There is only testing and remodeling, testing and remodeling after i went to simlim to look for a battery 2 weeks ago.



After that, the battery could also power no more than 3 servo at once so I purchases some AC-DC 6V 10A converter online and had been waiting for its arrival since then.
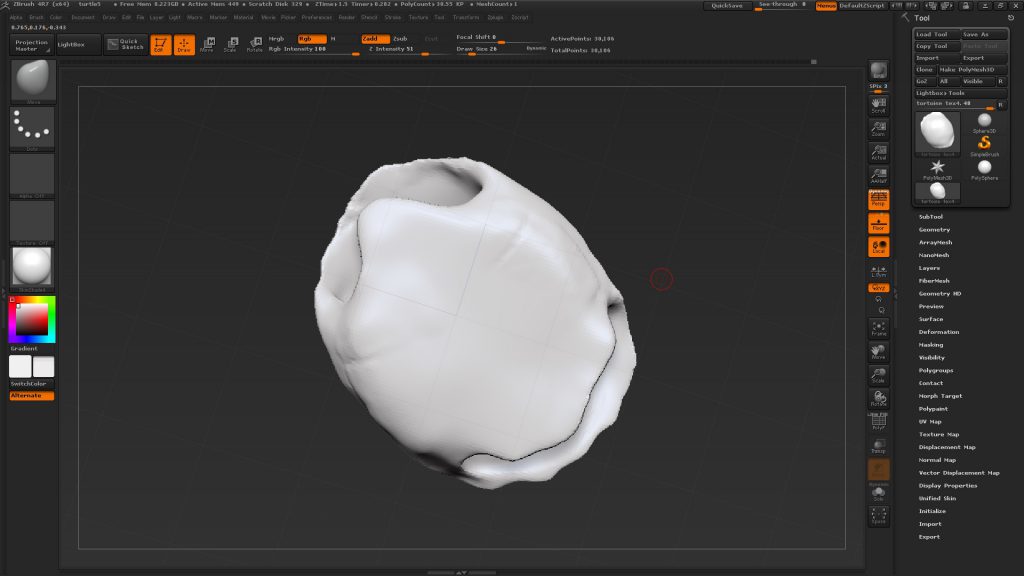
meanwhile waiting, all I did was re-model almost everything again and again…. and I also downloaded ZBrush- a 3d sculpting software and learnt it just for me to sculpt the turtle appearance since i have to learn it sooner or later and luckily I tried it now so I know that there are actually a lot of problems in my current structure when place in the shell I modeled afterwards.
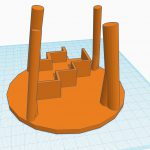
After last post, I’ve built a bigger base mount for the turtle.
 This was originally the rough full size for the turtle base, Version1, Version 2 with 2 arm motor attached, and Version 3 with no Arm motor attached.
This was originally the rough full size for the turtle base, Version1, Version 2 with 2 arm motor attached, and Version 3 with no Arm motor attached.And I downloaded Zbrush and started to learn how to sculpt something in it and MANNNNN IT IS HARRDDDDD
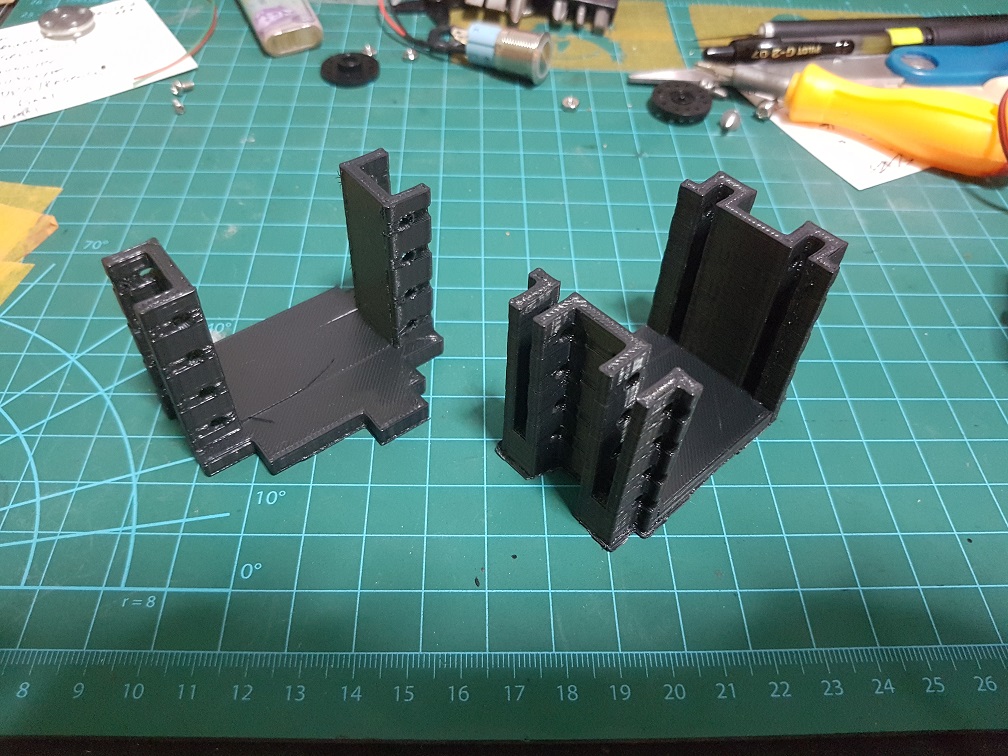
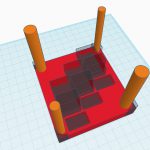
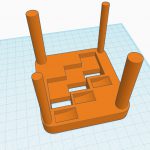
 And then I printed it out in smaller scale to see how it feels.
And then I printed it out in smaller scale to see how it feels.
