of paradoxical as their work was prerecorded and edited, but the content in it seemed really organic and improvised) and this is the spirit of having a performance(live or not) and if we embrace and accept the possibility that things will not go as planned or even planned to have the unplanned happenings, it would make organic pieces which unique and flavorful due to the shift against logical interpretations.
Afterall, Second Front is having fun making these artwork which some were funny, some were totally illogical, but the main thing which we all can learn is to have fun in the process is more important than having the perfect end result, I am sure Second Front laughed out loud when they were executing their pieces while they were like “FLYYY!! MAKE MORE OF THEM FLYYY!!! HAHAHAHAHAHAHAHAHAHAHAHAHAHAHAH!!!!”


 This is a take from our second co-Broadcasting which we focused on testing for Final project. we did the face merge thing like in the adobe connect.
This is a take from our second co-Broadcasting which we focused on testing for Final project. we did the face merge thing like in the adobe connect. Since we have the same object, we decided to use it as our advantage and “pass” to the other person and merge it on screen so it appeared to connect in the split of the screen.
Since we have the same object, we decided to use it as our advantage and “pass” to the other person and merge it on screen so it appeared to connect in the split of the screen. Another Adobe Connect trick, so now our body parts are not limited to spatial restriction and can travel through the third space. (somewhat)
Another Adobe Connect trick, so now our body parts are not limited to spatial restriction and can travel through the third space. (somewhat) and we tried to synchronize our movement which is REALLLYYY difficult.