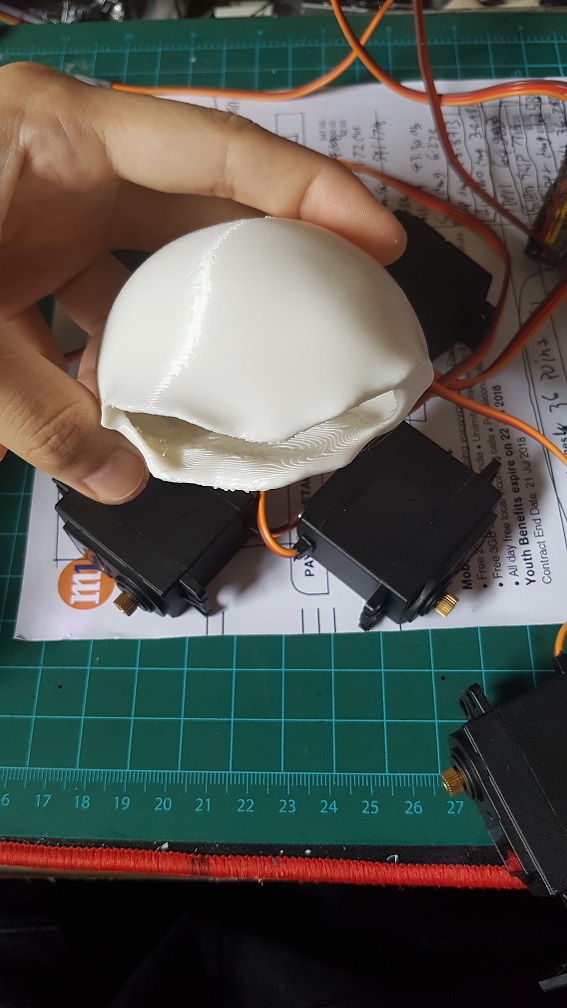 And to check which layout should work.
And to check which layout should work.
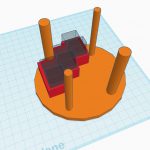
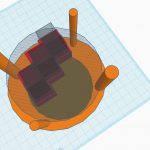
 and since after I did more research on turtle, I realize that the bone structure of the turtle wasn’t straight and so I tilted the motors to give it an angular tilt for it to move more like a turtle.
and since after I did more research on turtle, I realize that the bone structure of the turtle wasn’t straight and so I tilted the motors to give it an angular tilt for it to move more like a turtle. then I tested the structure of this configurations.
then I tested the structure of this configurations.
 I also modeled a arm motor connector and found out that this is WAAAYYY to long for it to work properly, and another problem is that there is still not enough tilt, so I changed from a 45 degree tilt to a 22.5 degree tilt.
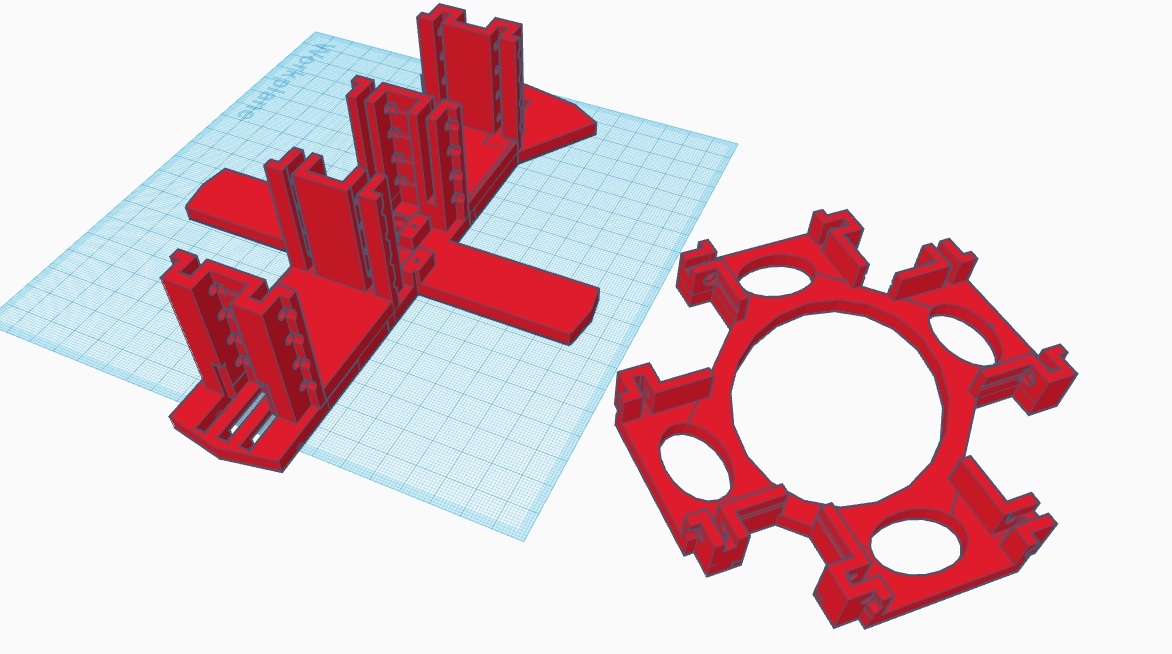
I also modeled a arm motor connector and found out that this is WAAAYYY to long for it to work properly, and another problem is that there is still not enough tilt, so I changed from a 45 degree tilt to a 22.5 degree tilt.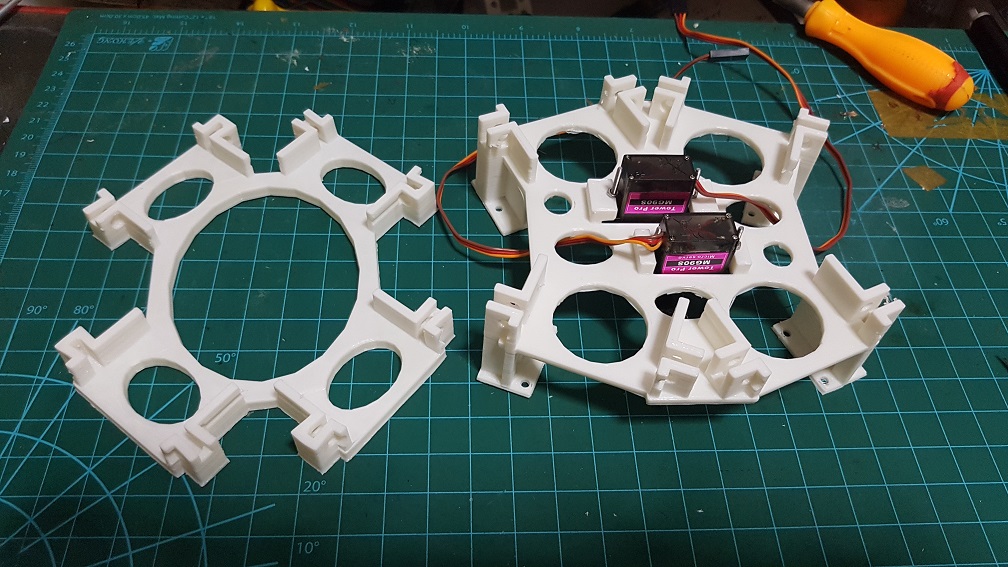 This is the Version 4 and Version 5 of the motor mount, I’ve decide to make it higher so to be able to turn the arm in the correct direction, I’ve also tried to add the middle servo which will control the turtle head retraction and head/tail turning.
This is the Version 4 and Version 5 of the motor mount, I’ve decide to make it higher so to be able to turn the arm in the correct direction, I’ve also tried to add the middle servo which will control the turtle head retraction and head/tail turning.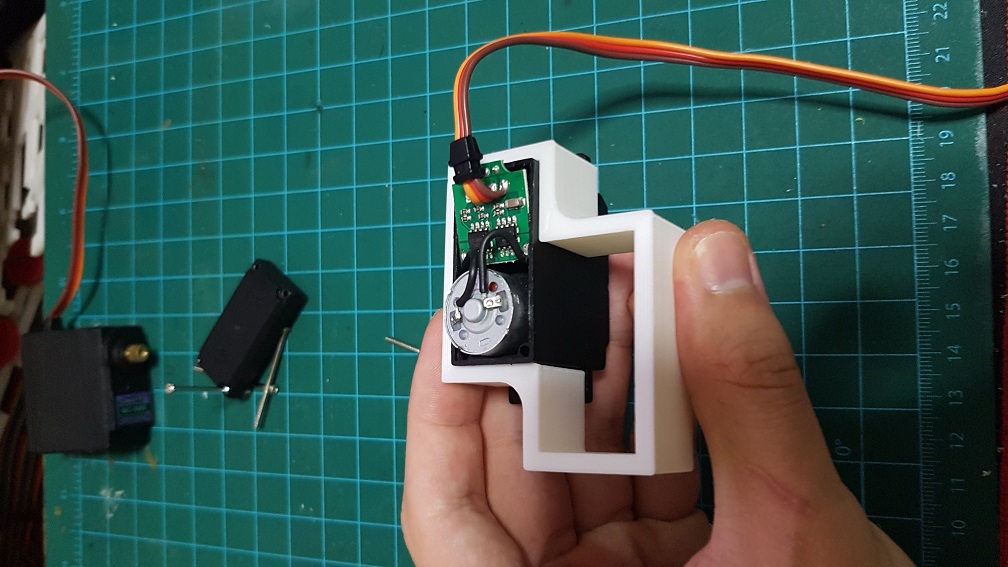
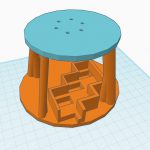
 This is with Version 5 base and version 2 Motor connector which are much shorter.
This is with Version 5 base and version 2 Motor connector which are much shorter.