and we tried to synchronize our movement which is REALLLYYY difficult. Lastly, as Makoto suggested, the side profile it kind of difficult but it is really interesting if we can get it to synchronize and turn our face. Which we did and had a relative success
Lastly, as Makoto suggested, the side profile it kind of difficult but it is really interesting if we can get it to synchronize and turn our face. Which we did and had a relative success 






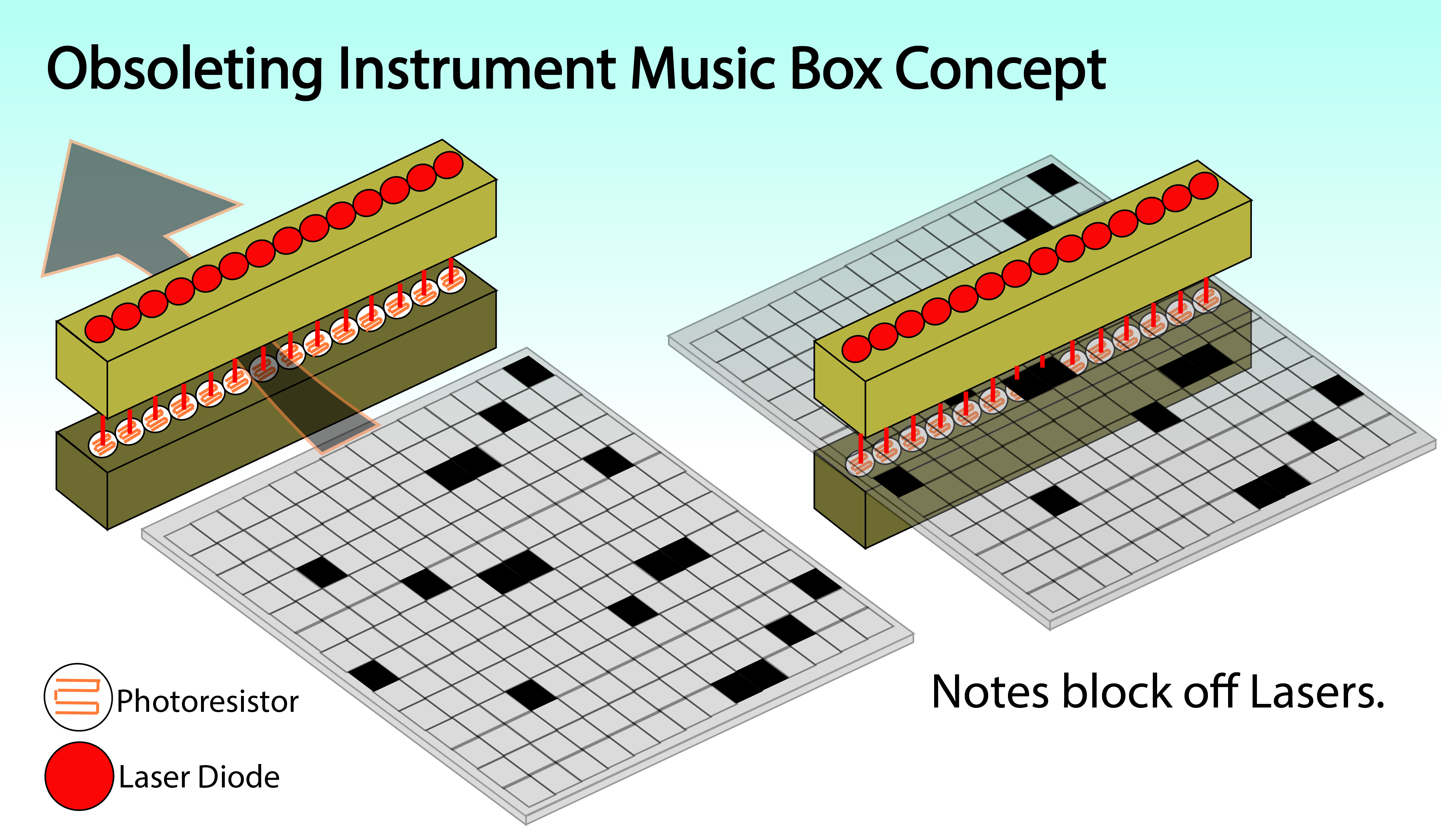
 Pew Pew PEW. look at dem laZEERRRRR