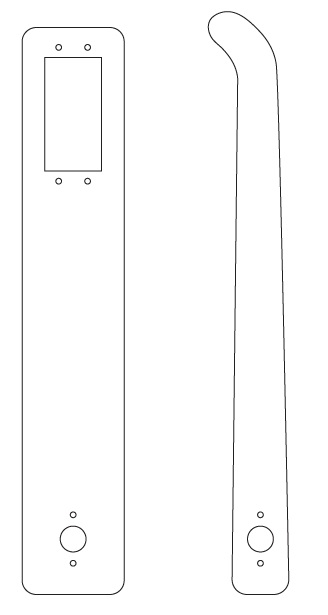
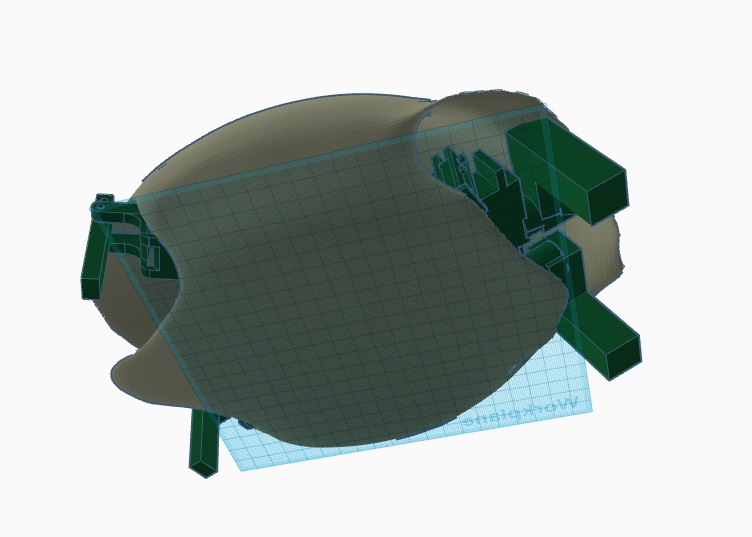
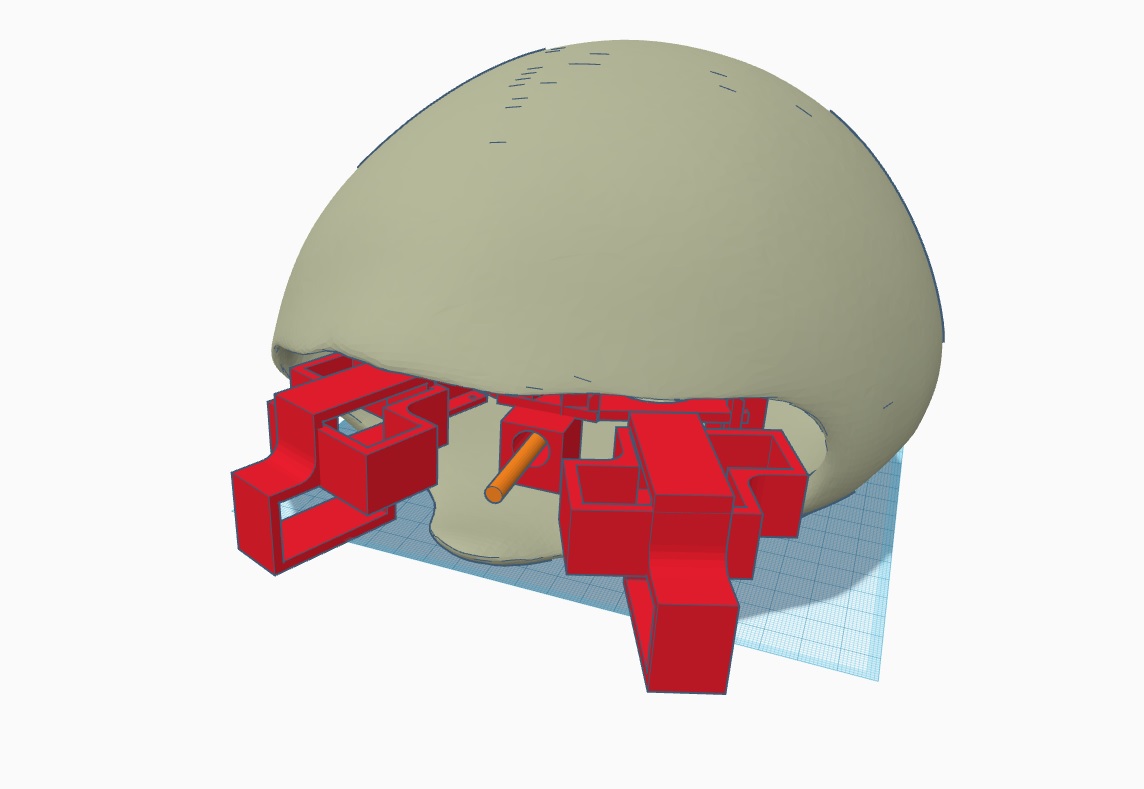 Next, I further edit the turtle shell and upscale it to see how it fits into my system, however i found many problems here like it doesnt fit well. Since I can make adjustments to the layout, I decided to use another method to do the leg mechanism.
Next, I further edit the turtle shell and upscale it to see how it fits into my system, however i found many problems here like it doesnt fit well. Since I can make adjustments to the layout, I decided to use another method to do the leg mechanism.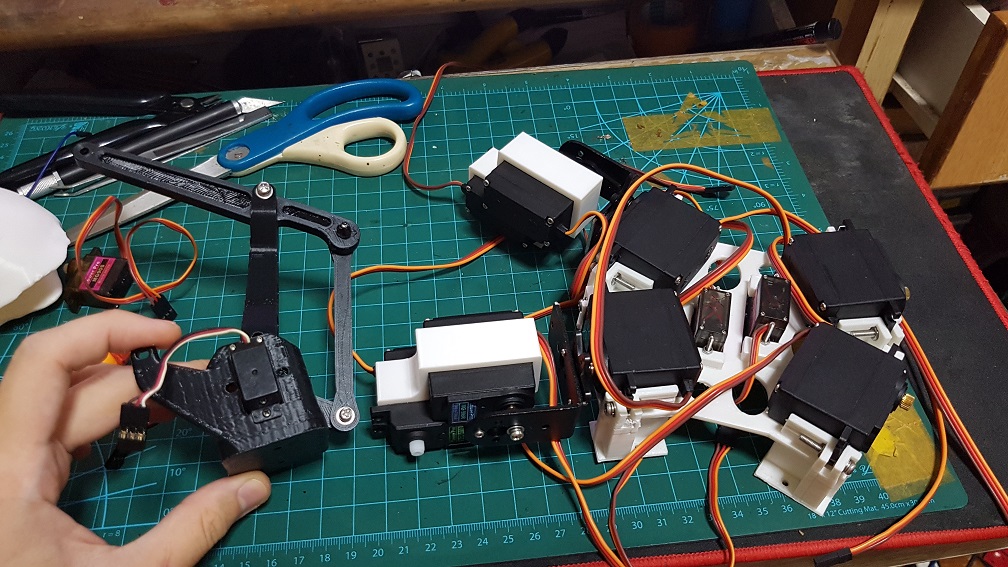 By combining this lever system straight into the leg.
By combining this lever system straight into the leg.
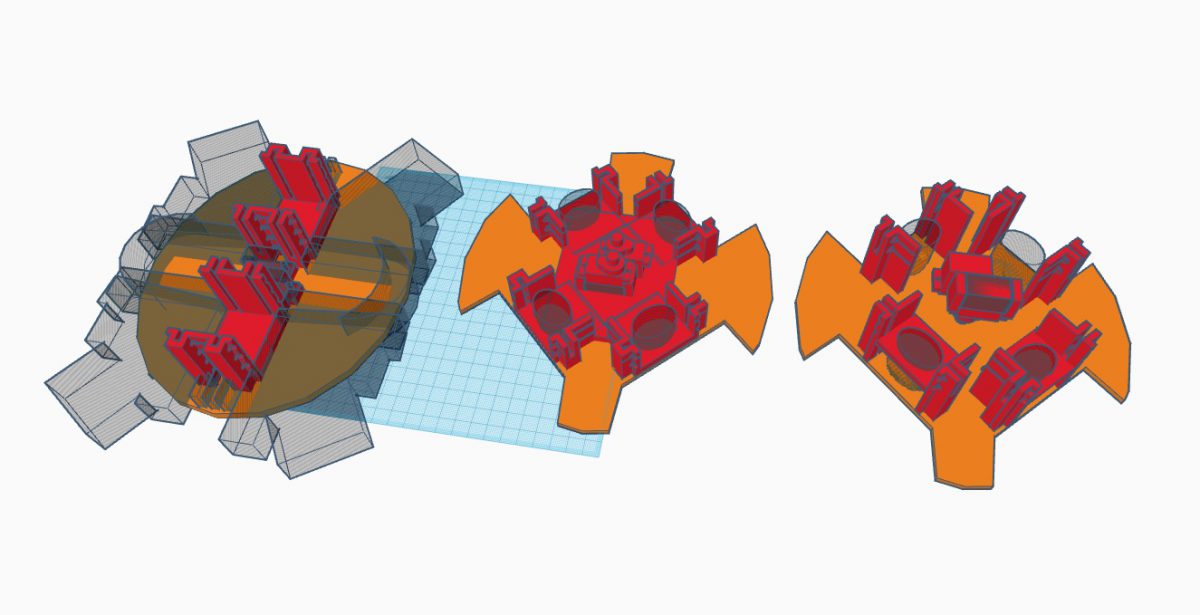
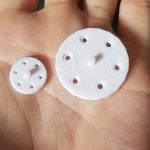
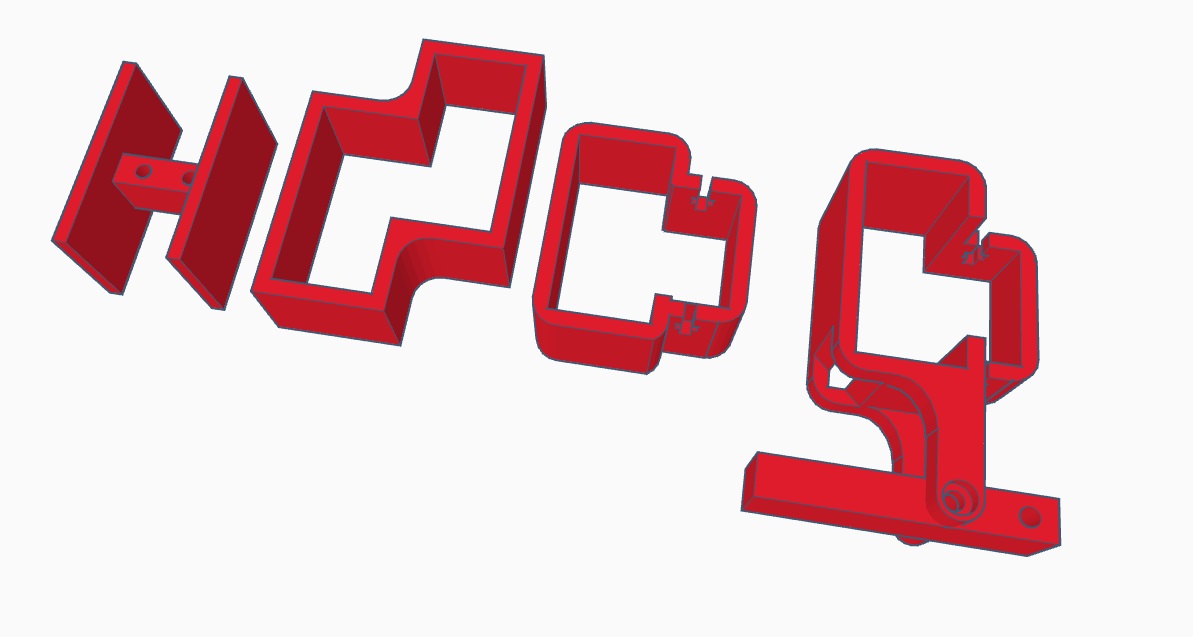 The 4 generation of motor connector.
The 4 generation of motor connector.