Pew Pew PEW. look at dem laZEERRRRR



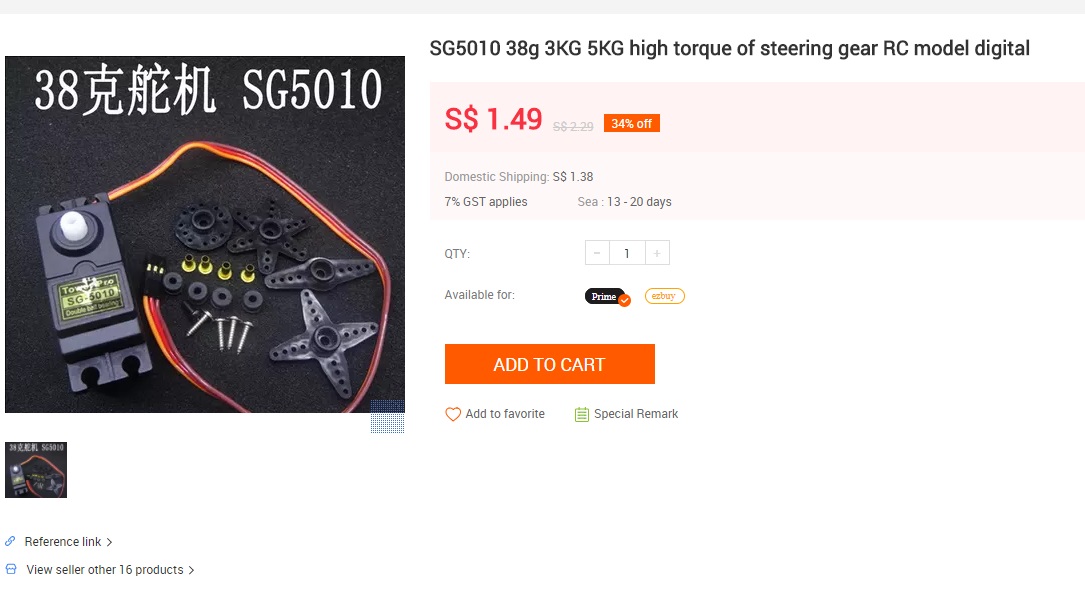



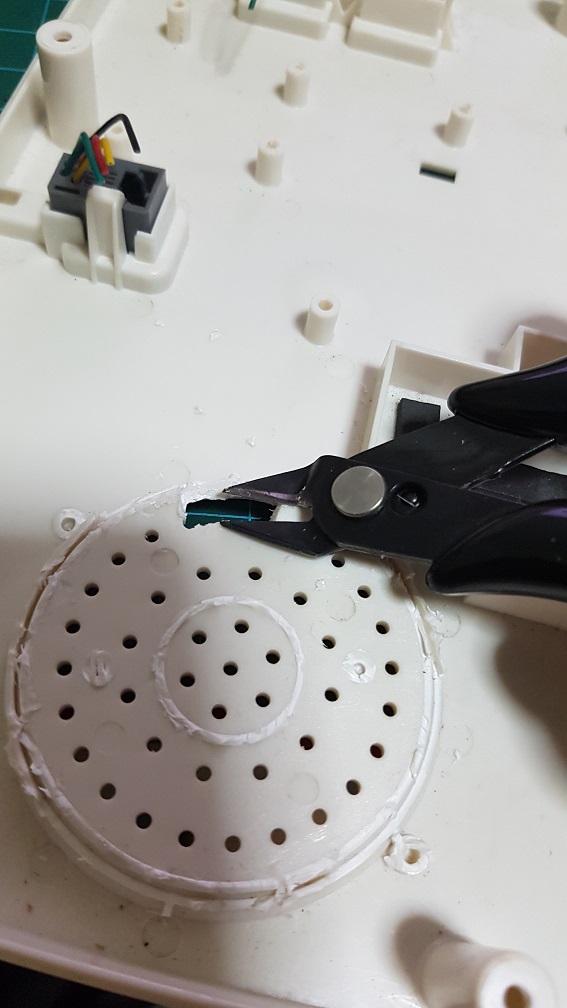
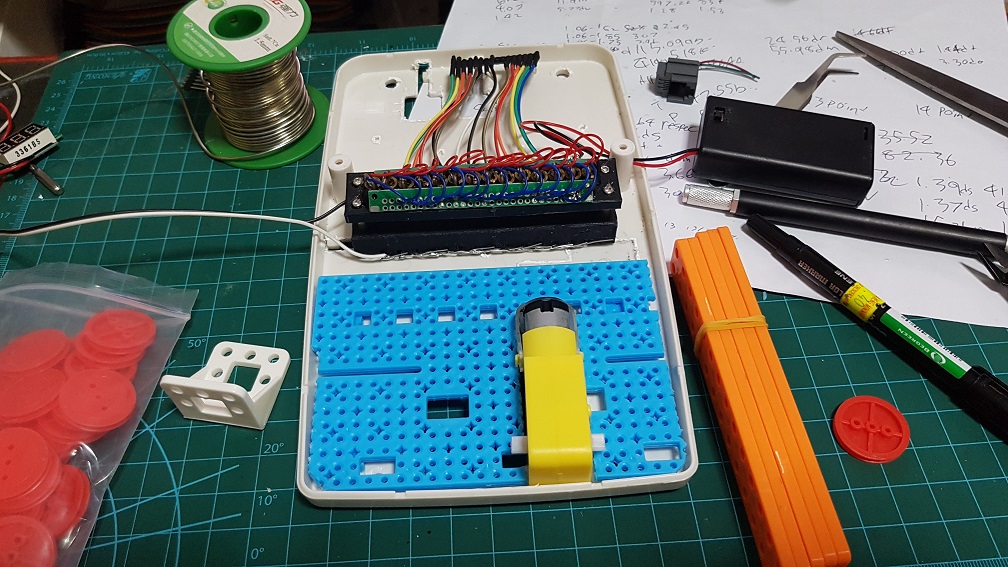
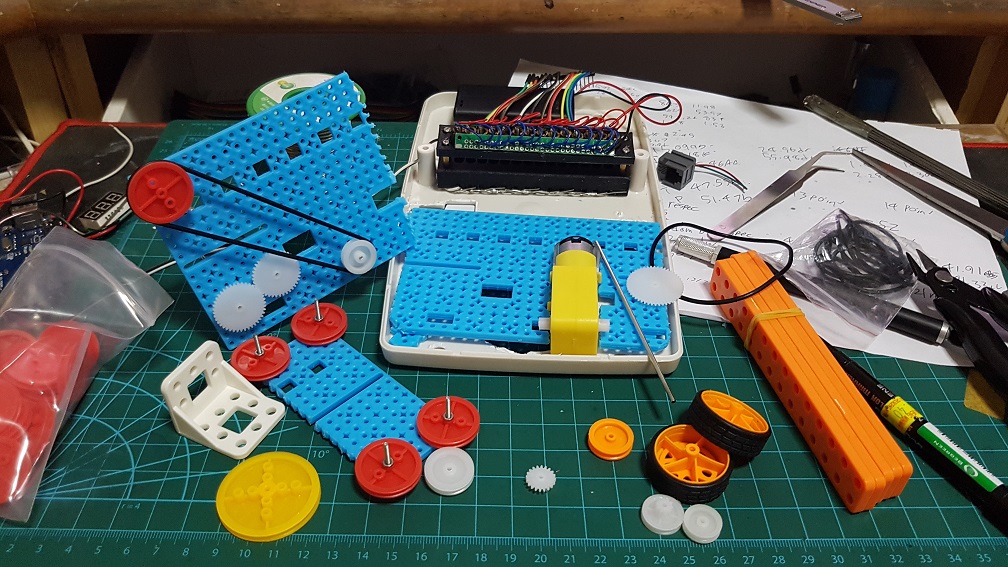
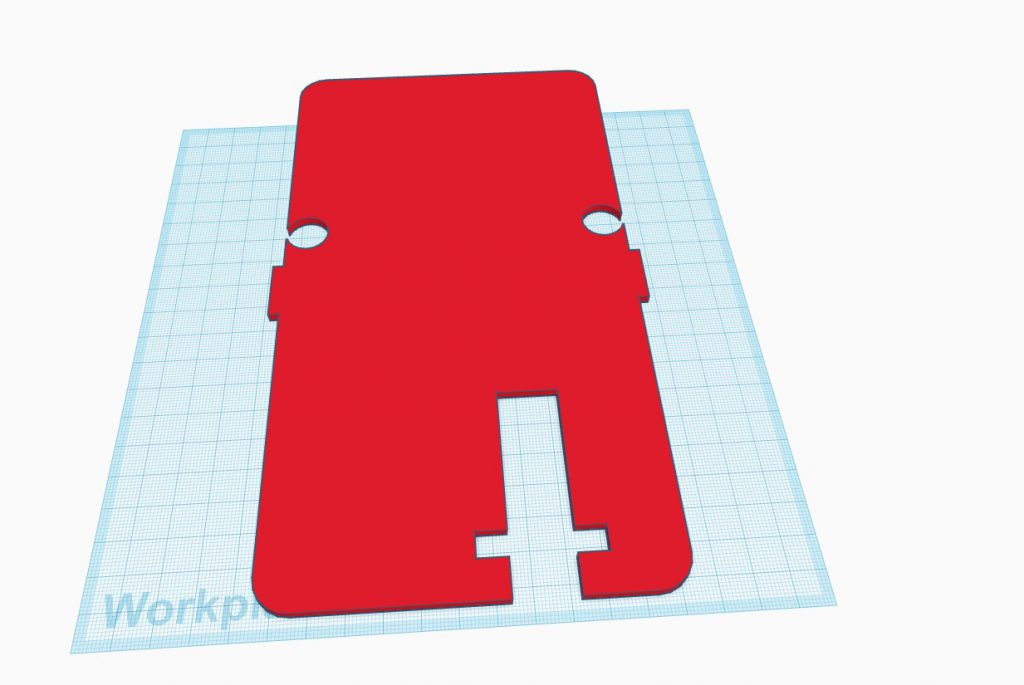
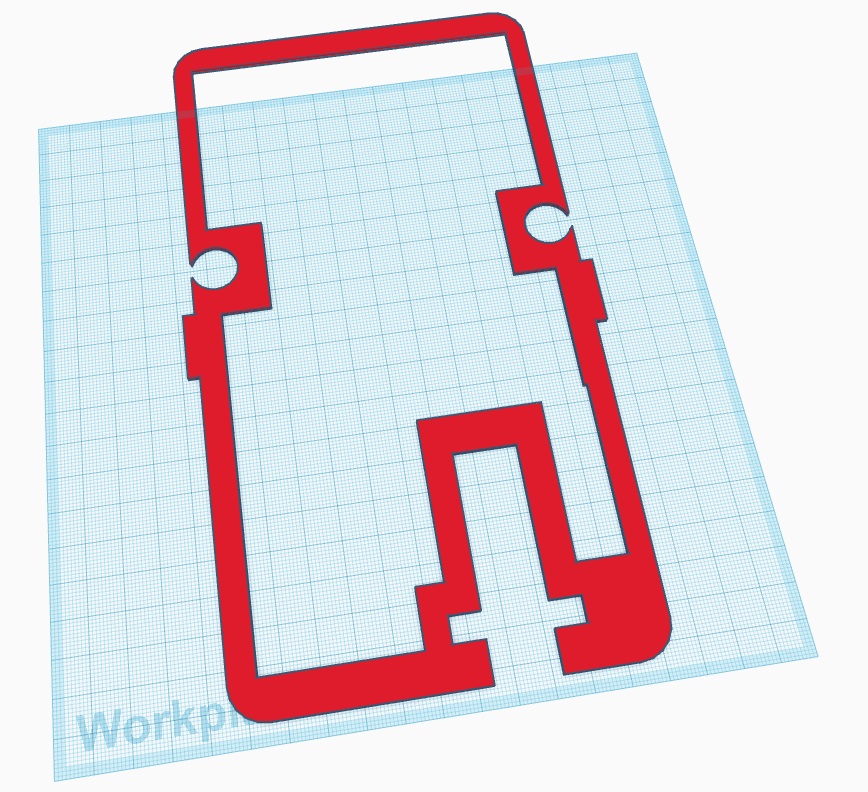
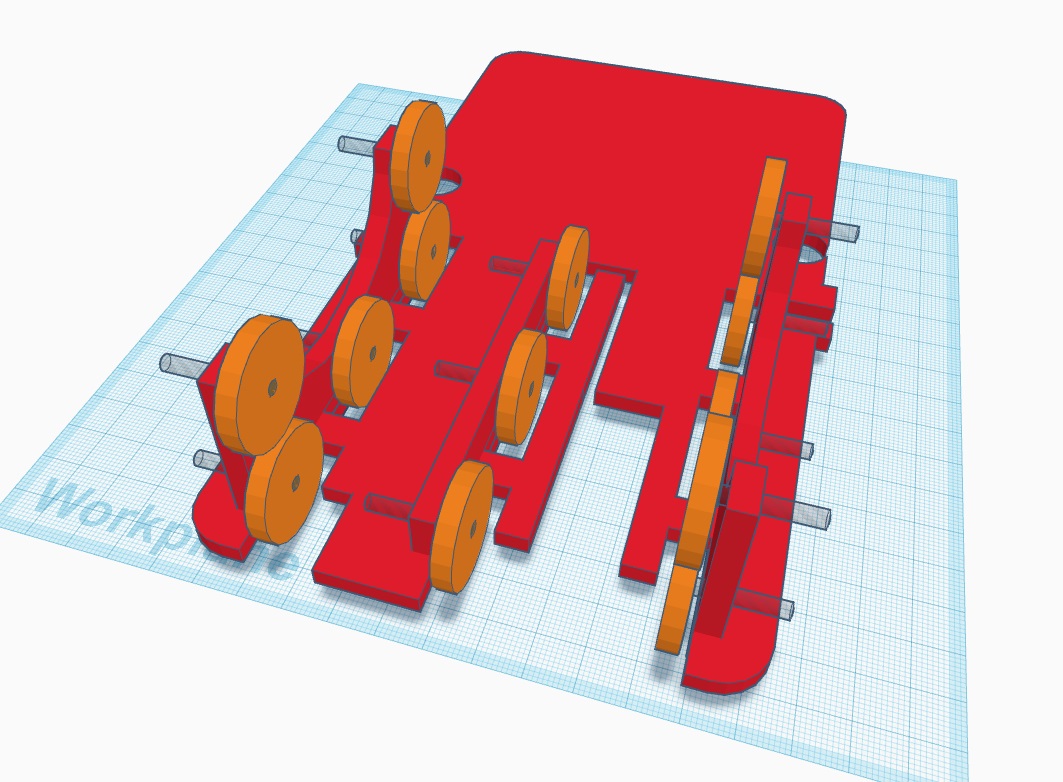
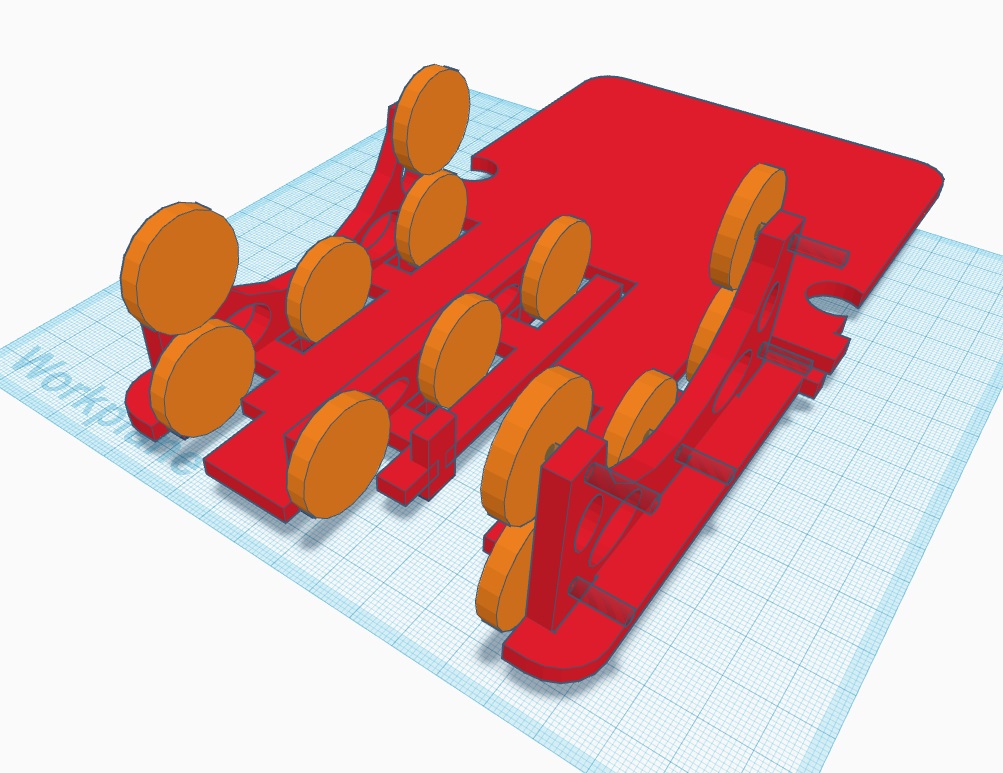
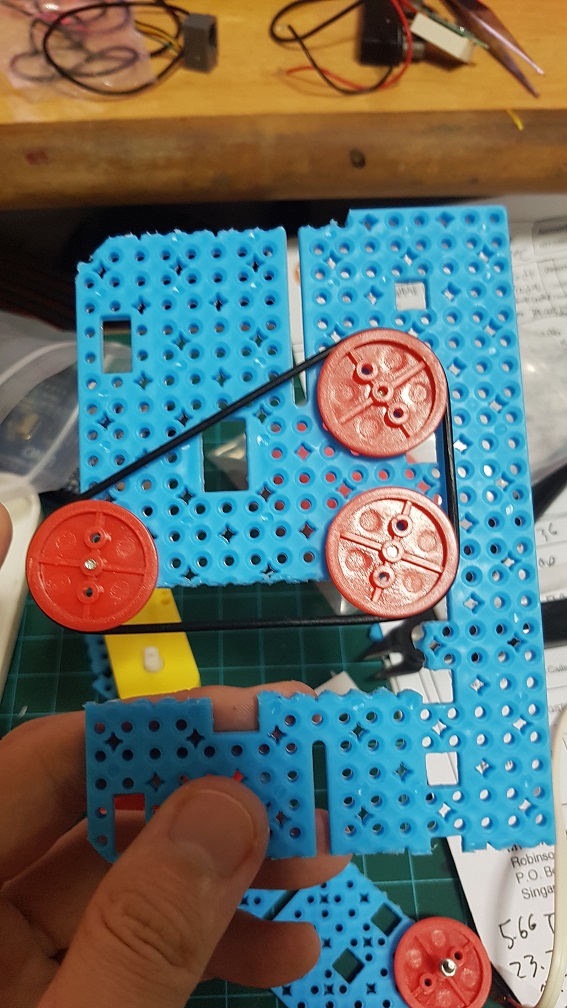
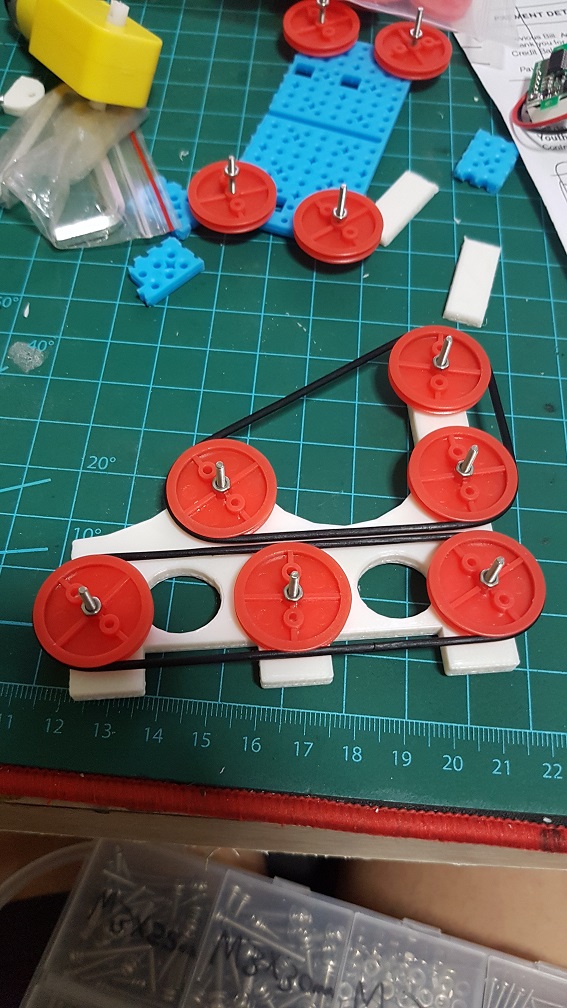
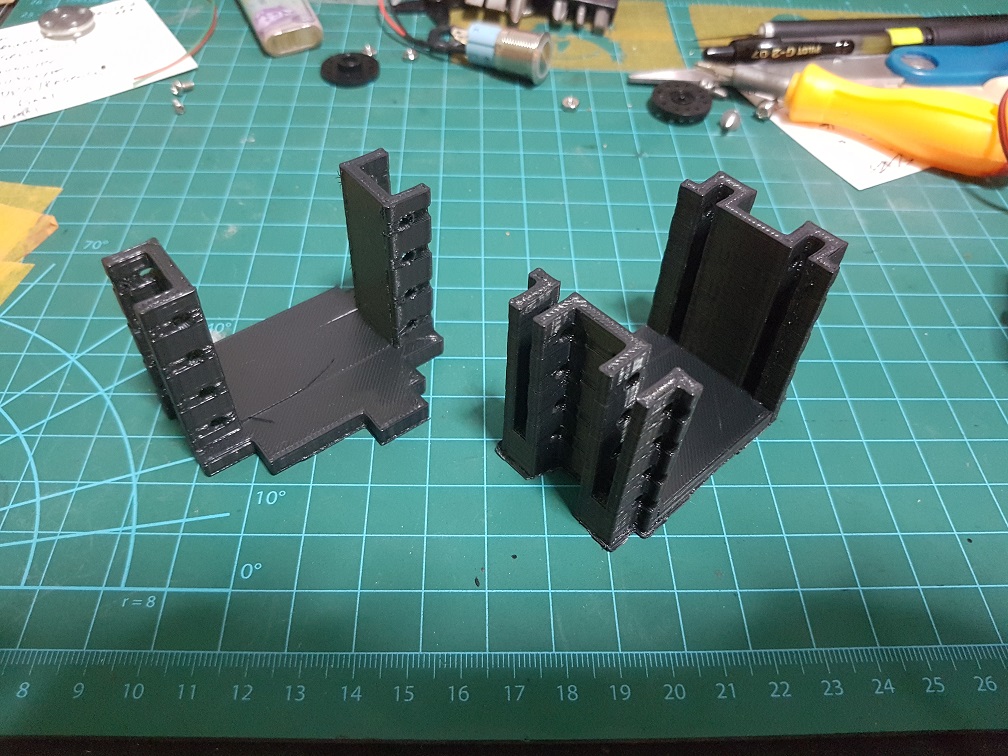
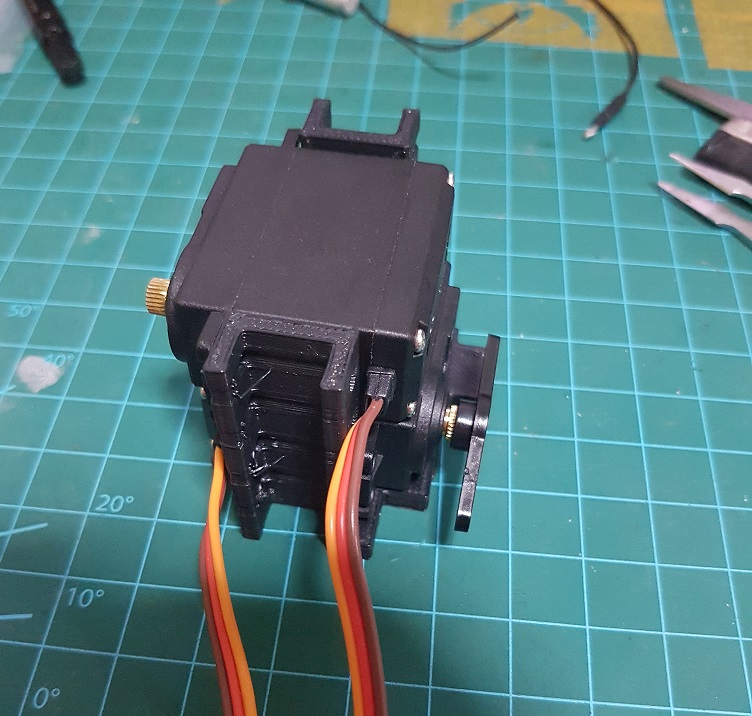 Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.
Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.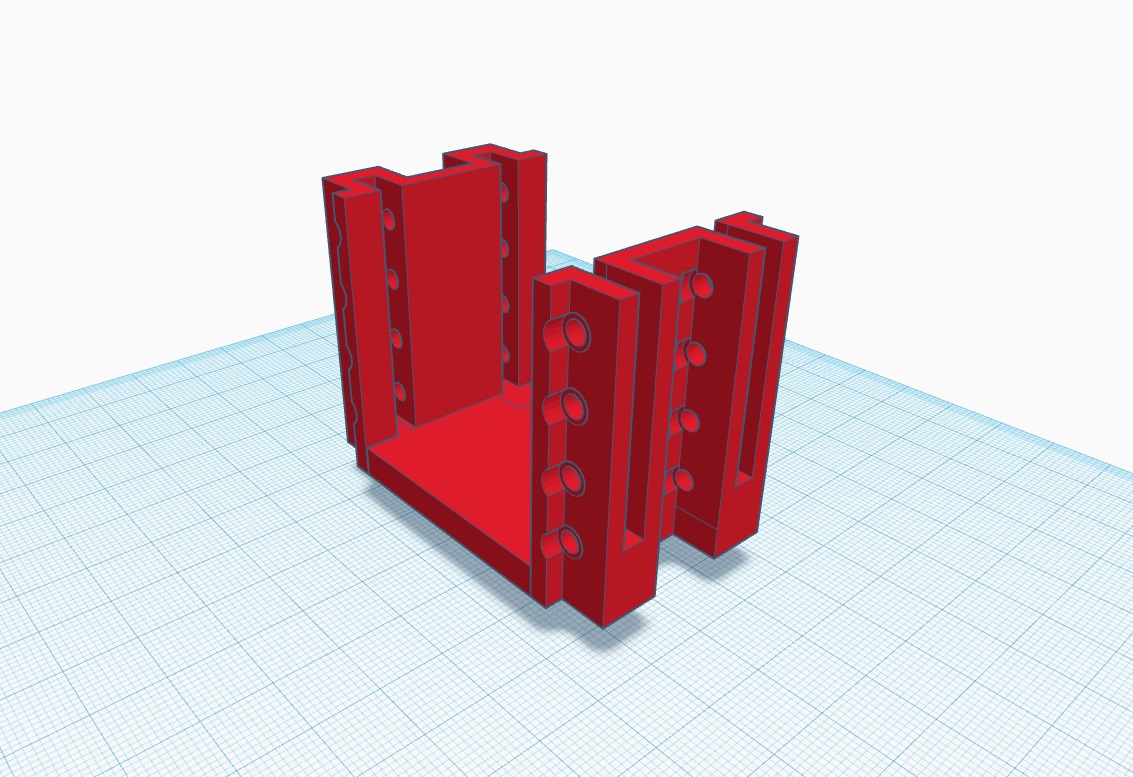





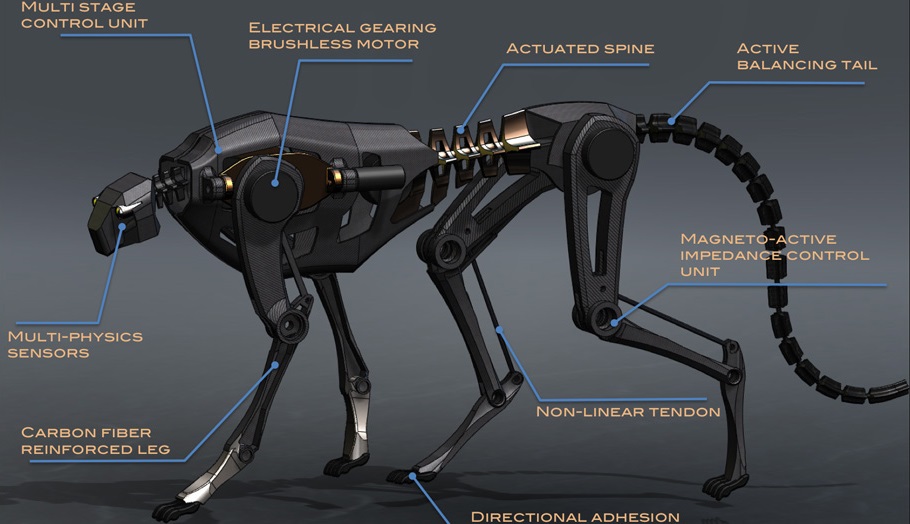

 Notice how it move 1 foot at a time when turning and how it walks.
Notice how it move 1 foot at a time when turning and how it walks.



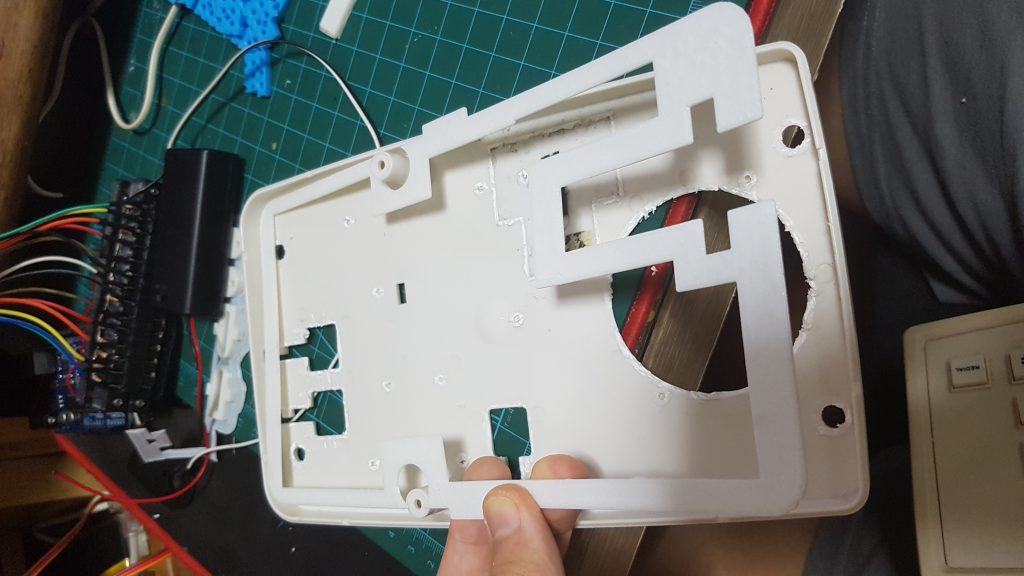
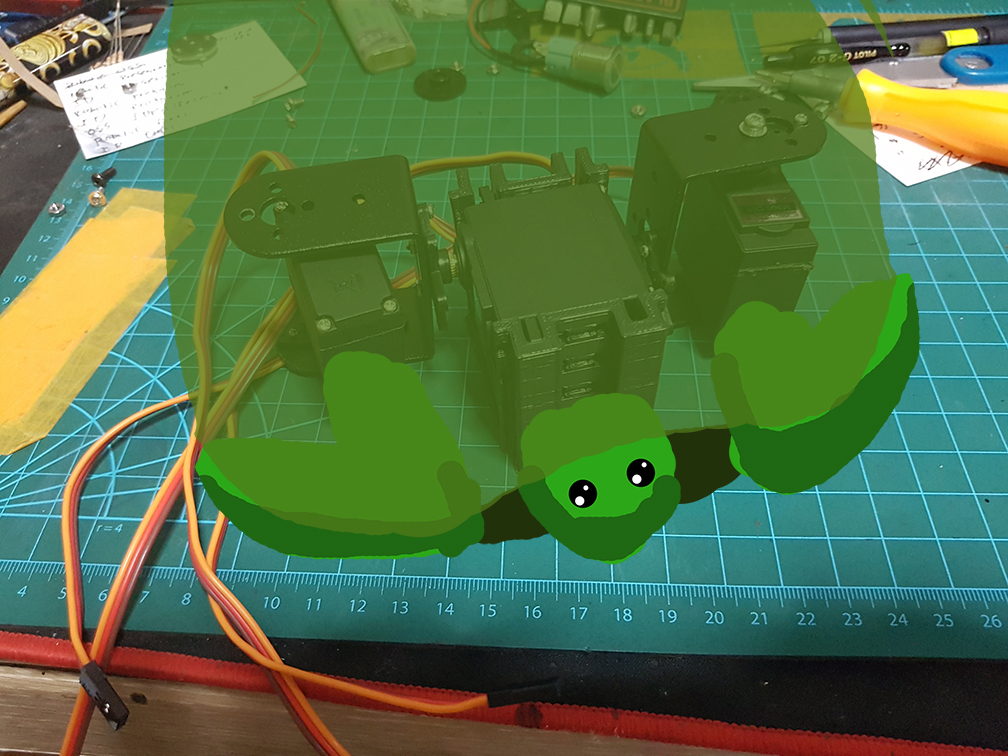
 This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
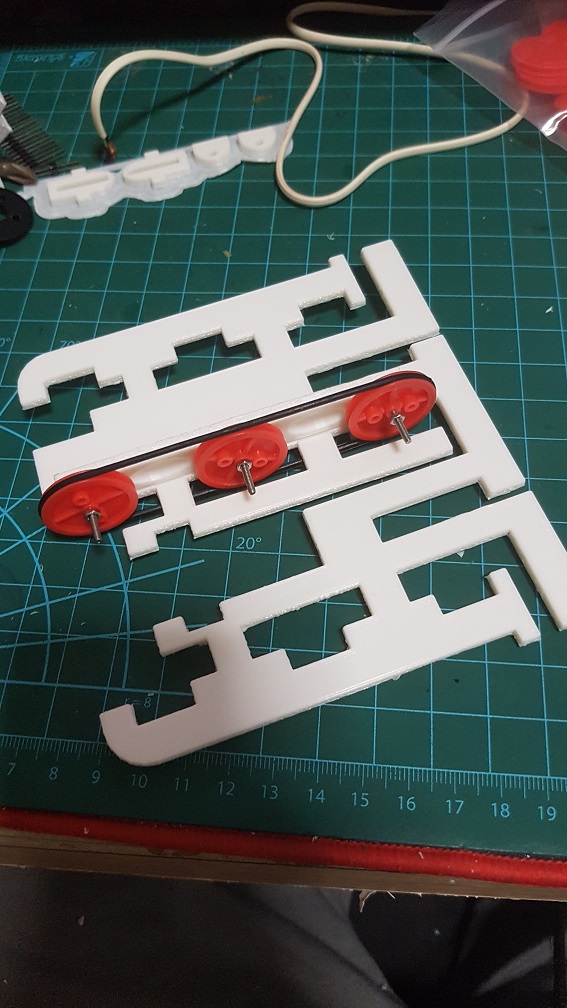
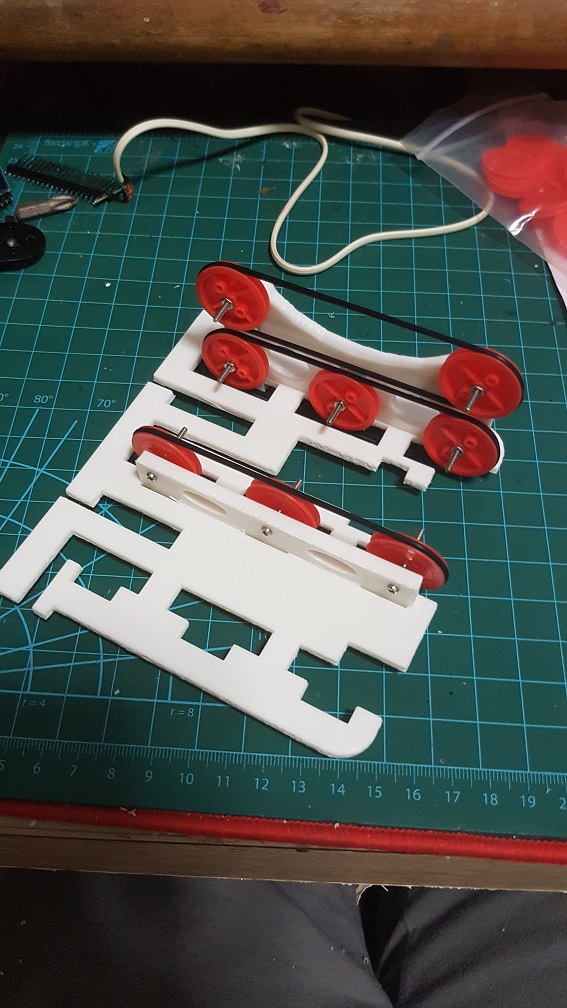
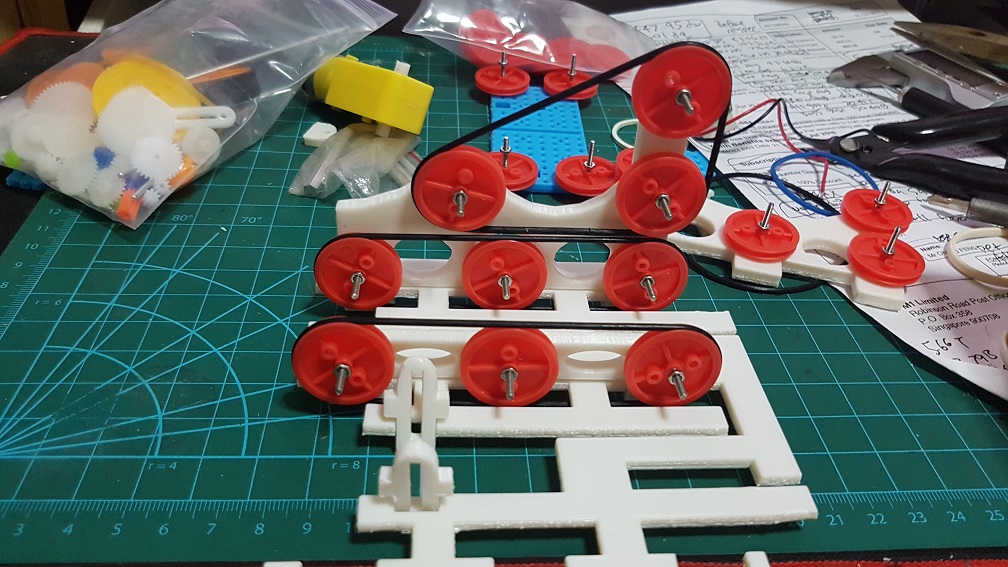
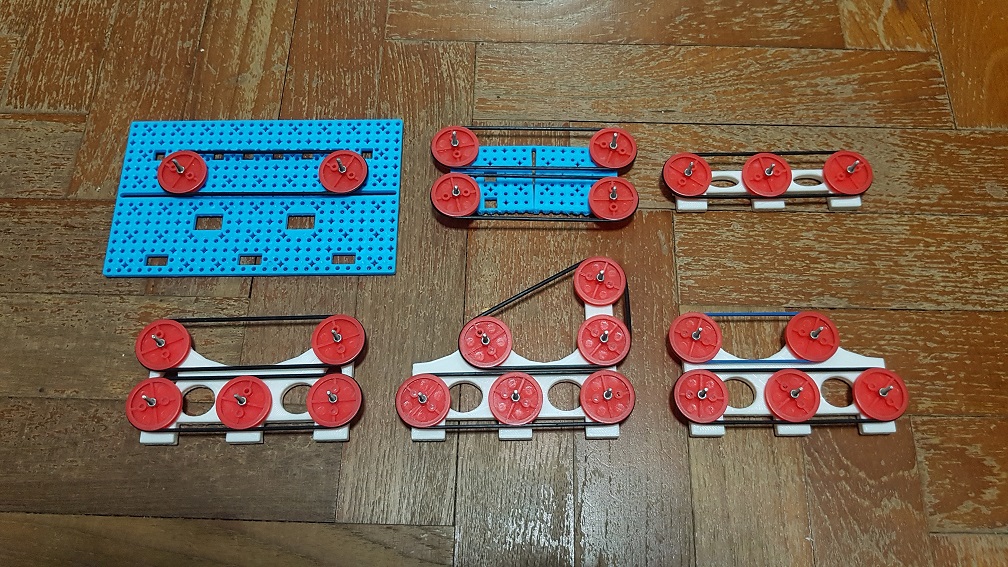