 This should be the mechanism I will use for the leg, I hope it works.
This should be the mechanism I will use for the leg, I hope it works.
for now, I have to test them out again.





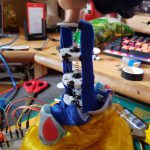
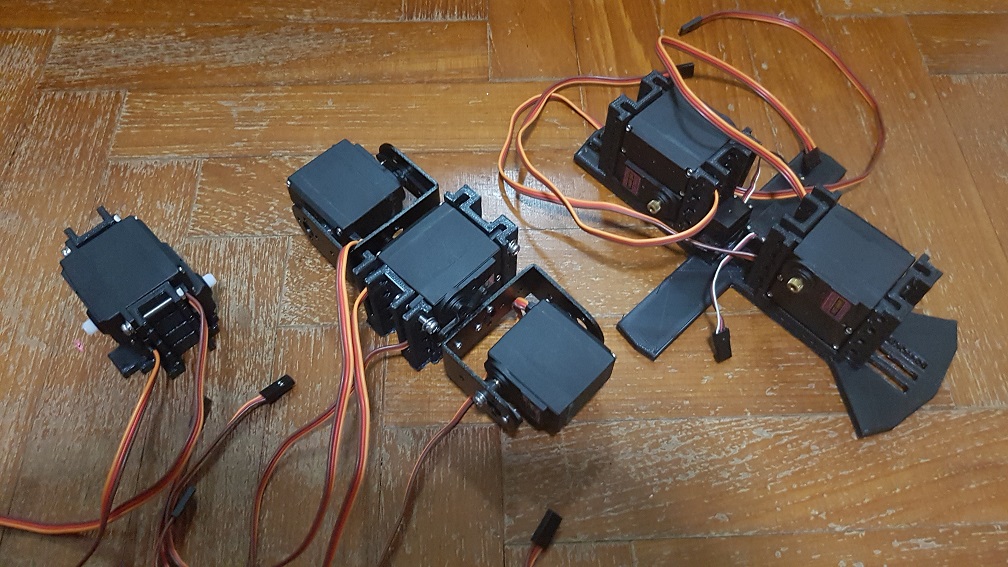
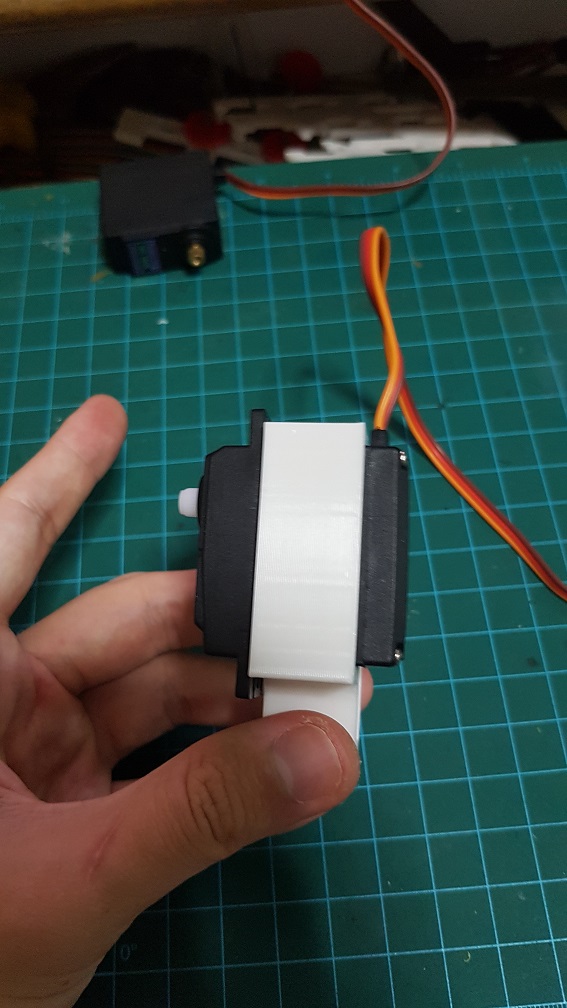
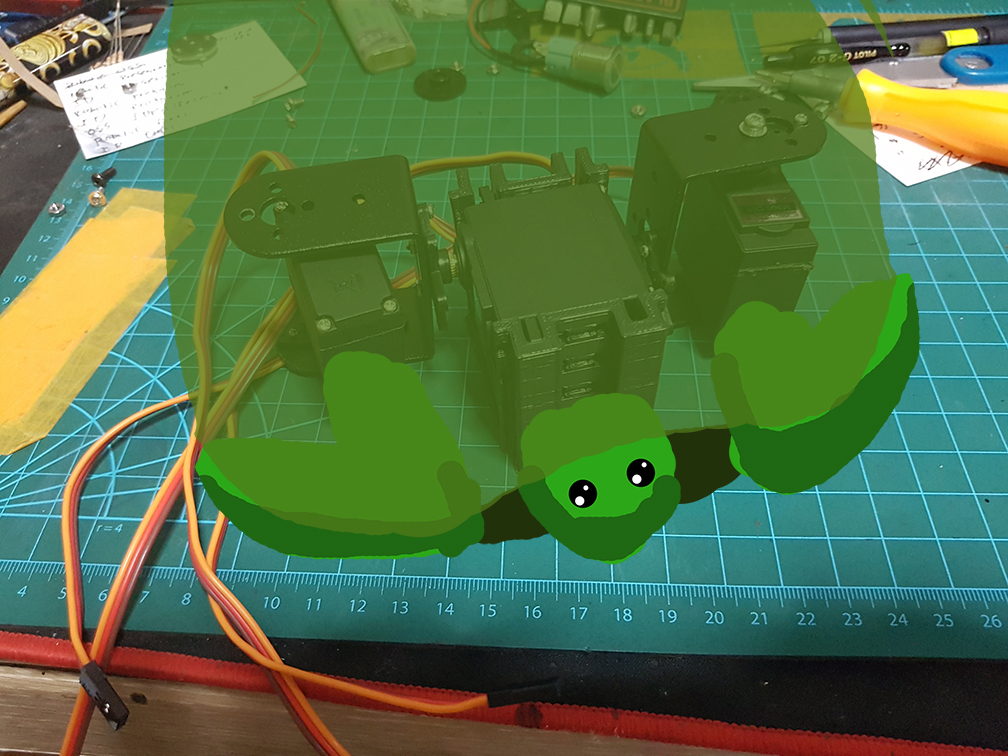
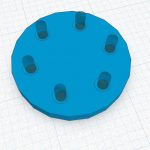
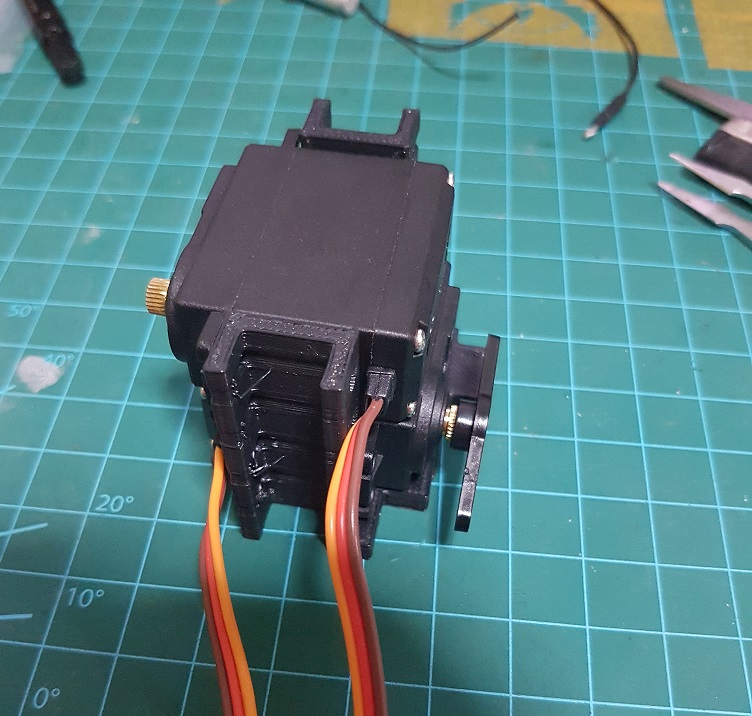 Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.
Prototype of stacking the Shoulder motors, I’ve realized that the left motor should be at the bottom and right motor should be at the top as one will spin clock wise and other will spin counter clockwise to make it the same height when their pivot are not centralized.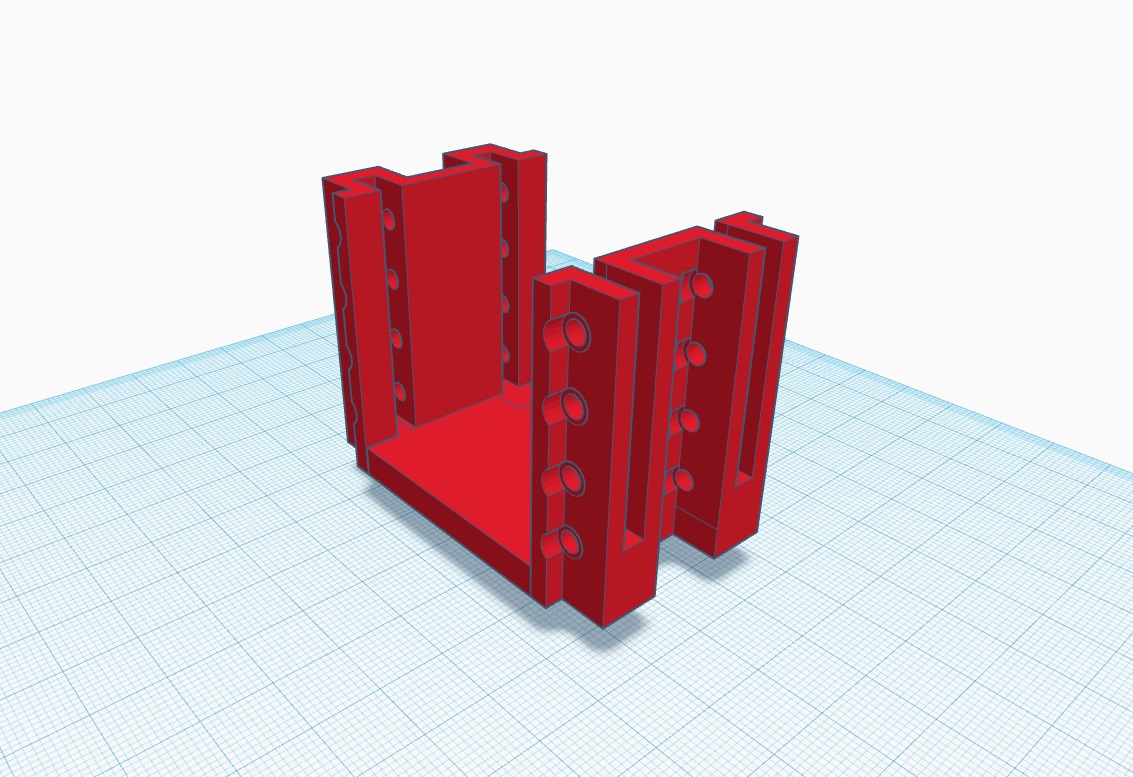



 Notice how it move 1 foot at a time when turning and how it walks.
Notice how it move 1 foot at a time when turning and how it walks.

 This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
This is how a Tortoise retract its head, by bending its “neck” inwards. maybe I could emulate this.
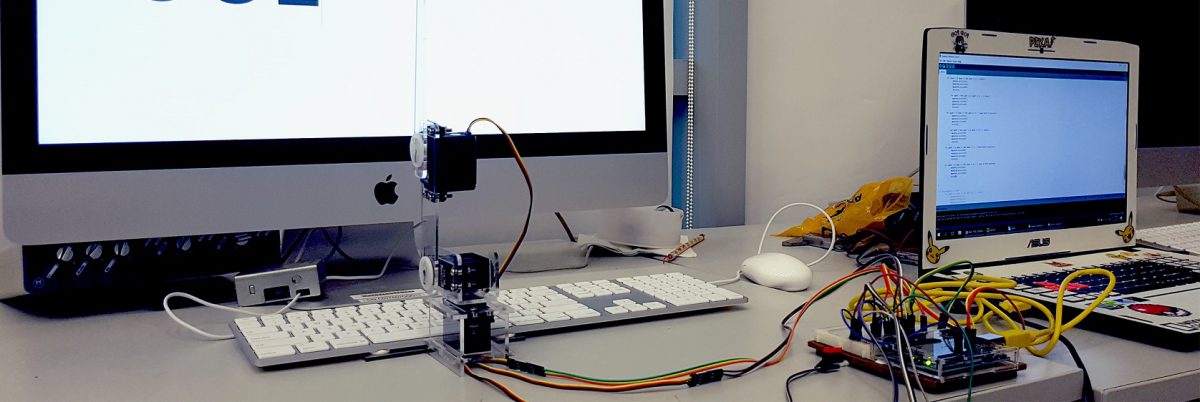
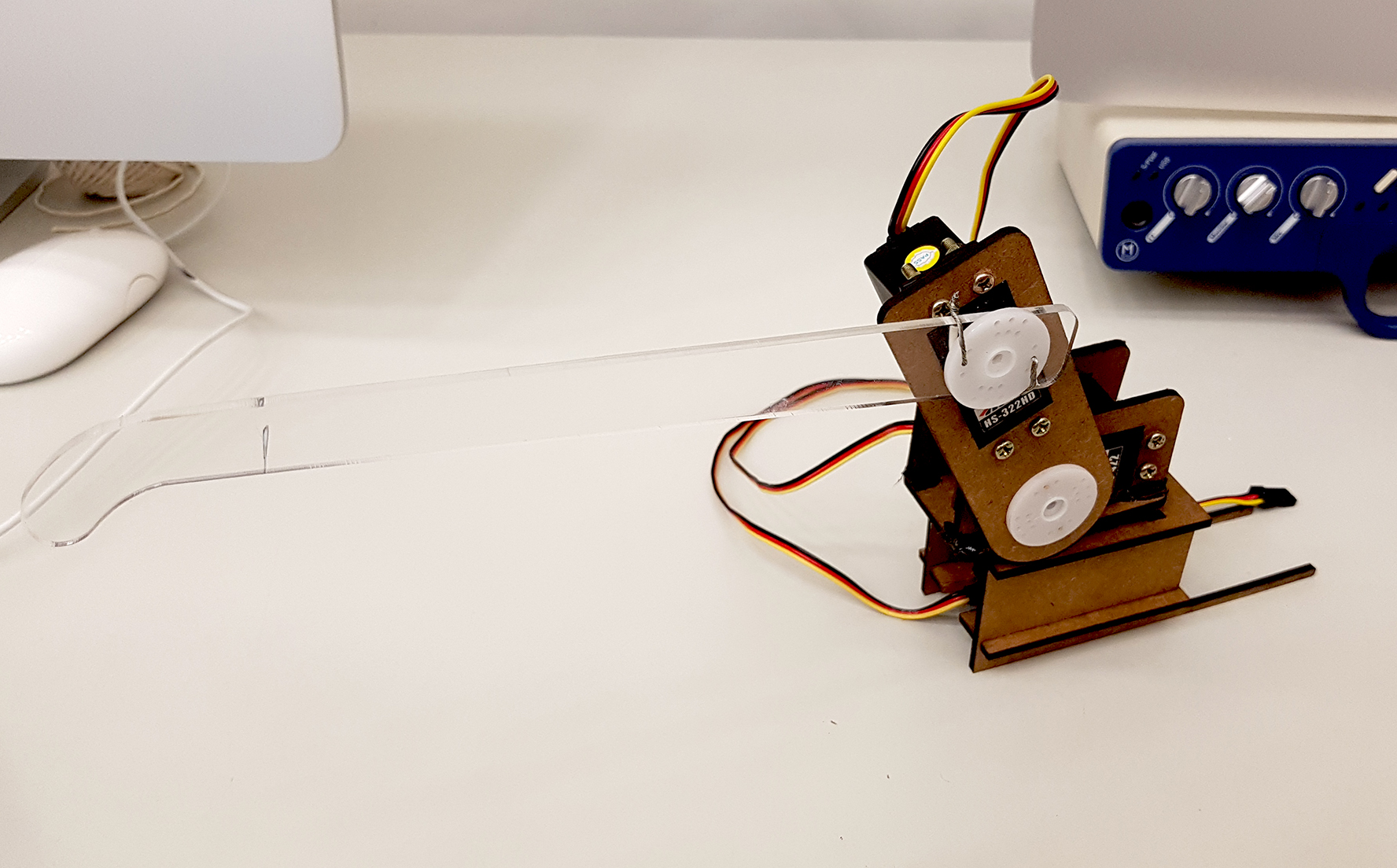
 The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot,
The two motor is at the base of the mechanical arm(Typebot), in comparison to our typebot, 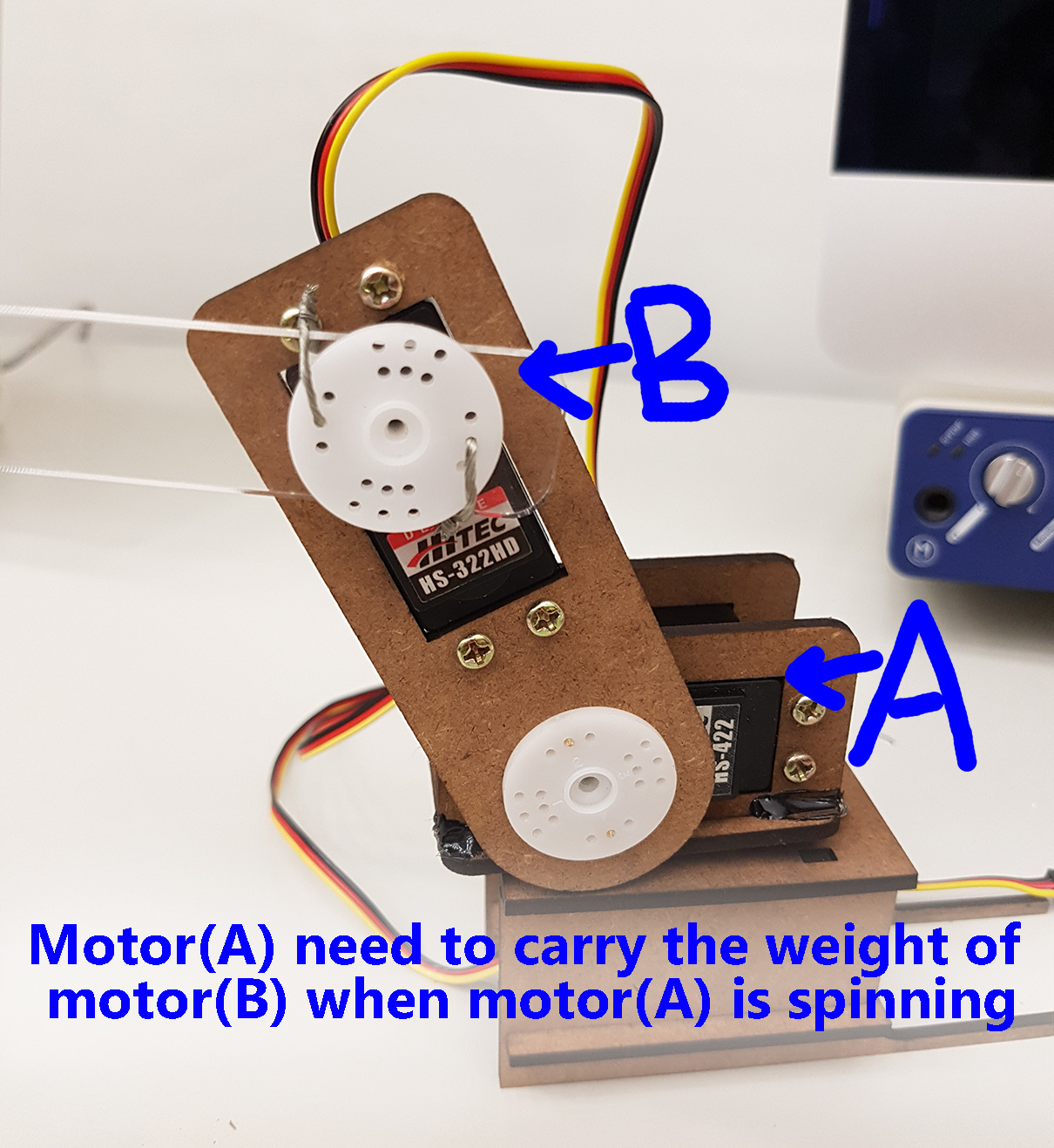 This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)
This Typebot system is less efficient unless the torque of the motor far exceed the weight of the system and only a when there is a short (A) to (B) distance(longer fulcrum, more torque needed to turn it)
 Chris Trying to interact with Nadine.
Chris Trying to interact with Nadine. Photo credit to Isaac Chu
Photo credit to Isaac Chu





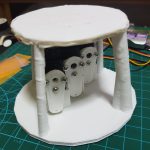



 One spring in the middle was too flimsy until we added strings
One spring in the middle was too flimsy until we added strings emulation of 3 motors and movements, We were impressed.
emulation of 3 motors and movements, We were impressed. And we fixed everything together and tied it with fishing lines.
And we fixed everything together and tied it with fishing lines.