 The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot,
The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot, 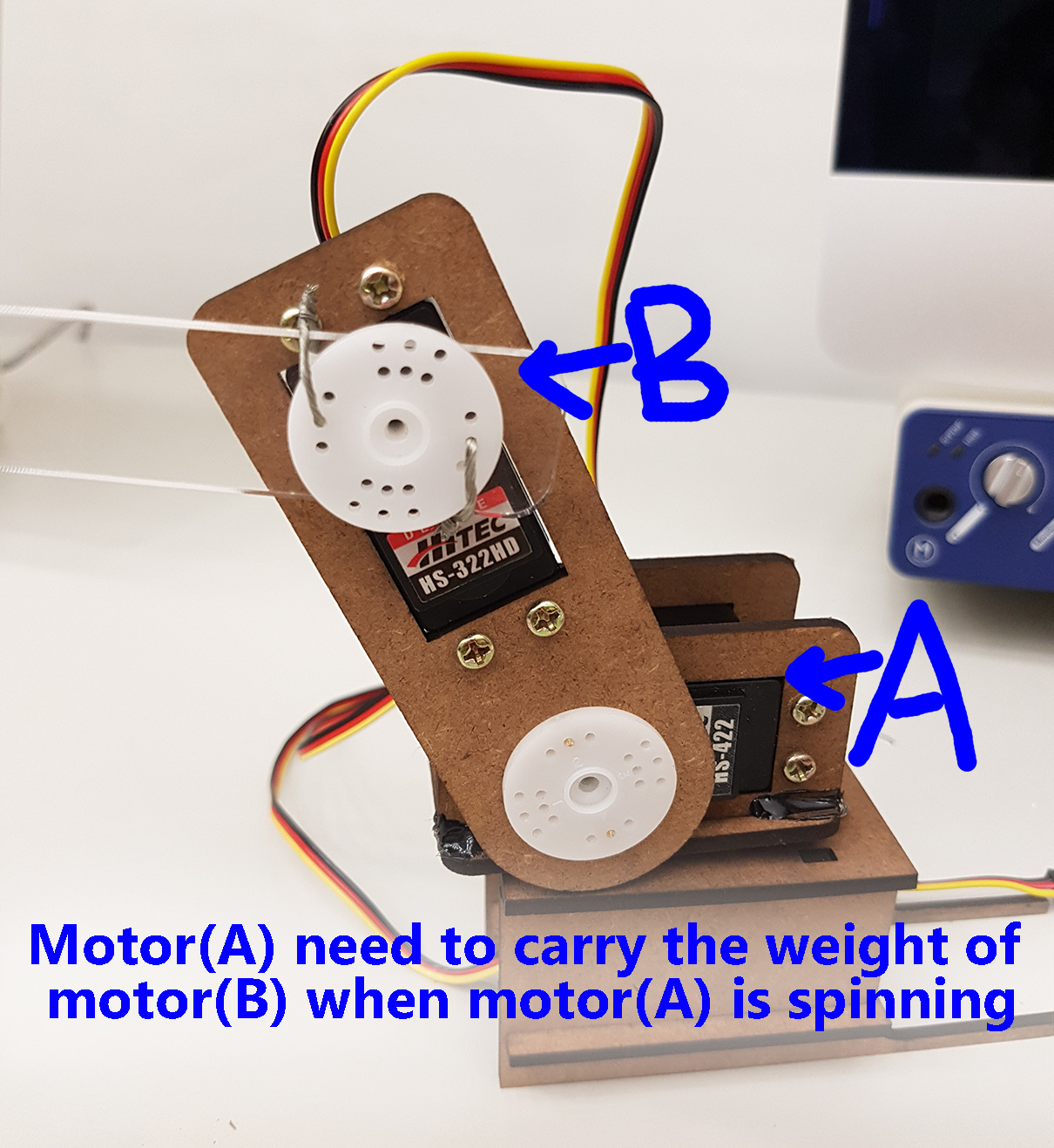 This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)
This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)